Baryzentrische Koordinaten
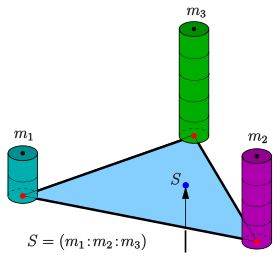
 (blau) sind die Verhältnisse dreier Massen in den Ecken eines Dreiecks (rot),
deren Schwerpunkt
(Massenmittelpunkt) der Punkt
ist. In diesem Beispiel hat
die baryzentrischen Koordinaten
(blau) sind die Verhältnisse dreier Massen in den Ecken eines Dreiecks (rot),
deren Schwerpunkt
(Massenmittelpunkt) der Punkt
ist. In diesem Beispiel hat
die baryzentrischen Koordinaten  .
.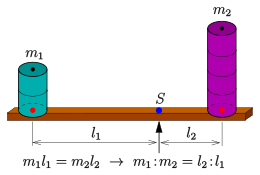
 gleich dem Verhältnis der Strecken
gleich dem Verhältnis der Strecken  ,
die die Lage des Schwerpunktes beschreiben.
,
die die Lage des Schwerpunktes beschreiben.Baryzentrische Koordinaten (auch homogene baryzentrische Koordinaten) dienen in der linearen Algebra und in der Geometrie dazu, die Lage von Punkten in Bezug auf eine gegebene Strecke, ein gegebenes Dreieck, ein gegebenes Tetraeder oder allgemeiner ein gegebenes Simplex zu beschreiben.
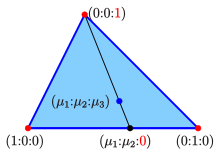
Ebene baryzentrische Koordinaten eines Punktes
kann man sich als Verhältnisse von drei Massen  vorstellen, die sich in den Ecken eines vorgegebenen Dreiecks befinden und deren
Schwerpunkt
ist (siehe Bild). Da es dabei nur auf Verhältnisse ankommt, schreibt man
vorstellen, die sich in den Ecken eines vorgegebenen Dreiecks befinden und deren
Schwerpunkt
ist (siehe Bild). Da es dabei nur auf Verhältnisse ankommt, schreibt man  .
Sind alle Massen gleich, ist
der geometrische
Schwerpunkt des Dreiecks und hat die baryzentrischen Koordinaten
.
Sind alle Massen gleich, ist
der geometrische
Schwerpunkt des Dreiecks und hat die baryzentrischen Koordinaten  .
Ihre geometrische Bedeutung erhalten die baryzentrischen Koordinaten durch die
folgenden Eigenschaften: Im 1-Dimensionalen ist das Massenverhältnis gleich
einem Verhältnis von Teilstrecken (siehe 2. Bild), im 2-Dimensionalen sind
die Massenverhältnisse gleich Flächenverhältnissen von Teildreiecken.
.
Ihre geometrische Bedeutung erhalten die baryzentrischen Koordinaten durch die
folgenden Eigenschaften: Im 1-Dimensionalen ist das Massenverhältnis gleich
einem Verhältnis von Teilstrecken (siehe 2. Bild), im 2-Dimensionalen sind
die Massenverhältnisse gleich Flächenverhältnissen von Teildreiecken.
Baryzentrische Koordinaten wurden zuerst von A. F.
Möbius 1827 in seinem Buch Der baryzentrische Calcul eingeführt.
Sie sind ein Spezialfall homogener
Koordinaten. Ein wesentlicher Unterschied zu den üblichen homogenen
Koordinaten, z.B. in der Ebene, ist die Beschreibung der Ferngerade durch
die Gleichung  statt durch
statt durch  .
.
Insbesondere in der Dreiecksgeometrie spielen die baryzentrischen Koordinaten, neben den trilinearen Koordinaten, eine wesentliche Rolle. Überall, wo es um Verhältnisse von Strecken geht, wie zum Beispiel in dem Satz von Ceva, sind sie ein geeignetes Werkzeug. Aber nicht nur in der Geometrie, sondern auch im Bereich des computer-aided Design verwendet man sie zur Erzeugung von dreieckigen Flächenstücken, den dreieckigen Bézierflächen.
In den Abschnitten Definition und Im Raum werden die in der
Mathematik üblichen Bezeichnungen benutzt. In den Abschnitten Auf einer
Gerade, In einer Ebene werden die Koordinaten mit  bezeichnet, um an ihre Beziehung zu Massen und deren Schwerpunkt zu erinnern,
was für das Verständnis oft eine Hilfe ist.
bezeichnet, um an ihre Beziehung zu Massen und deren Schwerpunkt zu erinnern,
was für das Verständnis oft eine Hilfe ist.
Definition und Eigenschaften
Definition
Es seien  die Ortsvektoren der Ecken
die Ortsvektoren der Ecken  eines Simplex in einem affinen
Raum
eines Simplex in einem affinen
Raum  .
Der affine Raum hat dann die Dimension
.
Der affine Raum hat dann die Dimension  .
Falls es für einen Punkt
.
Falls es für einen Punkt  in
Zahlen
in
Zahlen  gibt, deren Summe nicht Null ist und die Gleichung
gibt, deren Summe nicht Null ist und die Gleichung
- (G)

