Mannigfaltigkeit
.jpg)
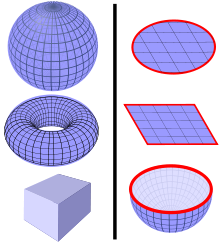
Unter einer Mannigfaltigkeit versteht man in der Mathematik einen topologischen Raum,
der lokal dem euklidischen
Raum  gleicht. Global muss die Mannigfaltigkeit jedoch nicht einem euklidischen
Raum gleichen (nicht zu ihm homöomorph
sein).
gleicht. Global muss die Mannigfaltigkeit jedoch nicht einem euklidischen
Raum gleichen (nicht zu ihm homöomorph
sein).
Mannigfaltigkeiten sind der zentrale Gegenstand der Differentialgeometrie; sie haben bedeutende Anwendungen in der theoretischen Physik.
Einführendes Beispiel
Ein gern gewähltes Beispiel für eine Mannigfaltigkeit ist eine Sphäre (= Kugeloberfläche), anschaulich etwa die Erdoberfläche:
Jede Region der Erde kann mit einer Karte
auf eine Ebene
( )
abgebildet werden. Nähert man sich dem Rand der Karte, soll zu einer anderen
Karte gewechselt werden, die das angrenzende Gebiet darstellt. So kann eine
Mannigfaltigkeit durch einen vollständigen Satz von Karten vollständig
beschrieben werden; man braucht dabei Regeln, wie sich beim Kartenwechsel die
Karten überlappen. Dagegen gibt es keine einzelne Karte, auf der die gesamte
Kugeloberfläche vollständig dargestellt werden kann, ohne letztere zu
„zerreißen“; Weltkarten
haben ebenfalls stets „Ränder“, oder sie bilden Teile der Erde zweimal ab. Die
Dimension einer Mannigfaltigkeit entspricht der Dimension einer lokalen Karte;
alle Karten haben die gleiche Dimension.
)
abgebildet werden. Nähert man sich dem Rand der Karte, soll zu einer anderen
Karte gewechselt werden, die das angrenzende Gebiet darstellt. So kann eine
Mannigfaltigkeit durch einen vollständigen Satz von Karten vollständig
beschrieben werden; man braucht dabei Regeln, wie sich beim Kartenwechsel die
Karten überlappen. Dagegen gibt es keine einzelne Karte, auf der die gesamte
Kugeloberfläche vollständig dargestellt werden kann, ohne letztere zu
„zerreißen“; Weltkarten
haben ebenfalls stets „Ränder“, oder sie bilden Teile der Erde zweimal ab. Die
Dimension einer Mannigfaltigkeit entspricht der Dimension einer lokalen Karte;
alle Karten haben die gleiche Dimension.
Ein anderes Beispiel ist der Torus („Rettungsring“, „Donut“).
Geschichtlicher Überblick
Das Konzept von Mannigfaltigkeiten entstand im 19. Jahrhundert insbesondere
durch Forschung in der Geometrie
und der Funktionentheorie.
Während Differentialgeometer lokale Konzepte wie zum Beispiel die Krümmung von Kurven und Flächen
untersuchten, betrachteten Funktionentheoretiker globale Probleme. Sie fanden
heraus, dass Eigenschaften von Funktionen  mit topologischen Invarianten der Menge
mit topologischen Invarianten der Menge  für bestimmte
für bestimmte  zusammenhängen. Diese Mengen
sind Mannigfaltigkeiten (vgl. Satz
vom regulären Wert).
zusammenhängen. Diese Mengen
sind Mannigfaltigkeiten (vgl. Satz
vom regulären Wert).
Der Begriff der Mannigfaltigkeit geht auf Bernhard
Riemann zurück. In seinem Habilitationsvortrag Ueber die Hypothesen
welche der Geometrie zu Grunde liegen, den er 1854 unter anderem vor Carl
Friedrich Gauß hielt, führte er den Begriff der Mannigfaltigkeiten
ein. Er spricht von discreten und stetigen Mannigfaltigkeiten, die
n-fach ausgedehnt sind, beschränkt sich zu dieser Zeit also auf Gebilde,
die in den
eingebettet sind.
Auf diesen Mannigfaltigkeiten kann man Winkel und Abstände messen. In späteren
Arbeiten entwickelte er die riemannschen
Flächen, die wahrscheinlich die ersten abstrakten Mannigfaltigkeiten waren.
Mannigfaltigkeiten werden zur Abgrenzung manchmal abstrakt genannt, um
auszudrücken, dass sie keine Teilmengen des euklidischen Raums sind.
