Umlaufzahl (Mathematik)
Die Umlaufzahl (auch Windungszahl oder Index genannt) ist eine topologische Invariante, die eine entscheidende Rolle in der Funktionentheorie spielt.
Vorbetrachtung
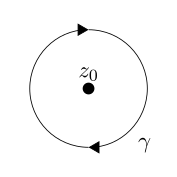
Die Umlaufzahl einer Kurve
 in Bezug auf einen Punkt
in Bezug auf einen Punkt  stellt die Anzahl der Umrundungen entgegen der Uhrzeigerrichtung um
dar, wenn man dem Verlauf der Kurve folgt. Eine Umrundung in Uhrzeigerrichtung
ergibt die negative Windungszahl −1.
stellt die Anzahl der Umrundungen entgegen der Uhrzeigerrichtung um
dar, wenn man dem Verlauf der Kurve folgt. Eine Umrundung in Uhrzeigerrichtung
ergibt die negative Windungszahl −1.
| 1 | −1 | 0 | 1 | 2 |
|---|---|---|---|---|
.png) |
 |
.png) |
.png) |
.png) |
Definition
Ist
eine geschlossene Kurve in  und ist ferner
ein Punkt in
und ist ferner
ein Punkt in  der nicht auf
liegt, dann ist die Umlaufzahl von
in Bezug auf
so definiert:
der nicht auf
liegt, dann ist die Umlaufzahl von
in Bezug auf
so definiert:

Die Umlaufzahl  (nach dem englischen index) wird in der Literatur oft auch mit
(nach dem englischen index) wird in der Literatur oft auch mit  oder
oder  bezeichnet. Die Umlaufzahl einer geschlossenen Kurve ist unabhängig vom
Bezugspunkt immer eine ganze Zahl.
bezeichnet. Die Umlaufzahl einer geschlossenen Kurve ist unabhängig vom
Bezugspunkt immer eine ganze Zahl.
Berechnung


Intuitiv lässt sich die Windungszahl mittels
 Anzahl der Umläufe von
um
entgegen dem Uhrzeigersinn − Anzahl der Umläufe von
um
im Uhrzeigersinn
Anzahl der Umläufe von
um
entgegen dem Uhrzeigersinn − Anzahl der Umläufe von
um
im Uhrzeigersinn
berechnen. Die Berechnung über die Definition ist oft nicht ohne Weiteres möglich. Als Beispiel wählen wir den Einheitskreis
![{\displaystyle \gamma \colon [0,2\pi ]\to \mathbb {C} ,\,t\mapsto e^{\mathrm {i} t}}](/svg/31f45394646b8ad711c2dca07ff7c10e301d3fcf.svg)
als Kurve. Nach der intuitiven Regel ist  für alle Punkte
für alle Punkte  in seinem Inneren
in seinem Inneren  und
und  für alle Punkte
für alle Punkte  außerhalb der abgeschlossenen Kreisscheibe
außerhalb der abgeschlossenen Kreisscheibe  .
Letzteres folgt sofort aus dem Integralsatz
von Cauchy und der Definition. Sei nun
.
Letzteres folgt sofort aus dem Integralsatz
von Cauchy und der Definition. Sei nun

Es gilt

Durch Vertauschen von Differentiation und Integration ergibt sich

und weil  eine Stammfunktion des Integranden ist, ist
eine Stammfunktion des Integranden ist, ist  Weil
zusammenhängend
ist, ist also
Weil
zusammenhängend
ist, ist also  für alle
für alle 
Anwendung in der Funktionentheorie
Die Umlaufzahl wird vor allem bei der Berechnung von Kurvenintegralen in der komplexen Zahlenebene verwendet. Sei

eine meromorphe
Funktion mit Singularitäten  dann kann man nach dem Residuensatz
das Integral von
dann kann man nach dem Residuensatz
das Integral von  über eine (durch keine der Singularitäten verlaufende) Kurve
durch
über eine (durch keine der Singularitäten verlaufende) Kurve
durch

berechnen.
Algorithmus
In der algorithmischen Geometrie wird die Umlaufzahl verwendet, um zu bestimmen, ob ein Punkt außerhalb oder innerhalb eines nichteinfachen Polygons (eines Polygons, dessen Kanten sich überschneiden) liegt. Für einfache Polygone vereinfacht sich der Algorithmus zur Even-Odd-Regel.
Für Polygone (geschlossene Kantenzüge) verwendet man zur Berechnung der Umlaufzahl folgenden Algorithmus:
- Suche eine Halbgerade (beginnend beim zu untersuchenden Punkt nach außen), die keine Eckpunkte des Polygons enthält.
- Setze

- Für alle Schnittpunkte der Halbgerade mit dem Polygonzug:
- Schneidet die Halbgerade eine Polygonkante, die „von rechts nach links“
orientiert ist (wenn der Punkt auf der linken Seite der Kante liegt), erhöhe
 um 1.
um 1. - Schneidet die Halbgerade eine Polygonkante, die „von links nach rechts“
orientiert ist (wenn der Punkt auf der rechten Seite der Kante liegt),
verkleinere
um 1.
- Schneidet die Halbgerade eine Polygonkante, die „von rechts nach links“
orientiert ist (wenn der Punkt auf der linken Seite der Kante liegt), erhöhe
-
ist nun die Umlaufzahl des Punktes.
Ist die Umlaufzahl 0, so liegt der Punkt außerhalb des Polygons, sonst innerhalb.
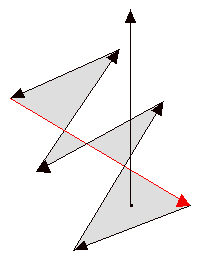
In nebenstehendem Beispiel ist die Halbgerade, mit der gestartet wird, der
senkrechte Pfeil. Er schneidet drei Kanten des Polygons. Bezüglich der roten
Kante liegt der Punkt rechts  Bezüglich der nächsten Kante liegt der Punkt auch rechts
Bezüglich der nächsten Kante liegt der Punkt auch rechts  und bzgl. der letzten Kante liegt der Punkt links
Der Punkt liegt innerhalb des Polygons. Die Polygonfläche ist grau hinterlegt.
und bzgl. der letzten Kante liegt der Punkt links
Der Punkt liegt innerhalb des Polygons. Die Polygonfläche ist grau hinterlegt.
Ein analoger Algorithmus ergibt auch für nicht geradlinig verlaufende (geschlossene) Kurven die Umlaufzahl um einen Punkt, allerdings ist da das Überprüfen der Schnittpunkte nicht so einfach zu implementieren.
Verallgemeinerung für n-dimensionale Mannigfaltigkeiten
Eine Verallgemeinerung für  -dimensionale
Mannigfaltigkeiten stammt von Nikolai Nikolajewitsch Bogoljubow: Unter Benutzung des allgemeinen Stokes’schen
Satzes für
-dimensionale
Mannigfaltigkeiten stammt von Nikolai Nikolajewitsch Bogoljubow: Unter Benutzung des allgemeinen Stokes’schen
Satzes für  kann man
kann man

schreiben.  ist die Einheitskugel
im
ist die Einheitskugel
im  ist die betrachtete
ist die betrachtete  -dimensionale
geschlossene Mannigfaltigkeit, auf der integriert werden soll.
-dimensionale
geschlossene Mannigfaltigkeit, auf der integriert werden soll.
Siehe auch
Literatur
- Eberhard Freitag, Rolf Busam: Funktionentheorie 1. Springer-Verlag, Berlin, ISBN 3-540-67641-4.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 26.12. 2019