Integralrechnung
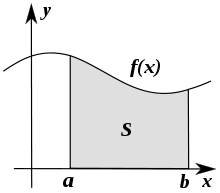
 unter dem Graphen einer Funktion
unter dem Graphen einer Funktion  im Integrationsbereich von
im Integrationsbereich von  bis
bis 
Die Integralrechnung ist neben der Differentialrechnung der wichtigste Zweig der mathematischen Disziplin Analysis. Sie ist aus dem Problem der Flächen- und Volumenberechnung entstanden. Das Integral ist ein Oberbegriff für das unbestimmte und das bestimmte Integral. Die Berechnung von Integralen heißt Integration.
Das bestimmte Integral einer Funktion
ordnet dieser eine Zahl zu. Bildet man das bestimmte Integral einer reellen
Funktion in einer Variablen,
so lässt sich das Ergebnis im zweidimensionalen Koordinatensystem als
Flächeninhalt der
Fläche, die zwischen dem Graphen der Funktion, der  -Achse
sowie den begrenzenden Parallelen zur
-Achse
sowie den begrenzenden Parallelen zur  -Achse
liegt, deuten. Hierbei zählen Flächenstücke unterhalb der -Achse
negativ. Man spricht vom orientierten Flächeninhalt (auch
Flächenbilanz). Diese Konvention wird gewählt, damit das bestimmte
Integral eine lineare
Abbildung ist, was sowohl für theoretische Überlegungen als auch für
konkrete Berechnungen eine zentrale Eigenschaft des Integralbegriffs darstellt.
Auch wird so sichergestellt, dass der sogenannte Hauptsatz
der Differential- und Integralrechnung gilt.
-Achse
liegt, deuten. Hierbei zählen Flächenstücke unterhalb der -Achse
negativ. Man spricht vom orientierten Flächeninhalt (auch
Flächenbilanz). Diese Konvention wird gewählt, damit das bestimmte
Integral eine lineare
Abbildung ist, was sowohl für theoretische Überlegungen als auch für
konkrete Berechnungen eine zentrale Eigenschaft des Integralbegriffs darstellt.
Auch wird so sichergestellt, dass der sogenannte Hauptsatz
der Differential- und Integralrechnung gilt.
Das unbestimmte Integral einer Funktion ordnet dieser eine Menge von Funktionen zu, deren Elemente Stammfunktionen genannt werden. Diese zeichnen sich dadurch aus, dass ihre ersten Ableitungen mit der Funktion, die integriert wurde, übereinstimmen. Der Hauptsatz der Differential- und Integralrechnung gibt Auskunft darüber, wie bestimmte Integrale aus Stammfunktionen berechnet werden können.
Im Gegensatz zur Differentiation existiert für die Integration auch elementarer Funktionen kein einfacher und kein alle Fälle abdeckender Algorithmus. Integration erfordert trainiertes Raten, das Benutzen spezieller Umformungen (Integration durch Substitution, partielle Integration), Nachschlagen in einer Integraltafel oder das Verwenden spezieller Computer-Software. Oft erfolgt die Integration nur näherungsweise mittels sogenannter numerischer Quadratur.
In der Technik benutzt man zur näherungsweisen Flächenbestimmung sogenannte Planimeter, bei denen die Summierung der Flächenelemente kontinuierlich erfolgt. Der Zahlenwert der so bestimmten Fläche kann an einem Zählwerk abgelesen werden, das zur Erhöhung der Ablesegenauigkeit mit einem Nonius versehen ist. Chemiker pflegten früher Integrale beliebiger Flächen mit Hilfe einer Analysenwaage oder Mikrowaage zu bestimmen: Die Fläche wurde sorgfältig ausgeschnitten und gewogen, ebenso ein genau 10 cm × 10 cm großes Stück des gleichen Papiers; eine Dreisatzrechnung führte zum Ergebnis.
Geschichte