Henri Poincaré begann in seinen Arbeiten mit der Untersuchung von dreidimensionalen Mannigfaltigkeiten, während bis dahin überwiegend zweidimensionale Mannigfaltigkeiten (Flächen) behandelt worden waren. Im Jahr 1904 stellte er die nach ihm benannte Poincaré-Vermutung auf. Sie besagt, dass jede einfach-zusammenhängende, kompakte dreidimensionale Mannigfaltigkeit homöomorph zur 3-Sphäre ist. Für diese Vermutung veröffentlichte Grigori Jakowlewitsch Perelman im Jahr 2002 einen Beweis, der zwar nicht in einer referierten Fachzeitschrift, sondern nur im Internet veröffentlicht wurde, jedoch von der Fachöffentlichkeit als richtig angesehen wird.
Die heute übliche Definition erschien erstmals 1913 bei Hermann Weyl in Riemannsche Flächen. Jedoch wurden erst durch die Veröffentlichungen von Hassler Whitney aus dem Jahr 1936 Mannigfaltigkeiten zu einem etablierten mathematischen Objekt. Sein wohl bekanntestes Resultat ist der Einbettungssatz von Whitney.
Arten von Mannigfaltigkeiten
Topologische Mannigfaltigkeiten
Sei  ein topologischer
Raum. Man nennt
eine (topologische) Mannigfaltigkeit der Dimension
ein topologischer
Raum. Man nennt
eine (topologische) Mannigfaltigkeit der Dimension  oder kurz eine -Mannigfaltigkeit,
falls die folgenden Eigenschaften erfüllt werden:
oder kurz eine -Mannigfaltigkeit,
falls die folgenden Eigenschaften erfüllt werden:
-
ist ein Hausdorff-Raum.
-
erfüllt das zweite
Abzählbarkeitsaxiom.
-
ist lokal euklidisch, das heißt, jeder Punkt besitzt eine Umgebung,
welche homöomorph
zu einer offenen Teilmenge des
ist.
Mannigfaltigkeiten erben viele lokale Eigenschaften vom Euklidischen Raum: sie sind lokal wegzusammenhängend, lokalkompakt und lokal metrisierbar. Mannigfaltigkeiten, welche homöomorph zueinander sind, werden als gleich (beziehungsweise äquivalent) angesehen. Daraus entstand die Frage nach der Klassifikation, also die Frage, wie viele nicht äquivalente Mannigfaltigkeiten es gibt.
Differenzierbare Mannigfaltigkeiten
Homöomorphismus, Karte und Atlas
Um differenzierbare Funktionen zu betrachten, reicht die Struktur einer
topologischen Mannigfaltigkeit nicht aus. Es sei
eine solche topologische -Mannigfaltigkeit
ohne Rand. Ist eine offene
Teilmenge von
vorgegeben, auf der ein Homöomorphismus zu einer offenen Menge von
definiert ist, dann nennt man diesen Homöomorphismus eine Karte. Eine Menge
von Karten, deren Urbilder
überdecken, heißt Atlas
von .
Verschiedene Karten  induzieren einen Homöomorphismus
induzieren einen Homöomorphismus  (einen so genannten Kartenwechsel oder Koordinatenwechsel) zwischen offenen
Teilmengen von .
Falls für einen Atlas
(einen so genannten Kartenwechsel oder Koordinatenwechsel) zwischen offenen
Teilmengen von .
Falls für einen Atlas  alle solchen Kartenwechsel
alle solchen Kartenwechsel  -mal
differenzierbar sind, dann nennt man
einen
-mal
differenzierbar sind, dann nennt man
einen  -Atlas.
Zwei -Atlanten
(derselben Mannigfaltigkeit) nennt man genau dann miteinander
verträglich, wenn ihre Vereinigung wieder einen -Atlas
bildet. Diese Verträglichkeit ist eine Äquivalenzrelation.
Eine -Mannigfaltigkeit
ist eine topologische Mannigfaltigkeit zusammen mit einem -Atlas
(eigentlich mit einer Äquivalenzklasse von -Atlanten).
Glatte Mannigfaltigkeiten sind Mannigfaltigkeiten vom Typ
-Atlas.
Zwei -Atlanten
(derselben Mannigfaltigkeit) nennt man genau dann miteinander
verträglich, wenn ihre Vereinigung wieder einen -Atlas
bildet. Diese Verträglichkeit ist eine Äquivalenzrelation.
Eine -Mannigfaltigkeit
ist eine topologische Mannigfaltigkeit zusammen mit einem -Atlas
(eigentlich mit einer Äquivalenzklasse von -Atlanten).
Glatte Mannigfaltigkeiten sind Mannigfaltigkeiten vom Typ  .
Sind alle Kartenwechsel sogar analytisch,
dann nennt man die Mannigfaltigkeit ebenfalls analytisch oder auch
.
Sind alle Kartenwechsel sogar analytisch,
dann nennt man die Mannigfaltigkeit ebenfalls analytisch oder auch  -Mannigfaltigkeit.
-Mannigfaltigkeit.