erfüllt, sagt man  sind baryzentrische Koordinaten des Punktes
sind baryzentrische Koordinaten des Punktes  bezüglich der Punkte
bezüglich der Punkte  und schreibt
und schreibt  .
Für die Ecken gilt offensichtlich
.
Für die Ecken gilt offensichtlich
 .
.
Baryzentrische Koordinaten sind nicht eindeutig: Für jedes  ungleich Null beschreibt auch
ungleich Null beschreibt auch  den Punkt .
D.h.: Nur die Verhältnisse der Koordinaten sind wesentlich. An diese Eigenschaft
soll die Schreibweise mit
den Punkt .
D.h.: Nur die Verhältnisse der Koordinaten sind wesentlich. An diese Eigenschaft
soll die Schreibweise mit  erinnern. Man kann baryzentrische Koordinaten als homogene
Koordinaten eines
erinnern. Man kann baryzentrische Koordinaten als homogene
Koordinaten eines  -dimensionalen
projektiven Raums
-dimensionalen
projektiven Raums  auffassen, von dem der affine Raum
ein Teil ist. Und zwar sind die Punkte von
diejenigen Punkte von ,
die nicht in der durch die Gleichung
auffassen, von dem der affine Raum
ein Teil ist. Und zwar sind die Punkte von
diejenigen Punkte von ,
die nicht in der durch die Gleichung  bestimmten Hyperebene (Fernhyperebene)
liegen.
bestimmten Hyperebene (Fernhyperebene)
liegen.
Gleichung (G) ist ein unterbestimmtes homogenes lineares Gleichungssystem, das sich in der üblichen Form
- (G')

schreiben lässt.
Erfüllen die Koordinaten  zusätzlich die Normierungsbedingung
zusätzlich die Normierungsbedingung
- (N)

so spricht man von normierten baryzentrischen Koordinaten. In diesem
Fall sind die Zahlen  eindeutig bestimmt (s. unten) und man kann den Punkt
(Ursprungsgerade) auch als affinen Punkt
eindeutig bestimmt (s. unten) und man kann den Punkt
(Ursprungsgerade) auch als affinen Punkt  der Hyperebene des
der Hyperebene des  mit der Gleichung
mit der Gleichung  auffassen. Um die Normierung formal sicher zu stellen, kann man (N) nach
einer Koordinate auflösen und in das n-tupel einfügen. Löst man z.B. nach
auffassen. Um die Normierung formal sicher zu stellen, kann man (N) nach
einer Koordinate auflösen und in das n-tupel einfügen. Löst man z.B. nach
 auf, ergibt sich
auf, ergibt sich  .
.
Hinweis: Die Begriffe werden nicht einheitlich verwendet. Viele
Autoren sprechen nur dann von baryzentrischen Koordinaten, wenn die
Normierungsbedingung erfüllt ist.
Normierte baryzentrische Koordinaten lassen
sich einfach ermitteln, indem man jede einzelne baryzentrische Koordinate durch
die Summe der Koordinaten dividiert.
Eigenschaften
Punkt im Simplex:
Falls die Koordinaten positiv sind, so liegt der
Punkt
in der konvexen
Hülle von ,
also im Simplex mit diesen Eckpunkten. Die Darstellung eines Punktes innerhalb
einer konvexen Hülle als Summe von Eckpunkten eines Simplex wird affine
Kombination oder baryzentrische Kombination genannt.
Massenmittelpunkt:
Wie man aus der Umstellung
- (S)