Flächenberechnungen werden seit der Antike
untersucht. Im 5. Jahrhundert vor Christus entwickelte Eudoxos von Knidos
nach einer Idee von Antiphon
die Exhaustionsmethode,
die darin bestand, Verhältnisse von Flächeninhalten mittels enthaltener oder
überdeckender Polygone abzuschätzen. Er
konnte durch diese Methode sowohl Flächeninhalte als auch Volumina einiger
einfacher Körper bestimmen. Archimedes
(287–212 v. Chr.) verbesserte diesen Ansatz, und so gelang ihm die exakte
Bestimmung des Flächeninhalts einer von einem Parabelbogen und
einer Sekante begrenzten Fläche ohne
Rückgriff auf den Grenzwertbegriff,
der damals noch nicht vorhanden war; dieses Ergebnis lässt sich leicht in das
heute bekannte Integral einer quadratischen Funktion umformen. Zudem schätzte er
das Verhältnis von Kreisumfang zu Durchmesser,  ,
als Wert zwischen
,
als Wert zwischen  und
und  ab.
ab.
Diese Methode wurde auch im Mittelalter benutzt. Im 17. Jahrhundert stellte Bonaventura Francesco Cavalieri das Prinzip von Cavalieri auf, wonach zwei Körper das gleiche Volumen haben, wenn alle parallelen ebenen Schnitte den gleichen Flächeninhalt haben. Johannes Kepler benutzte in seinem Werk Astronomia Nova (1609) bei der Berechnung der Marsbahn Methoden, die heute als numerische Integration bezeichnet werden würden. Er versuchte ab 1612, den Rauminhalt von Weinfässern zu berechnen. 1615 veröffentlichte er die Stereometria Doliorum Vinariorum („Stereometrie der Weinfässer“), später auch als keplersche Fassregel bekannt.
Ende des 17. Jahrhunderts gelang es Isaac Newton und Gottfried Wilhelm Leibniz unabhängig voneinander, Kalküle zur Differentialrechnung zu entwickeln und so den Fundamentalsatz der Analysis zu entdecken (zur Entdeckungsgeschichte und zum Prioritätsstreit siehe den Artikel Infinitesimalrechnung). Ihre Arbeiten erlaubten das Abstrahieren von rein geometrischer Vorstellung und werden deshalb als Beginn der Analysis betrachtet. Bekannt wurden sie vor allem durch das Buch des Adligen Guillaume François Antoine, Marquis de L’Hospital, der bei Johann I Bernoulli Privatunterricht nahm und dessen Forschung zur Analysis so publizierte. Der Begriff Integral geht auf Johann Bernoulli zurück.
Im 19. Jahrhundert wurde die gesamte Analysis auf ein solideres Fundament gestellt. 1823 entwickelte Augustin-Louis Cauchy erstmals einen Integralbegriff, der den heutigen Ansprüchen an Stringenz genügt. Später entstanden die Begriffe des Riemann-Integrals und des Lebesgue-Integrals. Schließlich folgte die Entwicklung der Maßtheorie Anfang des 20. Jahrhunderts.
Integral für kompakte Intervalle
„Kompakt“ bedeutet hier beschränkt und abgeschlossen, es werden also nur
Funktionen auf Intervallen
der Form ![[a,b]](/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935.svg) betrachtet. Offene oder unbeschränkte
Intervalle sind nicht zugelassen.
betrachtet. Offene oder unbeschränkte
Intervalle sind nicht zugelassen.
Motivation
Reduktion komplizierterer Flächeninhalte auf Integrale
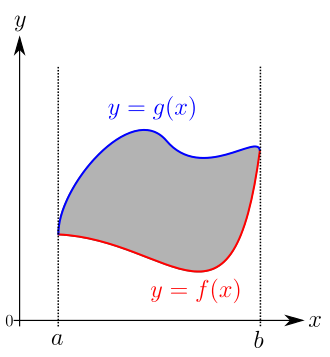
Ein Ziel der Integralrechnung ist die Berechnung von Flächeninhalten
krummlinig begrenzter Bereiche der Ebene. In den meisten in der Praxis
auftretenden Fällen sind derartige Flächen beschrieben durch zwei stetige Funktionen
 auf einem kompakten Intervall ,
deren Graphen die Fläche begrenzen (linkes Bild).
auf einem kompakten Intervall ,
deren Graphen die Fläche begrenzen (linkes Bild).
 :
:  :
: 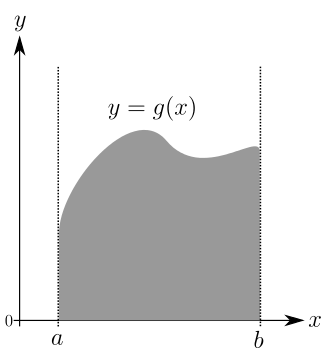
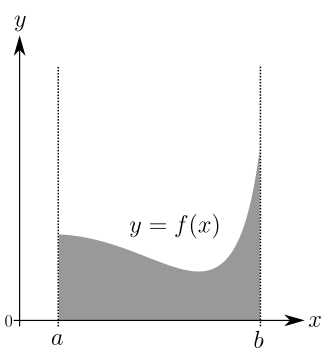
Der Flächeninhalt der grauen Fläche im linken Bild ist gleich der Differenz der grauen Bereiche in den beiden rechten Bildern. Es genügt also, sich auf den einfacheren Fall einer Fläche zu beschränken, die begrenzt wird von:
- dem Graphen einer Funktion
- zwei vertikalen Geraden
 und
und 
- sowie der -Achse.
Auf Grund seiner fundamentalen Bedeutung erhält dieser Typ Flächeninhalt eine spezielle Bezeichnung:
 ,
,
gelesen als Integral von
bis
über (oder: von)
von ,
 .
Der Faktor
wird heute im Allgemeinen als reiner Notationsbestandteil verwendet und steht
dabei für das Differential
auf der -Achse.
Statt
kann auch eine andere Variable, abgesehen von
und
gewählt werden, zum Beispiel
.
Der Faktor
wird heute im Allgemeinen als reiner Notationsbestandteil verwendet und steht
dabei für das Differential
auf der -Achse.
Statt
kann auch eine andere Variable, abgesehen von
und
gewählt werden, zum Beispiel  ,
was den Wert des Integrals nicht ändert.
,
was den Wert des Integrals nicht ändert.
Integrale negativer Funktionen
Verschiebt man den Graphen einer Funktion in Richtung der -Achse
um ein Stück  ,
so kommt zu der betrachteten Fläche ein Rechteck hinzu:
,
so kommt zu der betrachteten Fläche ein Rechteck hinzu:
- :
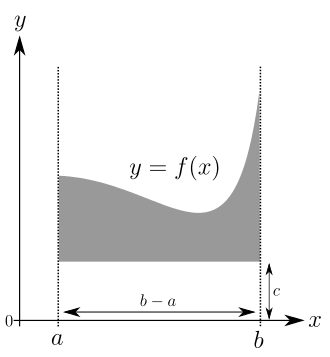
Das Integral ändert sich um den Flächeninhalt dieses Rechtecks der Breite
 und der Höhe ,
in Formeln
und der Höhe ,
in Formeln

Betrachtet man eine stetige Funktion, deren Werte negativ sind, so kann man
stets ein  finden, sodass die Werte
finden, sodass die Werte  im Intervall alle positiv sind (
muss größer als der Betrag des Minimums von
in
sein). Mit der vorhergehenden Überlegung erhält man
im Intervall alle positiv sind (
muss größer als der Betrag des Minimums von
in
sein). Mit der vorhergehenden Überlegung erhält man
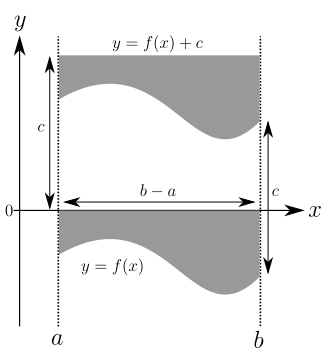

das heißt, das Integral von
ist die Differenz der Flächeninhalte des weißen Bereichs in der Mitte und dem
umgebenden Rechteck. Diese Differenz ist aber negativ, das heißt, soll
die obige Formel für beliebige Funktionen korrekt sein, so muss man Flächen
unterhalb der -Achse
negativ zählen. Man spricht deshalb von einem orientierten bzw.
gerichteten Flächeninhalt.
Wenn eine oder mehrere Nullstellen im zu untersuchenden Intervall vorliegen,
gibt das Integral nicht mehr den Flächeninhalt an, sondern die Summe aus den
(positiven) Flächeninhalten der Teilflächen oberhalb der -Achse
und den (negativen) Flächeninhalten der Teilflächen unterhalb der -Achse.
Benötigt man in einem solchen Intervall die Fläche zwischen -Achse
und Graph der Funktion, muss das Integral an den Nullstellen aufgeteilt werden.
Das Prinzip von Cavalieri und die Additivität des Integrals
Axiomatischer Zugang
Es ist nicht einfach, den Begriff des Flächeninhaltes mathematisch präzise zu fassen. Im Laufe der Zeit wurden dafür verschiedene Konzepte entwickelt. Für die meisten Anwendungen sind deren Details jedoch unerheblich, da sie unter anderem auf der Klasse der stetigen Funktionen übereinstimmen. Im Folgenden werden einige Eigenschaften des Integrals aufgelistet, die oben motiviert wurden und unabhängig von der genauen Konstruktion für jedes Integral gelten. Außerdem legen sie das Integral stetiger Funktionen eindeutig fest.
Es seien  reelle
Zahlen, und es sei
reelle
Zahlen, und es sei  ein Vektorraum von Funktionen
ein Vektorraum von Funktionen
![[a,b]\to\mathbb R](/svg/641f4ab7608607e1e61bd1958d0b9da424be1752.svg) ,
der die stetige
Funktionen umfasst. Funktionen in
werden „integrierbar“ genannt. Dann ist ein Integral eine Abbildung
,
der die stetige
Funktionen umfasst. Funktionen in
werden „integrierbar“ genannt. Dann ist ein Integral eine Abbildung

geschrieben

mit den folgenden Eigenschaften:
- Linearität: Für Funktionen
 und
und  gilt
gilt
 ,
, .
.
- Monotonie: Ist
 für alle
für alle ![x\in[a,b]](/svg/026357b404ee584c475579fb2302a4e9881b8cce.svg) ,
so ist
,
so ist
- Integral der charakteristischen
Funktion eines Intervalls: Ist
![I\subseteq[a,b]](/svg/72fcc00ca78273b67de4c0c755f666528788e161.svg) ein Intervall und ist
ein Intervall und ist

-
- so ist
- gleich der Länge des Intervalls
 .
.