Auf einer -Mannigfaltigkeit
nennt man eine Funktion  genau dann
genau dann  -mal
differenzierbar (
-mal
differenzierbar ( ),
wenn sie auf jeder Karte -mal
differenzierbar ist.
),
wenn sie auf jeder Karte -mal
differenzierbar ist.
Zu jeder (parakompakten)  -Mannigfaltigkeit
(
-Mannigfaltigkeit
( )
existiert ein Atlas, der beliebig oft differenzierbar oder sogar analytisch ist.
In der Tat ist diese Struktur sogar eindeutig, das heißt, es ist keine
Einschränkung der Allgemeinheit, anzunehmen, dass jede Mannigfaltigkeit
analytisch ist (wenn man von differenzierbaren Mannigfaltigkeiten redet).
)
existiert ein Atlas, der beliebig oft differenzierbar oder sogar analytisch ist.
In der Tat ist diese Struktur sogar eindeutig, das heißt, es ist keine
Einschränkung der Allgemeinheit, anzunehmen, dass jede Mannigfaltigkeit
analytisch ist (wenn man von differenzierbaren Mannigfaltigkeiten redet).
Diese Aussage ist aber für topologische Mannigfaltigkeiten der Dimension
 oder höher nicht mehr unbedingt richtig: So gibt es sowohl
oder höher nicht mehr unbedingt richtig: So gibt es sowohl  -Mannigfaltigkeiten,
die keine differenzierbare Struktur besitzen, als auch
-Mannigfaltigkeiten,
die keine differenzierbare Struktur besitzen, als auch  -Mannigfaltigkeiten
(oder auch -Mannigfaltigkeiten,
s.o.), die als differenzierbare Mannigfaltigkeiten unterschiedlich, aber
als topologische Mannigfaltigkeiten gleich sind. Das bekannteste Beispiel für
den zweiten Fall sind die so genannten exotischen
-Mannigfaltigkeiten
(oder auch -Mannigfaltigkeiten,
s.o.), die als differenzierbare Mannigfaltigkeiten unterschiedlich, aber
als topologische Mannigfaltigkeiten gleich sind. Das bekannteste Beispiel für
den zweiten Fall sind die so genannten exotischen  -Sphären,
die alle homöomorph zu
-Sphären,
die alle homöomorph zu  (aber untereinander nicht diffeomorph) sind. Da die topologische und die
differenzierbare Kategorie in niedriger Dimension übereinstimmen, sind solche
Resultate nur schwer zu veranschaulichen.
(aber untereinander nicht diffeomorph) sind. Da die topologische und die
differenzierbare Kategorie in niedriger Dimension übereinstimmen, sind solche
Resultate nur schwer zu veranschaulichen.
Tangentialbündel
An jedem Punkt  einer -dimensionalen,
differenzierbaren (aber nicht einer topologischen) Mannigfaltigkeit findet man
einen Tangentialraum.
In einer Karte heftet man an diesen Punkt einfach einen
an und überlegt sich dann, dass das Differential eines Koordinatenwechsels an
jedem Punkt einen linearen Isomorphismus definiert, der die Transformation des
Tangentialraums in die andere Karte leistet. Abstrakt definiert man den
Tangentialraum an
entweder als den Raum der Derivationen an diesem Punkt oder den Raum von
Äquivalenzklassen von differenzierbaren Kurven (wobei die Äquivalenzrelation
angibt, wann die Geschwindigkeitsvektoren zweier Kurven an
gleich sein sollen).
einer -dimensionalen,
differenzierbaren (aber nicht einer topologischen) Mannigfaltigkeit findet man
einen Tangentialraum.
In einer Karte heftet man an diesen Punkt einfach einen
an und überlegt sich dann, dass das Differential eines Koordinatenwechsels an
jedem Punkt einen linearen Isomorphismus definiert, der die Transformation des
Tangentialraums in die andere Karte leistet. Abstrakt definiert man den
Tangentialraum an
entweder als den Raum der Derivationen an diesem Punkt oder den Raum von
Äquivalenzklassen von differenzierbaren Kurven (wobei die Äquivalenzrelation
angibt, wann die Geschwindigkeitsvektoren zweier Kurven an
gleich sein sollen).
Die Vereinigung aller Tangentialräume einer Mannigfaltigkeit bildet ein Vektorbündel, das
Tangentialbündel genannt wird. Der Tangentialraum einer Mannigfaltigkeit
im Punkt
wird meist mit  bezeichnet, das Tangentialbündel mit
bezeichnet, das Tangentialbündel mit  .
.
Komplexe Mannigfaltigkeiten
Eine topologische Mannigfaltigkeit  heißt komplexe Mannigfaltigkeit der (komplexen) Dimension ,
falls jeder Punkt
heißt komplexe Mannigfaltigkeit der (komplexen) Dimension ,
falls jeder Punkt  eine offene Umgebung
eine offene Umgebung  hat, die homöomorph zu einer offenen Menge
hat, die homöomorph zu einer offenen Menge  ist. Ferner fordert man, dass für je zwei Karten
ist. Ferner fordert man, dass für je zwei Karten  der Kartenwechsel
der Kartenwechsel

holomorph
ist. Hierbei bezeichne  die Menge
die Menge  .
