Kurve (Mathematik)
In der Mathematik ist eine Kurve (von lateinisch curvus „gebogen, gekrümmt“) ein eindimensionales Objekt. Im Gegensatz etwa zu einer Geraden muss eine Kurve grundsätzlich keinen geraden, sondern kann vielmehr jeden beliebigen Verlauf annehmen.
Eindimensional bedeutet dabei informell, dass man sich auf der Kurve nur in eine Richtung (bzw. in die Gegenrichtung) bewegen kann. Ob die Kurve in der zweidimensionalen Ebene liegt („ebene Kurve“) oder in einem höherdimensionalen Raum (siehe Raumkurve), ist in diesem begrifflichen Zusammenhang unerheblich.
Je nach Teilgebiet der Mathematik gibt es unterschiedliche Präzisierungen dieser Beschreibung.
Parameterdarstellungen
Eine Kurve kann als das Bild
eines Weges
definiert werden. Ein Weg ist (abweichend von der Umgangssprache) eine stetige
Abbildung von einem Intervall
in den betrachteten Raum, also z.B. in die euklidische Ebene  .
.
Beispiele:
- Die Abbildung
-
- beschreibt den Einheitskreis in der Ebene.

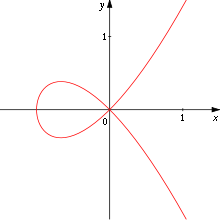
- Die Abbildung
-
- beschreibt eine Kurve mit einem einfachen Doppelpunkt bei
 ,
entsprechend den Parameterwerten
,
entsprechend den Parameterwerten  und
und  .
.

Gelegentlich, insbesondere bei historischen Bezeichnungen, wird zwischen Weg und Kurve nicht unterschieden. So ist die interessante Struktur bei der Hilbert-Kurve der Weg; das Bild dieses Weges ist das Einheitsquadrat, besitzt also keinerlei fraktale Struktur mehr.
Durch die Parameterdarstellung erhält die Kurve einen Richtungssinn in der Richtung des wachsenden Parameters.>
Gleichungsdarstellungen
Eine Kurve kann auch durch eine oder mehrere Gleichungen in den Koordinaten beschrieben werden. Beispiele dafür sind wieder die Bilder der beiden durch die obigen Parameterdarstellungen gegebenen Kurven:
- Die Gleichung
-
- beschreibt den Einheitskreis in der Ebene.

- Die Gleichung
-
- beschreibt die oben in Parameterdarstellung angegebene Kurve mit Doppelpunkt.

Ist die Gleichung wie hier durch ein Polynom gegeben, nennt man die Kurve algebraisch.
Funktionsgraphen
Funktionsgraphen sind ein Spezialfall beider oben angegebenen Formen: Der Graph einer Funktion

kann entweder als Parameterdarstellung

oder als Gleichung

angegeben werden.
Wird in der Schulmathematik von Kurvendiskussion gesprochen, so meint man üblicherweise nur diesen Spezialfall.
Differenzierbare Kurven, Krümmung
Sei ![[a,b]\subset\R](/svg/a659536067aaaac2db1c44613a09a715f0cf7246.svg) ein Intervall und
ein Intervall und ![c\colon [a,b]\to\R^n](/svg/e7ad8d914aab6289b847bb2b5a22701e63df2c8f.svg) eine reguläre Kurve, d.h.
eine reguläre Kurve, d.h.  für alle
für alle  .
Die Länge
der Kurve ist
.
Die Länge
der Kurve ist