Bezeichnungen
- Die reellen Zahlen
und
heißen Integrationsgrenzen. Sie können oberhalb und unterhalb des
Integralzeichens oder seitlich vom Integralzeichen geschrieben werden:
-
 oder
oder 
- Die zu integrierende Funktion
heißt Integrand.
- Die Variable
heißt Integrationsvariable. Ist
die Integrationsvariable, so spricht man auch von Integration über .
Die Integrationsvariable ist austauschbar, statt
-
- kann man genauso gut
 oder
oder 
- schreiben. In dem obigen Beispiel führt es zu unerwünschten
Mehrdeutigkeiten, wenn man die Buchstaben
oder
verwendet, da sie bereits als Bezeichner für die Integrationsgrenzen
fungieren. Daher sollte man darauf achten, dass das für die
Integrationsvariable verwendete Zeichen nicht schon mit einer anderen
Bedeutung belegt ist.
- Der Bestandteil „“
wird Differential
genannt, hat aber in diesem Kontext meist nur symbolische Bedeutung. Daher
wird hier nicht versucht, ihn zu definieren. Am Differential liest man die
Integrationsvariable ab.
Herkunft der Notation
Die symbolische Schreibweise von Integralen geht auf den Miterstbeschreiber
der Differential- und Integralrechnung, Gottfried Wilhelm
Leibniz, zurück. Das Integralzeichen
∫ ist aus dem Buchstaben langes s (ſ)
für lateinisch summa abgeleitet. Die multiplikativ zu lesende
Notation  deutet an, wie sich das Integral – dem Riemann-Integral folgend – aus
Streifen der Höhe
deutet an, wie sich das Integral – dem Riemann-Integral folgend – aus
Streifen der Höhe  und der infinitesimalen
Breite
zusammensetzt.
und der infinitesimalen
Breite
zusammensetzt.
Alternative Schreibweise in der Physik
In der theoretischen Physik wird aus pragmatischen Gründen oft eine leicht andere Schreibweise für Integrale benutzt (vor allem bei Mehrfachintegralen). Dort wird statt
oft

geschrieben, manchmal werden an verschiedenen Stellen sogar beide Schreibweisen benutzt.
Die zweite Schreibweise hat den Nachteil, dass die zu integrierende Funktion
nicht mehr durch  und
eingeklammert wird. Zudem können Missverständnisse zum Beispiel beim Lebesgue-Integral
auftreten. Die alternative Schreibweise hat jedoch auch einige Vorzüge:
und
eingeklammert wird. Zudem können Missverständnisse zum Beispiel beim Lebesgue-Integral
auftreten. Die alternative Schreibweise hat jedoch auch einige Vorzüge:
- Der Ausdruck
 hebt hervor, dass das Integral ein linearer
Operator ist, der auf alles rechts von ihm wirkt.
hebt hervor, dass das Integral ein linearer
Operator ist, der auf alles rechts von ihm wirkt. - Oft tauchen in der Physik Integrale auf, bei denen die zu integrierende
Funktion mehrere Zeilen lang ist oder es wird über mehrere Unbekannte
 integriert. Dann weiß man bei der Schreibweise
integriert. Dann weiß man bei der Schreibweise  schon zu Beginn des Integrals, welche Variablen überhaupt und über welche
Grenzen integriert werden. Ferner ist dann die Zuweisung von Variablen zu
Grenzen einfacher.
schon zu Beginn des Integrals, welche Variablen überhaupt und über welche
Grenzen integriert werden. Ferner ist dann die Zuweisung von Variablen zu
Grenzen einfacher. - Die Kommutativität der Produkte bei den in der Riemann’schen Näherung
auftretenden Summanden
 wird betont.
wird betont.
Beispiel:

statt

Einfache Folgerungen aus den Axiomen
- Ist
 für alle
für alle  ,
so ist
,
so ist

- Bezeichnet man mit
 die Supremumsnorm
von
auf ,
so gilt
die Supremumsnorm
von
auf ,
so gilt

- Ist
 für alle
mit einer festen Zahl
für alle
mit einer festen Zahl  ,
so gilt
,
so gilt
-
- Daraus folgt: Ist
 eine Folge von integrierbaren Funktionen, die gleichmäßig
gegen eine (integrierbare) Funktion
konvergiert, so ist
eine Folge von integrierbaren Funktionen, die gleichmäßig
gegen eine (integrierbare) Funktion
konvergiert, so ist
- Mit anderen Worten: Das Integral ist ein stetiges Funktional für die Supremumsnorm.


- Integrale von Treppenfunktionen: Ist
eine Treppenfunktion,
das heißt, ist
eine disjunkte
Vereinigung von Intervallen
 der Längen
der Längen  ,
sodass
auf
konstant mit Wert
,
sodass
auf
konstant mit Wert  ist, so gilt
ist, so gilt
-
- also anschaulich gleich der Summe der orientierten Flächeninhalte der
Rechtecke zwischen dem Funktionsgraphen von
und der -Achse.

Stammfunktionen und der Hauptsatz der Differential- und Integralrechnung
Die Integration ist eine nicht-eindeutige Umkehrung der Differentiation. Um
dies zu präzisieren, wird der Begriff der Stammfunktion
benötigt: Ist
eine Funktion, so heißt eine Funktion  eine Stammfunktion von ,
wenn die Ableitung
von
gleich
ist:
eine Stammfunktion von ,
wenn die Ableitung
von
gleich
ist:

Nicht-eindeutig ist diese Umkehrung, weil verschiedene Funktionen (z. B. Polynomfunktionen, die sich nur im Y-Achsenabschnitt unterscheiden) ein und dieselbe Ableitung haben können, was dazu führt, dass eine Funktion nicht nur eine, sondern unendlich viele Stammfunktionen hat.
Der Hauptsatz
der Differential- und Integralrechnung stellt die Beziehung zwischen
Stammfunktionen und Integralen her. Er besagt: Ist
eine stetige
Funktion auf einem Intervall
und ist
eine Stammfunktion von ,
so gilt
 /DD>
/DD>
Die rechte Seite wird oft abkürzend als
![[F(x)]_a^b = [F(x)]_{x=a}^{x=b} = F(x)\Big|_a^b = F(x)\Big|_{x=a}^{x=b}](/svg/17e259ce717aa5cfb33ad913b3921a9873eef27e.svg) oder Ähnliches
oder Ähnliches
geschrieben.
Dieser Zusammenhang ist die hauptsächliche Methode zur expliziten Auswertung von Integralen. Die Schwierigkeit liegt meist im Auffinden einer Stammfunktion.
Die bloße Existenz ist theoretisch gesichert: Die Integralfunktion

ist für jedes
eine Stammfunktion von .
Eigenschaften von Stammfunktionen
Man kann zu einer Stammfunktion eine Konstante addieren und erhält wieder
eine Stammfunktion: Ist
eine Stammfunktion zu einer Funktion
und ist
eine Konstante, so ist