.
Der wesentliche Unterschied zu gewöhnlichen differenzierbaren
Mannigfaltigkeiten liegt weniger im Unterschied zwischen  und
und  ,
sondern in der viel stärkeren Forderung der komplexen
Differenzierbarkeit der Kartenwechselabbildungen.
,
sondern in der viel stärkeren Forderung der komplexen
Differenzierbarkeit der Kartenwechselabbildungen.
(Zusammenhängende) Komplexe Mannigfaltigkeiten der Dimension 1 werden als Riemannsche Flächen bezeichnet. Andere spezielle komplexe Mannigfaltigkeiten sind die Steinschen Mannigfaltigkeiten und die Kählermannigfaltigkeiten, die komplexe, riemannsche Mannigfaltigkeiten sind.
Riemannsche Mannigfaltigkeiten
Um auf einer differenzierbaren Mannigfaltigkeit von Längen, Abständen, Winkeln und Volumen zu sprechen, benötigt man eine zusätzliche Struktur. Eine Riemannsche Metrik (auch Metrischer Tensor genannt) definiert im Tangentialraum jedes Punktes der Mannigfaltigkeit ein Skalarprodukt. Eine differenzierbare Mannigfaltigkeit mit einer riemannschen Metrik heißt Riemannsche Mannigfaltigkeit. Durch die Skalarprodukte sind zunächst Längen von Vektoren und Winkel zwischen Vektoren definiert, davon ausgehend dann auch Längen von Kurven und Abstände zwischen Punkten auf der Mannigfaltigkeit.
Ist statt eines Skalarprodukts in jedem Tangentialraum nur eine (nicht notwendig symmetrische) Norm definiert, so spricht man von einer Finsler-Metrik und einer Finsler-Mannigfaltigkeit. Auf Finsler-Mannigfaltigkeiten sind Längen und Abstände definiert, nicht aber Winkel.
Semi-Riemannsche Mannigfaltigkeiten
Andere Verallgemeinerungen riemannscher Mannigfaltigkeiten sind Semi-Riemannsche Mannigfaltigkeiten (auch Pseudo-Riemannsche Mannigfaltigkeiten genannt), die zum Beispiel in der Allgemeinen Relativitätstheorie auftreten.
Hier braucht die durch die Metrik in jedem Tangentialraum definierte
symmetrische Bilinearform
nicht positiv definit zu sein, sondern nur nicht-ausgeartet.
Nach dem Trägheitssatz
von Sylvester lässt sich eine solche Bilinearform als Diagonalmatrix mit
Einträgen von  darstellen. Sind dann
darstellen. Sind dann  Einträge +1 und
Einträge -1, spricht man von einer Metrik mit Signatur
Einträge +1 und
Einträge -1, spricht man von einer Metrik mit Signatur
 .
Ist die Signatur der Metrik
.
Ist die Signatur der Metrik  (oder nach einer anderen Konvention
(oder nach einer anderen Konvention  ),
wobei
),
wobei  die Dimension der Mannigfaltigkeit ist, so spricht man von einer Lorentz-Mannigfaltigkeit.
In der Allgemeinen Relativitätstheorie wird die Raumzeit
durch eine vierdimensionale Lorentz-Mannigfaltigkeit, also mit der Signatur
(3,1) (bzw. (1,3)), beschrieben.
die Dimension der Mannigfaltigkeit ist, so spricht man von einer Lorentz-Mannigfaltigkeit.
In der Allgemeinen Relativitätstheorie wird die Raumzeit
durch eine vierdimensionale Lorentz-Mannigfaltigkeit, also mit der Signatur
(3,1) (bzw. (1,3)), beschrieben.
Banach-Mannigfaltigkeit
Eine Banach-Mannigfaltigkeit ist ein Hausdorffraum, der das zweite Abzählbarkeitsaxiom erfüllt und der lokal homöomorph zu einem beliebigen Banachraum ist und die übliche Kartenwechsel-Bedingung einer differenzierbaren Mannigfaltigkeit erfüllt. Die Kartenwechsel können frechet-differenzierbar und die Dimension dieser Mannigfaltigkeiten kann unendlichdimensional sein. Somit kann dieser Typ Mannigfaltigkeit als Verallgemeinerung einer differenzierbaren Mannigfaltigkeit verstanden werden.