Die Funktion

ist ein Diffeomorphismus
![[a,b]\to[0,l]](/svg/a7efc6395babb85d87d6c7ff75294339ba5a49ba.svg) ,
und die Verkettung von
,
und die Verkettung von  mit dem inversen Diffeomorphismus liefert eine neue Kurve
mit dem inversen Diffeomorphismus liefert eine neue Kurve ![\tilde c\colon [0,l]\to\R^n](/svg/121f3f4c281361eb832fc4d55fa064d1d5f381d7.svg) mit
mit  für alle
für alle  .
Man sagt:
.
Man sagt:  ist nach der Bogenlänge parametrisiert.
ist nach der Bogenlänge parametrisiert.
Sei
ein Intervall und
eine nach der Bogenlänge parametrisierte Kurve. Die Krümmung
von
an der Stelle  ist definiert als
ist definiert als  .
Für ebene Kurven kann man die Krümmung noch mit einem Vorzeichen versehen:
Ist
.
Für ebene Kurven kann man die Krümmung noch mit einem Vorzeichen versehen:
Ist  die Drehung um 90°, dann ist
die Drehung um 90°, dann ist  festgelegt durch
festgelegt durch  .
Positive Krümmung entspricht Linkskurven, negative Rechtskurven.
.
Positive Krümmung entspricht Linkskurven, negative Rechtskurven.
Geschlossene Kurven
Sei ![c\colon [0,1]\to\R^2](/svg/94d750a0e310af9e6e76214fb23f7add28feb284.svg) eine ebene Kurve. Sie heißt geschlossen, wenn
eine ebene Kurve. Sie heißt geschlossen, wenn  ,
und einfach geschlossen, wenn zusätzlich
auf
,
und einfach geschlossen, wenn zusätzlich
auf  injektiv ist. Der Jordansche
Kurvensatz besagt, dass eine einfach geschlossene Kurve die Ebene in einen
beschränkten
und einen unbeschränkten Teil zerlegt. Ist
eine geschlossene Kurve mit
injektiv ist. Der Jordansche
Kurvensatz besagt, dass eine einfach geschlossene Kurve die Ebene in einen
beschränkten
und einen unbeschränkten Teil zerlegt. Ist
eine geschlossene Kurve mit  für alle
für alle ![t\in[0,1]](/svg/31a5c18739ff04858eecc8fec2f53912c348e0e5.svg) ,
kann man der Kurve eine Umlaufzahl
zuordnen, die angibt, wie oft die Kurve um den Nullpunkt herumläuft.
,
kann man der Kurve eine Umlaufzahl
zuordnen, die angibt, wie oft die Kurve um den Nullpunkt herumläuft.
Glatten geschlossenen Kurven kann man eine weitere Zahl zuordnen, die Tangentenumlaufzahl,
die für eine nach der Bogenläge parametrisierte Kurve ![c\colon [0,l]\to\R^2](/svg/aacd328fdd90e3dab178bafd9f6bf3149af27e10.svg) durch
durch

gegeben ist. Der Umlaufsatz
von Heinz
Hopf besagt, dass eine einfache geschlossene Kurve Tangentenumlaufzahl  oder
oder  hat.
hat.
Sei allgemein  ein topologischer
Raum. Statt von geschlossenen Wegen
ein topologischer
Raum. Statt von geschlossenen Wegen ![c\colon [0,1]\to X](/svg/7d560e5e8005c0ea27e5c8f54eeb0d0bd631cd54.svg) mit
spricht man auch von Schleifen mit Basispunkt
mit
spricht man auch von Schleifen mit Basispunkt  .
Weil der Quotientenraum
.
Weil der Quotientenraum
![[0,1]/\{0,1\}](/svg/57f2a659c15ef1771a397bcb5744272e7cb2741a.svg) homöomorph
zum Einheitskreis
homöomorph
zum Einheitskreis  ist, identifiziert man Schleifen mit stetigen Abbildungen
ist, identifiziert man Schleifen mit stetigen Abbildungen  .
Zwei Schleifen
.
Zwei Schleifen  mit Basispunkt
mit Basispunkt  heißen homotop, wenn man sie unter
Beibehaltung des Basispunkts stetig ineinander deformieren kann, d.h. wenn
es eine stetige Abbildung
heißen homotop, wenn man sie unter
Beibehaltung des Basispunkts stetig ineinander deformieren kann, d.h. wenn
es eine stetige Abbildung ![H\colon [0,1]^2\to X](/svg/5295532956a16d4ca500640001167b83698ea239.svg) mit
mit  ,
,
 für alle
und
für alle
und  für alle
für alle  gilt. Die Äquivalenzklassen homotoper Schleifen bilden eine Gruppe, die Fundamentalgruppe von
.
Ist
gilt. Die Äquivalenzklassen homotoper Schleifen bilden eine Gruppe, die Fundamentalgruppe von
.
Ist  ,
dann ist die Fundamentalgruppe über die Windungszahl isomorph zu
,
dann ist die Fundamentalgruppe über die Windungszahl isomorph zu  .
.
Raumkurven
Sei
ein Intervall und ![c\colon [a,b]\to\R^3](/svg/30d9178a672742395f653fa599d46044c722bef5.svg) eine nach der Bogenlänge parametrisierte Kurve. Die folgenden Bezeichnungen sind
Standard:
eine nach der Bogenlänge parametrisierte Kurve. Die folgenden Bezeichnungen sind
Standard:

(definiert, wann immer  ).
).
 ist der Tangentialvektor,
ist der Tangentialvektor,  der Normalenvektor und
der Normalenvektor und  der Binormalenvektor, das Tripel
der Binormalenvektor, das Tripel  heißt begleitendes
Dreibein. Die Krümmung ist
heißt begleitendes
Dreibein. Die Krümmung ist  ,
die Windung
,
die Windung
 definiert durch
definiert durch  .
Es gelten die frenetschen
Formeln:
.
Es gelten die frenetschen
Formeln:

Der Hauptsatz
der lokalen Kurventheorie besagt, dass man eine Kurve aus Krümmung und
Windung rekonstruieren kann: Sind glatte Funktionen ![\kappa,\tau\colon [0,l]\to\R](/svg/b2cfa38ebbd39cc350bcdd8a17231cfccc34a3c9.svg) mit
mit  für alle
für alle ![s\in[0,l]](/svg/3fa2d4660b2142550c498892f908fed5d4f26f22.svg) (der Wert 0 ist für
(der Wert 0 ist für  also nicht erlaubt), so gibt es bis auf Bewegungen
genau eine entsprechende Kurve.
also nicht erlaubt), so gibt es bis auf Bewegungen
genau eine entsprechende Kurve.
Die von je zwei der drei Vektoren ,
 oder
oder  aufgespannten Ebenen durch den Kurvenpunkt tragen besondere Namen:
aufgespannten Ebenen durch den Kurvenpunkt tragen besondere Namen:
- Die Oskulationsebene
oder Schmiegebene wird von
und
aufgespannt.
- Die Normalebene wird von
und
aufgespannt.
- Die rektifizierende Ebene oder Streckebene wird von
und
aufgespannt.
Kurven als eigenständige Objekte
Kurven ohne umgebenden Raum sind in der Differentialgeometrie
relativ uninteressant, weil jede eindimensionale Mannigfaltigkeit diffeomorph
zur reellen Geraden  oder zur Einheitskreislinie
ist. Auch Eigenschaften wie die Krümmung
einer Kurve sind intrinsisch nicht feststellbar.
oder zur Einheitskreislinie
ist. Auch Eigenschaften wie die Krümmung
einer Kurve sind intrinsisch nicht feststellbar.
In der algebraischen Geometrie und damit zusammenhängend in der komplexen Analysis versteht man unter „Kurven“ in der Regel eindimensionale komplexe Mannigfaltigkeiten, oft auch als Riemannsche Flächen bezeichnet. Diese Kurven sind eigenständige Studienobjekte, das prominenteste Beispiel sind die elliptischen Kurven. Siehe Kurve (algebraische Geometrie)
Historisches
Das erste Buch der Elemente von Euklid begann mit der Definition „Ein Punkt ist, was keine Teile hat. Eine Kurve ist eine Länge ohne Breite.“
Diese Definition lässt sich heute nicht mehr aufrechterhalten, denn es gibt
zum Beispiel Peano-Kurven,
d.h. stetige surjektive
Abbildungen  ,
die die gesamte Ebene ausfüllen. Andererseits folgt aus dem Lemma
von Sard, dass jede differenzierbare Kurve den Flächeninhalt null, also
tatsächlich wie von Euklid gefordert „keine Breite“ hat.
,
die die gesamte Ebene ausfüllen. Andererseits folgt aus dem Lemma
von Sard, dass jede differenzierbare Kurve den Flächeninhalt null, also
tatsächlich wie von Euklid gefordert „keine Breite“ hat.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 18.06. 2021