Zwei Stammfunktionen derselben auf einem Intervall definierten Funktion
unterscheiden sich um eine Konstante: Sind
und  Stammfunktionen derselben Funktion ,
so ist
Stammfunktionen derselben Funktion ,
so ist

also ist die Differenz  eine Konstante. Ist der Definitionsbereich
von
kein Intervall, so ist die Differenz zweier Stammfunktionen lediglich lokal
konstant.
eine Konstante. Ist der Definitionsbereich
von
kein Intervall, so ist die Differenz zweier Stammfunktionen lediglich lokal
konstant.
Unbestimmtes Integral
Eine Stammfunktion wird auch als unbestimmtes Integral von
bezeichnet – manchmal ist damit aber auch die Menge aller Stammfunktionen
gemeint. Ist  eine Stammfunktion, so schreibt man häufig unpräzise
eine Stammfunktion, so schreibt man häufig unpräzise

um anzudeuten, dass jede Stammfunktion von
die Form  mit einer Konstante
mit einer Konstante  hat. Die Konstante
heißt Integrationskonstante.
hat. Die Konstante
heißt Integrationskonstante.
Man beachte, dass die Schreibweise

jedoch auch häufig in Formeln benutzt wird, um anzudeuten, dass Gleichungen für beliebige, konsistent gewählte Grenzen gelten; beispielsweise ist mit

gemeint, dass

für beliebige  gilt.
gilt.
Bestimmung von Stammfunktionen
Siehe dazu den Artikel: Tabelle von Ableitungs- und Stammfunktionen oder unbestimmte Integrale in der Formelsammlung Mathematik
Im Gegensatz zur Ableitungsfunktion ist die explizite Berechnung einer Stammfunktion bei vielen Funktionen sehr schwierig oder nicht möglich. Oft schlägt man Integrale deshalb in Tabellenwerken (z.B. einer Integraltafel) nach. Zur manuellen Berechnung einer Stammfunktion ist häufig die geschickte Anwendung der folgenden Standardtechniken hilfreich.
Partielle Integration
Die partielle Integration ist die Umkehrung der Produktregel der Differentialrechnung. Sie lautet:
![{\displaystyle \int _{a}^{b}f'(x)\cdot g(x)\,\mathrm {d} x=[f(x)\cdot g(x)]_{a}^{b}-\int _{a}^{b}f(x)\cdot g'(x)\,\mathrm {d} x}](/svg/dfa27671d0c0ebe5340f6f922210950b4ec7d939.svg)
Diese Regel ist dann von Vorteil, wenn die Funktion  einfacher als die Funktion
einfacher als die Funktion  zu integrieren ist. Hierbei sind jedoch die Produkte und nicht die Faktoren
selbst zu bewerten.
zu integrieren ist. Hierbei sind jedoch die Produkte und nicht die Faktoren
selbst zu bewerten.
Beispiel:

Setzt man
 und
und 
so ist
 und
und 
und man erhält

Integration durch Substitution
Die Substitutionsregel ist ein wichtiges Hilfsmittel, um einige schwierige Integrale zu berechnen, da sie bestimmte Änderungen der zu integrierenden Funktion bei gleichzeitiger Änderung der Integrationsgrenzen erlaubt. Sie ist das Gegenstück zur Kettenregel in der Differentialrechnung.
Sei  mit
mit  und
eine Stammfunktion von ,
so ist
und
eine Stammfunktion von ,
so ist  eine Stammfunktion von
eine Stammfunktion von  ,
denn es gilt
,
denn es gilt

und mit der Substitution

schließlich

Umformung durch Partialbruchzerlegung
Bei gebrochenrationalen Funktionen führt häufig eine Polynomdivision oder eine Partialbruchzerlegung zu einer Umformung der Funktion, die es erlaubt, eine der Integrationsregeln anzuwenden.
Spezielle Verfahren
Oft ist es möglich, unter Ausnutzung der speziellen Form des Integranden die Stammfunktion zu bestimmen.
Eine weitere Möglichkeit besteht darin, bei einem bekannten Integral zu beginnen und dieses durch Integrationstechniken solange umzuformen, bis das gewünschte Integral entsteht. Beispiel:
Um  zu bestimmen, integrieren wir das folgende ähnliche Integral partiell:
zu bestimmen, integrieren wir das folgende ähnliche Integral partiell:

Durch Umstellen folgt

Anwendungen
Mittelwerte stetiger Funktionen
Um den Mittelwert  einer gegebenen stetige
Funktion
auf einem Intervall
zu berechnen, benutzt man die Formel
einer gegebenen stetige
Funktion
auf einem Intervall
zu berechnen, benutzt man die Formel

Da diese Definition für Treppenfunktionen mit dem üblichen Mittelwertbegriff übereinstimmt, ist diese Verallgemeinerung sinnvoll.
Der Mittelwertsatz
der Integralrechnung besagt, dass dieser Mittelwert von einer stetigen
Funktion im Intervall
auch tatsächlich angenommen wird.
Beispiel für den Integralbegriff in der Physik
Ein physikalisches Phänomen,
an dem der Integralbegriff erklärt werden kann, ist der freie Fall eines Körpers im Schwerefeld der Erde. Die Beschleunigung  des freien Falls in Mitteleuropa beträgt ca.
9,81 m/s². Die Geschwindigkeit
des freien Falls in Mitteleuropa beträgt ca.
9,81 m/s². Die Geschwindigkeit
 eines Körpers zur Zeit
lässt sich daher durch die Formel
eines Körpers zur Zeit
lässt sich daher durch die Formel

ausdrücken.
Nun soll aber die Wegstrecke  berechnet werden, die der fallende Körper innerhalb einer bestimmten Zeit
berechnet werden, die der fallende Körper innerhalb einer bestimmten Zeit  zurücklegt. Das Problem hierbei ist, dass die Geschwindigkeit
des Körpers mit der Zeit zunimmt. Um das Problem zu lösen, nimmt man an, dass
für eine kurze Zeitspanne
zurücklegt. Das Problem hierbei ist, dass die Geschwindigkeit
des Körpers mit der Zeit zunimmt. Um das Problem zu lösen, nimmt man an, dass
für eine kurze Zeitspanne  die Geschwindigkeit ,
die sich aus der Zeit
die Geschwindigkeit ,
die sich aus der Zeit  ergibt, konstant bleibt.
ergibt, konstant bleibt.
Die Zunahme der Wegstrecke innerhalb des kurzen Zeitraums
beträgt daher
 .
.
Die gesamte Wegstrecke lässt sich daher als

ausdrücken. Wenn man nun die Zeitdifferenz
gegen Null streben lässt, erhält man

Das Integral lässt sich analytisch angeben mit

Die allgemeine Lösung führt zur Bewegungsgleichung des im konstanten Schwerefeld fallenden Körpers:

Weiter lässt sich aus dieser Bewegungsgleichung durch Differenzieren nach der Zeit die Gleichung für die Geschwindigkeit:
und durch nochmaliges Differenzieren für die Beschleunigung herleiten:

Weitere einfache Beispiele sind:
- Die Energie ist das Integral der Leistung über die Zeit.
- Die elektrische Ladung eines Kondensators ist das Integral des durch ihn fließenden Stromes über die Zeit.
- Das Integral des Produktes der spektralen Bestrahlungsstärke (Ee(ν) in W/m2Hz) mit der spektralen Hellempfindlichkeitskurve des Auges liefert die Beleuchtungsstärke (E in Lux = Lumen/m2).
- Das Integral der Strömungsgeschwindigkeit (Längskomponente) über den Querschnitt eines Rohres liefert den gesamten Volumenstrom durch das Rohr (weitere mehrdimensionale Integrale siehe unten).
Konstruktionen
Cauchy-Integral

(1789–1857)
Eine Regelfunktion
ist eine Funktion, die sich gleichmäßig durch Treppenfunktionen approximieren lässt.
Aufgrund der erwähnten Kompatibilität des Integrals mit gleichmäßigen Limites
kann man für eine Regelfunktion ,
die gleichmäßiger Limes einer Folge  von Treppenfunktionen ist, das Integral definieren als
von Treppenfunktionen ist, das Integral definieren als

wobei das Integral für Treppenfunktionen durch die oben angegebene Formel definiert wird.
Die Klasse der Regelfunktionen umfasst alle stetigen Funktionen und alle monotonen
Funktionen, ebenso alle Funktionen ,
für die sich
in endlich viele Intervalle
unterteilen lässt, sodass die Einschränkung
von
auf
eine stetige oder monotone Funktion auf dem abgeschlossenen Intervall  ist, d.h. alle stückweise stetigen Funktionen. Sie umfasst außerdem Funktionen
von beschränkter Variation, da sich so eine Funktion als Differenz zweier
monoton steigender Funktionen darstellen lässt. Für viele praktische Zwecke ist
diese Integralkonstruktion völlig ausreichend.
ist, d.h. alle stückweise stetigen Funktionen. Sie umfasst außerdem Funktionen
von beschränkter Variation, da sich so eine Funktion als Differenz zweier
monoton steigender Funktionen darstellen lässt. Für viele praktische Zwecke ist
diese Integralkonstruktion völlig ausreichend.
Es gibt auch stetige Funktionen mit unendlicher Variation wie
z.B. die durch  und
und  für
für  auf dem Intervall
auf dem Intervall ![[0,1]](/svg/738f7d23bb2d9642bab520020873cccbef49768d.svg) definierte Funktion (siehe Variation).
definierte Funktion (siehe Variation).
Riemann-Integral

(1826–1866)
Ein Ansatz zur Berechnung des Integrals nach Riemann ist die Approximation der zu integrierenden Funktion durch eine Treppenfunktion; allerdings nicht durch gleichmäßige Approximation der Funktion selbst, sondern durch Approximation des Flächeninhalts durch Rechtecksummen.
Die Fläche wird durch die Summe der Flächeninhalte der einzelnen Rechtecke unter den einzelnen „Treppenstufen“ angenähert. Zu jeder Zerlegung des Integrationsintervalls kann man dazu einen beliebigen Funktionswert innerhalb jedes Teilintervalls als Höhe der Stufe wählen.
Dies sind die nach dem deutschen Mathematiker Bernhard Riemann bezeichneten Riemann-Summen. Wählt man in jedem Teilintervall der Zerlegung gerade das Supremum der Funktion als Höhe des Rechtecks, so ergibt sich die Obersumme, mit dem Infimum die Untersumme.
Das Riemannsche Integral lässt sich mit Hilfe von Ober- und Untersummen definieren, siehe Riemannsches Integral. Konvergieren Ober- und Untersummen gegen den gleichen Grenzwert, so ist dieser Grenzwert das Integral im Sinne von Riemann. Integrierbar in diesem Sinne sind z.B. sämtliche Funktionen, für die das Cauchy-Integral existiert.
Das Riemann-Integral existiert z.B. nicht für die Indikatorfunktion der
rationalen Zahlen im Intervall ,
d.h. für die Dirichlet-Funktion.
Deshalb wurden erweiterte Integralbegriffe von Henri Léon
Lebesgue (Lebesgue-Integral),
Thomas
Jean Stieltjes (Stieltjesintegral)
und Alfréd Haar
eingeführt, die für stetige Integranden das Riemann-Integral reproduzieren.
Stieltjes-Integral
Beim Stieltjes-Integral geht man von monotonen Funktionen  aus, oder von solchen mit endlicher
Variation, das sind Differenzen von zwei monotonen Funktionen, und definiert
für stetige Funktionen
Riemann-Stieltjes’sche Summen als
aus, oder von solchen mit endlicher
Variation, das sind Differenzen von zwei monotonen Funktionen, und definiert
für stetige Funktionen
Riemann-Stieltjes’sche Summen als

Durch Limesbildung in der üblichen Weise erhält man dann das sogenannte
Riemann-Stieltjes-Integral  .
.
Solche Integrale sind auch dann definiert, wenn die Funktion
nicht differenzierbar ist (andernfalls gilt  ).
Ein bekanntes Gegenbeispiel ist die sogenannte Heaviside-Funktion
).
Ein bekanntes Gegenbeispiel ist die sogenannte Heaviside-Funktion
 ,
deren Wert gleich Null für die negativen Zahlen, Eins für positive
und z.B.
,
deren Wert gleich Null für die negativen Zahlen, Eins für positive
und z.B.  für den Punkt
für den Punkt  ist. Man schreibt, für
ist. Man schreibt, für 
 und erhält so die „verallgemeinerte
Funktion“
und erhält so die „verallgemeinerte
Funktion“  ,
das sogenannte Diracmaß,
als ein nur für den Punkt
definiertes Maß.
,
das sogenannte Diracmaß,
als ein nur für den Punkt
definiertes Maß.
Lebesgue-Integral