Lie-Gruppen
Eine Lie-Gruppe ist sowohl eine differenzierbare Mannigfaltigkeit als auch
eine Gruppe,
wobei die Gruppenmultiplikation (beziehungsweise Addition) und das Invertieren
eines Gruppenelements differenzierbare Abbildungen sein müssen. Der Tangentialraum einer
Lie-Gruppe am neutralen Element ist bezüglich des Kommutators
![[\cdot ,\cdot ]](/svg/28dd4c22d60192519c1c12cf645b040f368db9e9.svg) abgeschlossen
und bildet eine zur Lie-Gruppe assoziierte Lie-Algebra.
abgeschlossen
und bildet eine zur Lie-Gruppe assoziierte Lie-Algebra.
Ein einfaches Beispiel für eine nicht kompakte
Lie-Gruppe ist der euklidische Vektorraum
zusammen mit der normalen Vektorraumaddition. Die unitäre Gruppe
 ist ein Beispiel einer kompakten Lie-Gruppe (man kann sich diese
Mannigfaltigkeit als einen Kreis vorstellen und die Gruppenoperation ist
eine Drehung dieses Kreises). In der Physik (siehe Quantenchromodynamik)
kommen vor allem die Gruppen
ist ein Beispiel einer kompakten Lie-Gruppe (man kann sich diese
Mannigfaltigkeit als einen Kreis vorstellen und die Gruppenoperation ist
eine Drehung dieses Kreises). In der Physik (siehe Quantenchromodynamik)
kommen vor allem die Gruppen  vor, die „speziellen unitären Gruppen der Ordnung “
vor (z.B.
vor, die „speziellen unitären Gruppen der Ordnung “
vor (z.B.  ).
).
Topologische Eigenschaften
- Für Mannigfaltigkeiten fallen die Begriffe zusammenhängend und wegzusammenhängend zusammen. Da Mannigfaltigkeiten auch lokal einfach zusammenhängend sind, haben alle zusammenhängenden Mannigfaltigkeiten eine universelle Überlagerung.
- Jede Mannigfaltigkeit hat eine abzählbare Fundamentalgruppe.
- Jede Mannigfaltigkeit der Dimension
 ist triangulierbar.
Vierdimensionale Mannigfaltigkeiten sind im Allgemeinen nicht triangulierbar
und auch für Mannigfaltigkeiten höherer Dimension wurde von Ciprian Manolescu
bewiesen, dass sie nicht immer triangulierbar sind.
ist triangulierbar.
Vierdimensionale Mannigfaltigkeiten sind im Allgemeinen nicht triangulierbar
und auch für Mannigfaltigkeiten höherer Dimension wurde von Ciprian Manolescu
bewiesen, dass sie nicht immer triangulierbar sind. - Jede Mannigfaltigkeit ist metrisierbar. Dies folgt mittels des Metrisierbarkeitssatzes von Urysohn aus der Zweitabzählbarkeit zusammen mit der lokalen Kompaktheit oder Metrisierbarkeit.
Mannigfaltigkeit mit Rand
Mannigfaltigkeiten, welche bis jetzt in diesem Artikel abgehandelt wurden,
sind unberandet. Berandete Mannigfaltigkeiten sind auch keine Mannigfaltigkeiten
im obigen Sinn, jedoch ist ihre Definition sehr ähnlich. Sei dazu also
wieder ein topologischer
Hausdorff-Raum, welcher
dem zweiten
Abzählbarkeitsaxiom genügt. Der Raum
heißt Mannigfaltigkeit mit Rand, falls jeder Punkt eine Umgebung besitzt,
welche homöomorph
zu einer Teilmenge des „nichtnegativen ‑dimensionalen
Halbraumes“  ist:
ist:
 .
.
Diese (nichtkompakte) Mannigfaltigkeit ist durch die  -dimensionale
Ebene
-dimensionale
Ebene  berandet.
berandet.
Ein Beispiel für eine kompakte berandete Mannigfaltigkeit ist die abgeschlossene Vollkugel, die die Sphäre als Rand hat. Diese ist selbst eine unberandete Mannigfaltigkeit. Auf berandeten Mannigfaltigkeiten kann man zusätzliche Strukturen ähnlich wie auf unberandeten Mannigfaltigkeiten definieren. Es ist zum Beispiel möglich, auf gewissen Mannigfaltigkeiten mit Rand eine differenzierbare Struktur zu definieren oder von Orientierbarkeit zu sprechen.
Mannigfaltigkeiten mit Orientierung
Eine weitere wesentliche Eigenschaft von berandeten oder unberandeten Mannigfaltigkeiten betrifft die Orientierbarkeit bzw. Nicht-Orientierbarkeit der Mannigfaltigkeit. Sie kann ebenfalls „kartenweise“ definiert werden (wobei die Verträglichkeit von selbst erfüllt ist).
Wie die folgenden Beispiele zeigen, kommen alle vier Kombinationen mit bzw. ohne Rand sowie mit bzw. ohne Orientierung vor.