Einen moderneren und – in vielerlei Hinsicht – besseren Integralbegriff als den des Riemann’schen Integrals liefert das Lebesgue-Integral. Es erlaubt zum Beispiel die Integration über allgemeine Maßräume. Das bedeutet, dass man Mengen ein Maß zuordnen kann, das nicht notwendig mit ihrer geometrischen Länge bzw. ihrem Rauminhalt übereinstimmen muss, so zum Beispiel Wahrscheinlichkeitsmaße in der Wahrscheinlichkeitstheorie. Das Maß, das dem intuitiven Längen- bzw. Volumenbegriff entspricht, ist das Lebesgue-Maß. In der Regel wird das Integral über dieses Maß als Lebesgue-Integral bezeichnet. Man kann beweisen, dass für jede Funktion, die über einem kompakten Intervall Riemann-integrierbar ist, auch das entsprechende Lebesgue-Integral existiert und die Werte beider Integrale übereinstimmen. Umgekehrt sind aber nicht alle Lebesgue-integrierbaren Funktionen auch Riemann-integrierbar. Das bekannteste Beispiel dafür ist die Dirichlet-Funktion, also die Funktion, die für rationale Zahlen den Wert Eins, aber für irrationale Zahlen den Wert Null hat. Neben der größeren Klasse an integrierbaren Funktionen zeichnet sich das Lebesgue-Integral gegenüber dem Riemann-Integral vor allem durch die besseren Konvergenzsätze aus (Satz von der monotonen Konvergenz, Satz von der majorisierten Konvergenz) und die besseren Eigenschaften der durch das Lebesgue-Integral normierten Funktionenräume (etwa Vollständigkeit).
In der modernen Mathematik versteht man unter Integral oder Integrationstheorie häufig den lebesgueschen Integralbegriff.
Uneigentliches Integral
Das Riemann-Integral ist (im eindimensionalen Raum) nur für kompakte, also beschränkte und abgeschlossene, Intervalle definiert. Eine Verallgemeinerung auf unbeschränkte Definitionsbereiche oder Funktionen mit Singularitäten bietet das uneigentliche Integral. Auch in der Lebesgue-Theorie können uneigentliche Integrale betrachtet werden, jedoch ist dies nicht so ergiebig, da man mit dem Lebesgue-Integral schon viele Funktionen mit Singularitäten oder unbeschränktem Definitionsbereich integrieren kann.
Verfahren zur Berechnung bestimmter und uneigentlicher Integrale
Numerische Verfahren
Oft ist es schwierig oder nicht möglich, eine Stammfunktion explizit anzugeben. Allerdings reicht es in vielen Fällen auch aus, das bestimmte Integral näherungsweise zu berechnen. Man spricht dann von numerischer Quadratur oder numerischer Integration. Viele Verfahren zur numerischen Quadratur bauen auf einer Approximation der Funktion durch einfacher integrierbare Funktionen auf, zum Beispiel durch Polynome. Die Trapezregel oder auch die simpsonsche Formel (deren Spezialfall als keplersche Fassregel bekannt ist) sind Beispiele dafür, hier wird durch die Funktion ein Interpolationspolynom gelegt und dann integriert.
Bereits lange vor der Verbreitung von Computern wurden für die numerische Integration Verfahren zur automatischen Schrittweitensteuerung entwickelt. Heute bietet die Computeralgebra die Möglichkeit, komplexe Integrale numerisch in immer kürzeren Zeiten bzw. immer genauer zu lösen, wobei auch bei leistungsfähigen Systemen noch Schwierigkeiten bei uneigentlichen Integralen bestehen, für deren Berechnung oft spezielle Verfahren wie Gauß-Kronrod angewendet werden müssen. Ein Beispiel für ein solches hartes Integral ist:

Klassische Verfahren sind z.B. die Eulersche Summenformel, bei der das bestimmte Integral durch eine im Allgemeinen asymptotische Reihe approximiert wird. Weitere Methoden basieren auf der Theorie der Differenzenrechnung, als wichtiges Beispiel ist hier die Gregorysche Integrationsformel zu nennen.
Exakte Verfahren


Es gibt eine Reihe von Verfahren, mit denen bestimmte und uneigentliche Integrale exakt in symbolischer Form berechnet werden können.
Falls
stetig und zu
eine Stammfunktion
bekannt ist, lässt sich das bestimmte Integral

durch den Hauptsatz berechnen. Problematisch ist, dass die Operation des
unbestimmten Integrierens zu einer Erweiterung vorgegebener Funktionsklassen
führt. Z.B. ist das Integrieren innerhalb der Klasse der rationalen
Funktionen nicht abgeschlossen und führt auf die Funktionen  und
und  .
Auch die Klasse der so genannten elementaren
Funktionen ist nicht abgeschlossen. So hat Joseph
Liouville bewiesen, dass die Funktion
.
Auch die Klasse der so genannten elementaren
Funktionen ist nicht abgeschlossen. So hat Joseph
Liouville bewiesen, dass die Funktion  keine elementare Stammfunktion besitzt. Leonhard
Euler war einer der ersten, die Methoden zur exakten Berechnung bestimmter
und uneigentlicher Integrale ohne Bestimmung einer Stammfunktion entwickelten.
Im Laufe der Zeit sind zahlreiche allgemeinere und speziellere Methoden zur
bestimmten Integration entstanden:
keine elementare Stammfunktion besitzt. Leonhard
Euler war einer der ersten, die Methoden zur exakten Berechnung bestimmter
und uneigentlicher Integrale ohne Bestimmung einer Stammfunktion entwickelten.
Im Laufe der Zeit sind zahlreiche allgemeinere und speziellere Methoden zur
bestimmten Integration entstanden:
- Benutzung des Residuensatzes
- Darstellung des von einem Parameter abhängigen Integrals durch spezielle Funktionen
- Differentiation oder Integration des Integrals nach einem Parameter und Vertauschung der Grenzprozesse
- Benutzung einer Reihenentwicklung des Integranden mit gliedweiser Integration
- durch partielle Integration und Substitution das Integral auf sich selbst oder ein anderes zurückführen
Bis zum Ende des 20. Jahrhunderts sind zahlreiche (teils mehrbändige) Integraltafeln mit bestimmten Integralen entstanden. Zur Illustration der Problematik einige Beispiele:


Besondere Integrale
Es gibt eine Reihe von bestimmten und uneigentlichen Integralen, die eine gewisse Bedeutung für die Mathematik haben und daher einen eigenen Namen tragen:
- Eulersche Integrale erster und zweiter Art
- Gaußsches Fehlerintegral


- Raabesches Integral
 und speziell für
und speziell für  und
und  :
:

- Frullanische Integrale

Mehrdimensionale Integration
Wegintegrale
Reelle Wegintegrale und Länge einer Kurve
Ist ![\gamma \colon [a,b]\to \mathbb {R} ^{n}](/svg/3949e127cdd1af020b06369df1a0b89d588f0fdf.svg) ein Weg,
also eine stetige Abbildung, und
ein Weg,
also eine stetige Abbildung, und  eine skalare Funktion, so ist das Wegintegral von
entlang
eine skalare Funktion, so ist das Wegintegral von
entlang  definiert als
definiert als

Ist  ,
so erhalten wir aus der obigen Formel die Länge der Kurve
,
so erhalten wir aus der obigen Formel die Länge der Kurve ![\gamma\colon[a,b]\to\mathbb R^2](/svg/2c2c00124194b1c0af00f122fc292b24614cb002.svg) (physikalisch gesprochen) als das Integral der Geschwindigkeit über die Zeit:
(physikalisch gesprochen) als das Integral der Geschwindigkeit über die Zeit:

Reelle Wegintegrale für vektorielle Funktionen
In der Physik werden häufig Wegintegrale der folgenden Form verwendet:  ist eine Vektorfunktion
ist eine Vektorfunktion  ,
und es wird das Integral
,
und es wird das Integral

betrachtet, wobei der Ausdruck in den gewinkelten Klammern ein Skalarprodukt darstellt.
Komplexe Wegintegrale
In der Funktionentheorie, also der Erweiterung der Analysis auf Funktionen einer komplexen Veränderlichen, genügt es nicht mehr, untere und obere Integrationsgrenzen anzugeben. Zwei Punkte der komplexen Ebene können, anders als zwei Punkte auf der Zahlengeraden, durch viele Wege miteinander verbunden werden. Deshalb ist das bestimmte Integral in der Funktionentheorie grundsätzlich ein Wegintegral. Für geschlossene Wege gilt der Residuensatz, ein wichtiges Resultat von Cauchy: Das Integral einer meromorphen Funktion entlang eines geschlossenen Weges hängt allein von der Anzahl der umschlossenen Singularitäten ab. Es ist Null, falls sich im Integrationsgebiet keine Singularitäten befinden.
Oberflächenintegrale
Beispiel: Berechnung von Rauminhalten
Als Beispiel wird das Volumen
zwischen dem Graphen der Funktion  mit
mit  über dem Einheitsquadrat
über dem Einheitsquadrat
![I := [0,1]\times[0,1]](/svg/3b4fea8d3bf8559a8599694bc97e015b276b3458.svg) berechnet. Dazu teilt man das Integral über
auf zwei Integrale auf, eines für die -
und eines für die -Koordinate:
berechnet. Dazu teilt man das Integral über
auf zwei Integrale auf, eines für die -
und eines für die -Koordinate:
![{\displaystyle {\begin{aligned}\int _{[0,1]\times [0,1]}f(x,y)\,\mathrm {d} (x,y)&=\int _{0}^{1}\int _{0}^{1}f(x,y)\,\mathrm {d} x\,\mathrm {d} y=\int _{0}^{1}\int _{0}^{1}(x^{2}+y)\,\mathrm {d} x\,\mathrm {d} y\\&=\int _{0}^{1}\left[{\tfrac {1}{3}}x^{3}+yx\right]_{x=0}^{1}\,\mathrm {d} y=\int _{0}^{1}\left({\tfrac {1}{3}}+y\right)\mathrm {d} y=\left[{\tfrac {1}{3}}y+{\tfrac {1}{2}}y^{2}\right]_{y=0}^{1}={\tfrac {5}{6}}\end{aligned}}}](/svg/8fc1c4a176b26997109fd56fc32d8f792f06ce29.svg)
Für
ergibt das Oberflächenintegral den Flächeninhalt der Integrationsfläche.
Volumenintegrale
Für
berechnet das Volumenintegral den Volumeninhalt des Integrationsbereiches.
Integration über mehr- und höherdimensionale Bereiche
Den Integralbegriff kann man auf den Fall verallgemeinern, dass die
Trägermenge, auf der der Integrand
operiert, nicht die Zahlengerade  ,
sondern der
,
sondern der  -dimensionale
euklidische
Raum
-dimensionale
euklidische
Raum  ist.
ist.
Satz von Fubini und Transformationssatz
Für mehrdimensionale Integrale, also auch Flächen- und Volumenintegrale, findet der Satz von Fubini Anwendung, der es erlaubt, die Integrale in beliebiger Reihenfolge über die einzelnen Koordinaten aufzuspalten und sie nacheinander abzuarbeiten:

Die Integrationsgrenzen der eindimensionalen Integrale in ,
und  muss man aus der Begrenzung des Volumens
muss man aus der Begrenzung des Volumens  ermitteln. Analog zu den uneigentlichen Integralen im Eindimensionalen (siehe
oben) kann man aber auch Integrale über den gesamten, unbeschränkten -dimensionalen
Raum betrachten.
ermitteln. Analog zu den uneigentlichen Integralen im Eindimensionalen (siehe
oben) kann man aber auch Integrale über den gesamten, unbeschränkten -dimensionalen
Raum betrachten.
Die Verallgemeinerung der Substitutionsregel im Mehrdimensionalen ist der Transformationssatz.
Sei  offen und
offen und  eine injektive,
stetig
differenzierbare Abbildung, für deren Funktionaldeterminante
eine injektive,
stetig
differenzierbare Abbildung, für deren Funktionaldeterminante
 für alle
für alle  gilt. Dann ist
gilt. Dann ist

Integrale über Mannigfaltigkeiten
Insbesondere in vielen physikalischen Anwendungen ist die Integration über die Oberfläche eines Gebiets interessant. Solche Oberflächen werden üblicherweise durch Mannigfaltigkeiten beschrieben. Diese werden durch sogenannte Karten beschrieben.
Integration über ein Kartengebiet
Sei  eine
eine  -dimensionale
Untermannigfaltigkeit
des
und
-dimensionale
Untermannigfaltigkeit
des
und  ein Kartengebiet in ,
also eine offene Teilmenge in ,
für die es eine Karte gibt, die sie diffeomorph
auf eine offene Teilmenge des
ein Kartengebiet in ,
also eine offene Teilmenge in ,
für die es eine Karte gibt, die sie diffeomorph
auf eine offene Teilmenge des  abbildet. Ferner sei
abbildet. Ferner sei  eine Parametrisierung von ,
also eine stetig differenzierbare Abbildung, deren Ableitung vollen Rang hat,
die
eine Parametrisierung von ,
also eine stetig differenzierbare Abbildung, deren Ableitung vollen Rang hat,
die  homöomorph
auf
homöomorph
auf  abbildet. Dann ist das Integral einer Funktion auf dem Kartengebiet
folgendermaßen definiert:
abbildet. Dann ist das Integral einer Funktion auf dem Kartengebiet
folgendermaßen definiert:

wobei  die Gramsche
Determinante ist. Das rechte Integral kann mit den oben beschriebenen
Methoden der mehrdimensionalen Integration ausgerechnet werden. Die Gleichheit
folgt im Wesentlichen aus dem Transformationssatz.
die Gramsche
Determinante ist. Das rechte Integral kann mit den oben beschriebenen
Methoden der mehrdimensionalen Integration ausgerechnet werden. Die Gleichheit
folgt im Wesentlichen aus dem Transformationssatz.
Integration über eine Untermannigfaltigkeit
Ist eine Zerlegung der 1 gegeben, die mit den Karten der Untermannigfaltigkeit verträglich ist, kann einfach getrennt über die Kartengebiete integriert und aufsummiert werden.
Der gaußsche Integralsatz und der Satz von Stokes
Für spezielle Funktionen lassen sich die Integrale über Untermannigfaltigkeiten einfacher ausrechnen. In der Physik besonders wichtig sind hierbei zwei Aussagen:
Zum einen der gaußsche
Integralsatz, nach dem das Volumenintegral über die Divergenz
eines Vektorfeldes gleich dem Oberflächenintegral über das Vektorfeld (dem
Fluss des Feldes durch
die Oberfläche) ist: Sei  kompakt mit
abschnittsweise glattem Rand
kompakt mit
abschnittsweise glattem Rand  .
Der Rand sei orientiert durch ein äußeres Normalen-Einheitsfeld
.
Der Rand sei orientiert durch ein äußeres Normalen-Einheitsfeld  .
Sei ferner
.
Sei ferner  ein stetig
differenzierbares Vektorfeld auf einer offenen Umgebung von .
Dann gilt
ein stetig
differenzierbares Vektorfeld auf einer offenen Umgebung von .
Dann gilt

mit der Abkürzung  .
.
Durch diesen Satz wird die Divergenz als sogenannte Quellendichte des
Vektorfeldes interpretiert. Durch die Indizes  bzw.
bzw.  am
am  -Operator
wird die Dimension der jeweiligen Integrationsmannigfaltigkeit zusätzlich
betont.
-Operator
wird die Dimension der jeweiligen Integrationsmannigfaltigkeit zusätzlich
betont.
Bei expliziter Verwendung von Mehrfachintegralen wird (unter Verzicht auf die
Indizierung) für  :
:

Also: Das Integral der Divergenz über das gesamte Volumen ist gleich dem Integral des Flusses aus der Oberfläche.
Zum zweiten der Satz von Stokes, der eine Aussage der Differentialgeometrie ist und sich im Spezialfall des dreidimensionalen Raums direkt mit Mehrfachintegralen schreiben lässt.
Ist
eine zweidimensionale Untermannigfaltigkeit des dreidimensionalen euklidischen Raumes
 ,
so gilt
,
so gilt

wobei  die Rotation
des Vektorfeldes
bezeichnet.
die Rotation
des Vektorfeldes
bezeichnet.
Durch diesen Satz wird die Rotation eines Vektorfeldes als sogenannte
Wirbeldichte des Vektorfeldes interpretiert; dabei ist  der dreikomponentige Vektor
der dreikomponentige Vektor  und der Rand
und der Rand  von
eine geschlossene Kurve im .
von
eine geschlossene Kurve im .
Integration von vektorwertigen Funktionen
Die Integration von Funktionen, die nicht reell- oder komplexwertig sind, sondern Werte in einem allgemeineren Vektorraum annehmen, ist ebenfalls auf verschiedenste Arten möglich.
Die direkte Verallgemeinerung des Lebesgue-Integrals auf Banachraum-wertige Funktionen ist das Bochner-Integral (nach Salomon Bochner). Viele Ergebnisse der eindimensionalen Theorie übertragen sich dabei wortwörtlich auf Banachräume.
Auch die Definition des Riemann-Integrals mittels Riemann’scher Summen auf
vektorwertige Funktionen ![f \colon [a,b]\to V](/svg/399c8bb3fb0ac13907d31c511309a43496054720.svg) zu übertragen, fällt nicht schwer. Ein entscheidender Unterschied ist hierbei
jedoch, dass dann nicht mehr jede Riemann-integrierbare Funktion
Bochner-integrierbar ist.
zu übertragen, fällt nicht schwer. Ein entscheidender Unterschied ist hierbei
jedoch, dass dann nicht mehr jede Riemann-integrierbare Funktion
Bochner-integrierbar ist.
Eine gemeinsame Verallgemeinerung des Bochner- und Riemann-Integrals, die diesen Mangel behebt, ist das McShane-Integral, das sich am einfachsten über verallgemeinerte Riemann’sche Summen definieren lässt.
Auch das Birkhoff-Integral ist eine gemeinsame Verallgemeinerung des Bochner- und Riemann-Integrals. Im Gegensatz zum McShane-Integral benötigt die Definition des Birkhoff-Integrals jedoch keine topologische Struktur im Definitionsbereich der Funktionen. Sind jedoch die Voraussetzungen für die McShane-Integration erfüllt, so ist jede Birkhoff-integrierbare Funktion auch McShane-integrierbar.
Außerdem ist noch das Pettis-Integral
als nächster Verallgemeinerungsschritt erwähnenswert. Es nutzt eine
funktionalanalytische Definition, bei der die Integrierbarkeit auf den
eindimensionalen Fall zurückgeführt wird: Sei dafür  ein Maßraum. Eine Funktion
ein Maßraum. Eine Funktion
 heißt dabei Pettis-integrierbar, wenn für jedes stetige Funktional
heißt dabei Pettis-integrierbar, wenn für jedes stetige Funktional  die Funktion
die Funktion  Lebesgue-integrierbar ist und für jede messbare Menge
Lebesgue-integrierbar ist und für jede messbare Menge  ein Vektor
ein Vektor  existiert, sodass
existiert, sodass

gilt. Der Vektor  wird dann passenderweise mit
wird dann passenderweise mit  bezeichnet.
bezeichnet.
Für Funktionen ,
die Werte in einem separablen Banachraum
annehmen, stimmt das Pettis-Integral mit dem McShane- und dem Bochner-Integral
überein. Wichtigster Spezialfall all dieser Definitionen ist der Fall von
Funktionen in den ,
die bei allen diesen Definitionen einfach komponentenweise integriert werden.
Verallgemeinerungen
Der Integralbegriff wurde vielfältig ausgeweitet, einige Varianten sind:
- Riemann-Integral
- Daniell-Integral
- Stieltjes-Integral
- Itō-Integral und Stratonowitsch-Integral, siehe auch Diskretes stochastisches Integral
- Gauge-Integral
bzw. Henstock-Kurzweil-Integral, speziell:
- McShane-Integral
- Pfeffer-Integral
- Maß-Integral
- Lebesgue-Integral
- Bochner-Integral
- Birkhoff-Integral
- Pettis-Integral
- Haar-Integral
- Volkenborn-Integral
Maßtheorie
Haarsches Maß
Das Haarsche Maß, nach Alfréd Haar, stellt eine Verallgemeinerung des Lebesgue-Maßes für lokalkompakte topologische Gruppen dar und induziert damit auch ein Integral als Verallgemeinerung des Lebesgue-Integrals.
Integration auf Mannigfaltigkeiten
Siehe: Integration von Differentialformen
Schließlich kann Integration auch dazu verwendet werden, Oberflächen von gegebenen Körpern zu messen. Dies führt in das Gebiet der Differentialgeometrie.
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 17.09. 2021