Beispiele
Diskreter Raum
Jeder abzählbare
diskrete
topologische Raum  ist eine nulldimensionale topologische Mannigfaltigkeit. Die Karten dieser
Mannigfaltigkeiten sind die Paare
ist eine nulldimensionale topologische Mannigfaltigkeit. Die Karten dieser
Mannigfaltigkeiten sind die Paare  mit
mit  und
und  .
.
Sphäre
Die Sphäre  ist eine unberandete orientierte Mannigfaltigkeit der Dimension .
Ein Atlas dieser Mannigfaltigkeit ist gegeben durch die beiden stereographischen
Projektionen
ist eine unberandete orientierte Mannigfaltigkeit der Dimension .
Ein Atlas dieser Mannigfaltigkeit ist gegeben durch die beiden stereographischen
Projektionen

wobei  den Nordpol
den Nordpol  und
den Südpol
und
den Südpol  der Sphäre bezeichnen. Die daraus resultierende Initialtopologie ist
die gleiche, die durch
der Sphäre bezeichnen. Die daraus resultierende Initialtopologie ist
die gleiche, die durch  auf
als Teilraumtopologie
induziert würde. Die Sphäre wird außer in der Mathematik auch in anderen
Wissenschaften untersucht, so zum Beispiel in der Kartographie oder auch in der
Theoretischen Physik bei der sogenannten Bloch-Kugel.
auf
als Teilraumtopologie
induziert würde. Die Sphäre wird außer in der Mathematik auch in anderen
Wissenschaften untersucht, so zum Beispiel in der Kartographie oder auch in der
Theoretischen Physik bei der sogenannten Bloch-Kugel.
Rechteck

 und Breite
und Breite  (sowie der Diagonale
(sowie der Diagonale  )
)Ein einfaches Beispiel einer berandeten und orientierbaren Mannigfaltigkeit betrifft ein (abgeschlossenes) Rechteck wie in nebenstehender Skizze. Der Rand besteht aus den Rechteckseiten; die zwei Orientierungen sind „entgegen dem Uhrzeigersinn“ (+) bzw. „im Uhrzeigersinn“ (−). Im ersten Fall wird etwa der folgende Umlauf betrachtet: Von A nach B und weiter nach C und D, von dort zurück nach A; alles entgegen dem Uhrzeigersinn.
Möbiussches Band

Wenn man die Seiten  und
und  des oben behandelten Rechtecks derart zusammenklebt, dass A auf B und C auf D zu
liegen kommen, dann erhält man eine orientierbare, berandete Mannigfaltigkeit,
die homöomorph zu
des oben behandelten Rechtecks derart zusammenklebt, dass A auf B und C auf D zu
liegen kommen, dann erhält man eine orientierbare, berandete Mannigfaltigkeit,
die homöomorph zu ![[0,1]\times S^{1}](/svg/eb1f5e7cc604fe8a76edb37f84a3d73369d97753.svg) ,
das heißt zum kartesischen
Produkt aus dem geschlossenen
Einheitsintervall
und dem Kreisrand ist. Diese kann in den dreidimensionalen euklidischen Raum als
Mantelfläche eines Zylinders
eingebettet werden.
,
das heißt zum kartesischen
Produkt aus dem geschlossenen
Einheitsintervall
und dem Kreisrand ist. Diese kann in den dreidimensionalen euklidischen Raum als
Mantelfläche eines Zylinders
eingebettet werden.
Wenn man dagegen die Punkte A und C sowie D und B zusammenklebt, was nach „Verdrillung“ der Schmalseiten möglich ist, und wenn das „Zusammenkleben“ nahtlos erfolgt, entsteht eine nicht orientierbare zweidimensionale Mannigfaltigkeit mit Rand. Diese wird Möbiusband genannt.
Der Rand dieser Mannigfaltigkeit entspricht einer „8“, das heißt mit der charakteristischen Überkreuzung in der Mitte. Zunächst wird z.B. entgegen dem Uhrzeigersinn der untere Halbkreis der 8 durchlaufen (= von A nach B), dann folgt die Überkreuzung (diese entspricht dem Überkleben mit Verdrillung); nach dem Überkreuzen folgt der obere Kreis der 8, durchlaufen im anderen Drehsinn, das heißt nicht von C nach D, sondern von D nach C.
Kleinsche Flasche

Auf analoge Weise erhält man durch geeignetes Zusammenkleben zweier Bänder in Räumen mit wenigstens drei Dimensionen eine nicht orientierbare zweidimensionale Mannigfaltigkeit ganz ohne Rand, analog zur Oberfläche einer „Kugel mit Henkel“, das heißt eines Gebildes, das einem Torus ähnelt, der aber natürlich orientierbar wäre:
Diese nicht-orientierbare Mannigfaltigkeit ohne Rand heißt Kleinsche Flasche.
Klassifizierung und Invarianten von Mannigfaltigkeiten
Am Anfang des Artikels wurde dargestellt, dass Mannigfaltigkeiten unterschiedliche Strukturen allgemeiner Art tragen können. Bei der Klassifikation von Mannigfaltigkeiten müssen diese Strukturen natürlich beachtet werden. So können zwei Mannigfaltigkeiten aus topologischer Sicht äquivalent sein, was bedeutet, dass es einen Homöomorphismus gibt, der die eine Mannigfaltigkeit in die andere überführt, jedoch können diese zwei Mannigfaltigkeiten unterschiedliche, nicht verträgliche differenzierbare Strukturen tragen, dann sind sie aus Sicht der Differentialgeometrie nicht äquivalent; aus der Sicht der Topologie können sie dagegen äquivalent sein. Sind zwei Mannigfaltigkeiten aus einer vorgegebenen Sicht äquivalent, so haben diese auch die gleichen, zu dieser Sicht passenden Invarianten, zum Beispiel gleiche Dimension oder gleiche Fundamentalgruppe.
Die zusammenhängenden eindimensionalen Mannigfaltigkeiten sind entweder
diffeomorph und damit auch homöomorph zur reellen Zahlengerade  oder zum Kreis
oder zum Kreis
 .
.
Die Klassifikation geschlossener Mannigfaltigkeiten ist in den Dimensionen zwei und drei ebenfalls bekannt. Mannigfaltigkeiten dieser Dimension haben genauso wie die eindimensionalen Mannigfaltigkeiten die besondere Eigenschaft, dass jede topologische Mannigfaltigkeit genau eine differenzierbare Struktur zulässt. Dies hat zur Folge, dass sich bei der Untersuchung solcher Mannigfaltigkeiten topologische und differentialgeometrische Methoden kombinieren lassen. In der Theorie der zweidimensionalen, geschlossenen Mannigfaltigkeiten gibt es den Klassifikationssatz für 2-Mannigfaltigkeiten. So sind zwei geschlossene Flächen mit gleichem Geschlecht zueinander diffeomorph, wenn sie beide orientierbar beziehungsweise beide nicht-orientierbar sind. Geschlossene Flächen sind also durch die Invarianten Orientierbarkeit und Geschlecht vollständig bestimmt. Für dreidimensionale, geschlossene Mannigfaltigkeiten wurde mittlerweile die wichtige „Vermutung zur Geometrisierung von 3-Mannigfaltigkeiten“ von Grigori Perelman bewiesen. Diese Theorie enthält als Spezialfall die Vermutung von Poincaré.
Bei vierdimensionalen Mannigfaltigkeiten ist die Klassifikation selbst im
Fall einfach zusammenhängender Mannigfaltigkeiten sehr kompliziert und im
Allgemeinen unmöglich, weil jede endlich präsentierte Gruppe als
Fundamentalgruppe einer 4-Mannigfaltigkeit vorkommt und die Klassifikation
endlich präsentierter Gruppen algorithmisch unmöglich ist. Man nennt den euklidischen Raum
,
die Sphäre
und den hyperbolischen
Raum  Modellräume (im Englischen: model spaces), da ihre Geometrie
verhältnismäßig einfach zu beschreiben ist. In Dimension Vier sind diese Räume
auch sehr komplex. Es ist nicht bekannt, ob die Sphäre
Modellräume (im Englischen: model spaces), da ihre Geometrie
verhältnismäßig einfach zu beschreiben ist. In Dimension Vier sind diese Räume
auch sehr komplex. Es ist nicht bekannt, ob die Sphäre  zwei nicht verträgliche differenzierbare Strukturen besitzt, vermutet wird, dass
sie unendlich viele besitzt. Der (nicht geschlossene) euklidische Raum
zwei nicht verträgliche differenzierbare Strukturen besitzt, vermutet wird, dass
sie unendlich viele besitzt. Der (nicht geschlossene) euklidische Raum  besitzt sogar überabzählbar
viele. Aus diesem Grund ist die vierte Dimension eine Besonderheit, denn in
allen anderen Dimension lässt sich nur genau eine differenzierbare Struktur auf
definieren. Ab Dimension fünf erweist sich die Klassifikation, jedenfalls für
einfach zusammenhängende Mannigfaltigkeiten, als etwas einfacher. Jedoch gibt es
auch hier noch viele offene Fragen, und die Klassifikation ist immer noch sehr
komplex. Aus diesem Grund beschränkt man sich oftmals darauf zu untersuchen, ob
Mannigfaltigkeiten unterschiedlichen Klassen angehören, also ob sie
unterschiedliche Invarianten besitzen. So nutzt man unter anderem Techniken aus
der algebraischen
Topologie, wie zum Beispiel die Homotopietheorie oder
Homologietheorien,
um Mannigfaltigkeiten auf Invarianten zu untersuchen, beispielsweise einer
Invariante für den „einfachen
Zusammenhang“.
besitzt sogar überabzählbar
viele. Aus diesem Grund ist die vierte Dimension eine Besonderheit, denn in
allen anderen Dimension lässt sich nur genau eine differenzierbare Struktur auf
definieren. Ab Dimension fünf erweist sich die Klassifikation, jedenfalls für
einfach zusammenhängende Mannigfaltigkeiten, als etwas einfacher. Jedoch gibt es
auch hier noch viele offene Fragen, und die Klassifikation ist immer noch sehr
komplex. Aus diesem Grund beschränkt man sich oftmals darauf zu untersuchen, ob
Mannigfaltigkeiten unterschiedlichen Klassen angehören, also ob sie
unterschiedliche Invarianten besitzen. So nutzt man unter anderem Techniken aus
der algebraischen
Topologie, wie zum Beispiel die Homotopietheorie oder
Homologietheorien,
um Mannigfaltigkeiten auf Invarianten zu untersuchen, beispielsweise einer
Invariante für den „einfachen
Zusammenhang“.

Zusammenhängende differenzierbare Mannigfaltigkeiten besitzen keine lokalen
Invarianten. Das heißt, diese Eigenschaften gelten global für die ganze
Mannigfaltigkeit und sind nicht von einem Punkt abhängig. Bei riemannschen
Mannigfaltigkeiten ist dies anders. Mit Hilfe ihres Skalarproduktes können
Krümmungen definiert werden. Der wichtigste Krümmungsbegriff ist der riemannsche
Krümmungstensor, aus dem die meisten anderen Krümmungsbegriffe abgeleitet
werden. Der Wert des Krümmungstensors ist abhängig von Punkt der
Mannigfaltigkeit. So sind die Invarianten von Mannigfaltigkeiten mit
Skalarprodukt vielfältiger als die von differenzierbaren Mannigfaltigkeiten ohne
Skalarprodukt. Die Schnittkrümmung
ist eine wichtige aus dem Krümmungstensor abgeleitete Größe. Für riemannsche
Mannigfaltigkeiten mit konstanter Schnittkrümmung ist eine Klassifikation
bekannt. Es lässt sich zeigen, dass solche Mannigfaltigkeiten isometrisch (also äquivalent)
zu  sind. Wobei
für einen der oben erwähnten Modelräume
sind. Wobei
für einen der oben erwähnten Modelräume  oder
oder  steht und
steht und  eine diskrete
Untergruppe der Isometriegruppe
eine diskrete
Untergruppe der Isometriegruppe  ist, die frei
und eigentlich
diskontinuierlich auf
operiert. In der globalen
riemannschen Geometrie untersucht man Mannigfaltigkeiten mit global
beschränkter Krümmung auf topologische Eigenschaften. Ein besonders
bemerkenswertes Resultat aus diesem Bereich ist der Sphärensatz.
Hier wird aus bestimmten topologischen Eigenschaften und einer durch
ist, die frei
und eigentlich
diskontinuierlich auf
operiert. In der globalen
riemannschen Geometrie untersucht man Mannigfaltigkeiten mit global
beschränkter Krümmung auf topologische Eigenschaften. Ein besonders
bemerkenswertes Resultat aus diesem Bereich ist der Sphärensatz.
Hier wird aus bestimmten topologischen Eigenschaften und einer durch  beschränkten Schnittkrümmung
beschränkten Schnittkrümmung  gefolgert, dass die Mannigfaltigkeit homöomorph (topologisch äquivalent) zur
Sphäre ist. Im Jahr 2007 konnte sogar bewiesen werden, dass unter diesen
Voraussetzungen die Mannigfaltigkeiten diffeomorph sind.
gefolgert, dass die Mannigfaltigkeit homöomorph (topologisch äquivalent) zur
Sphäre ist. Im Jahr 2007 konnte sogar bewiesen werden, dass unter diesen
Voraussetzungen die Mannigfaltigkeiten diffeomorph sind.
Anwendungen
Mannigfaltigkeiten spielen eine wichtige Rolle in der Theoretischen Physik, der Theoretischen Biologie, den Ingenieurwissenschaften sowie in den Geowissenschaften, z.B. bei der Integration über Flächen und mehrdimensionale Integrationsgebiete, besonders Mannigfaltigkeiten mit Rand und mit Orientierung (siehe z.B. den Artikel Satz von Stokes).
In der Allgemeinen Relativitätstheorie und der Astrophysik sowie in den relativistischen Quantenfeldtheorien spielen Lorentzmannigfaltigkeiten, das heißt solche der Signatur (3,1), eine besondere Rolle bei der mathematischen Modellierung der Raumzeit und der vielen damit zusammenhängenden Größen.
In der Evolutionsbiologie betrachtet man unter anderem die Wright-Mannigfaltigkeit, als Menge der in einem genetischen Kopplungsgleichgewicht befindlichen Allelfrequenzen einer Population.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 11.08. 2025