der Definitionsgleichung (G) sieht, kann man
als Massenmittelpunkt
(das Baryzentrum) einer
Anordnung von Massen
an den Eckpunkten
des Simplex auffassen. Dies ist der Ursprung des Begriffs
baryzentrisch.
Physikalische Bedeutung der
Gleichung (G):
Die Gesamtmasse im Schwerpunkt
verursacht im Nullpunkt dasselbe Drehmoment wie die Einzelmassen,
Gleichung
(G'): Die Summe der von den Einzelmassen erzeugten Drehmomente ist im
Schwerpunkt
gleich 0.
Mittelpunkt zweier Punkte:
Sind  die normierten (!) baryzentrischen Darstellungen zweier Punkte
die normierten (!) baryzentrischen Darstellungen zweier Punkte  ,
dann hat der Mittelpunkt
,
dann hat der Mittelpunkt  die baryzentrische Darstellung
die baryzentrische Darstellung

Existenz, Eindeutigkeit normierter Koordinaten:
Normierte
baryzentrische Koordinaten sind eindeutig bestimmt. Denn, versucht man das durch
(G') und (N) beschriebene inhomogene lineare
Gleichungssystem mit Hilfe der Cramerschen
Regel zu lösen, ist die Determinante im Nenner ungleich Null, da sie, bis
auf einen Faktor, im ebenen Fall (n=3) die orientierte Fläche des Dreiecks und
im 3-dimensionalen Fall (n=4) das orientierte Volumen des Tetraeders ist (siehe
unten).
Lässt man die Bedingung (N) wieder fallen, hat das lineare homogene
System (G') 1-dimensionale Lösungen (Punkte des oben erwähnten
projektiven Raums ).
Für größeres  gilt Entsprechendes.
gilt Entsprechendes.
Unabhängigkeit von Nullpunkt und Skalierung:
Dass die
baryzentrischen Koordinaten nicht von dem zufällig gewählten Nullpunkt des
affinen Raums
abhängen, erkennt man dadurch, dass eine Verschiebung der Vektoren  um einen festen Vektor
um einen festen Vektor  die Definitionsgleichung (G) unverändert lässt. Dasselbe gilt für eine
uniforme Skalierung (Multiplikation der Vektoren mit einem festen Faktor
ungleich Null).
die Definitionsgleichung (G) unverändert lässt. Dasselbe gilt für eine
uniforme Skalierung (Multiplikation der Vektoren mit einem festen Faktor
ungleich Null).
Beispiel:
In der Ebene besteht ein Simplex aus 3 Punkten (Dreieck),
d.h. es ist  und jeder Punkt hat 3 baryzentrische Koordinaten:
und jeder Punkt hat 3 baryzentrische Koordinaten:  .
Zum Beispiel hat der geometrische
Schwerpunkt des Dreiecks die baryzentrische Darstellung
.
Zum Beispiel hat der geometrische
Schwerpunkt des Dreiecks die baryzentrische Darstellung  ,
denn es ist
,
denn es ist  Die normierte Darstellung ist
Die normierte Darstellung ist 
Vorteil, Nachteil:
Wie man in dem Beispiel sieht, lassen sich
wesentliche Punkte z.B. von Dreiecken einheitlich und einfach beschreiben.
Bei Berechnungen müssen nicht die speziellen (affinen) Koordinaten eines
gegebenen Dreiecks berücksichtigt werden. Wie man affine Koordinaten in
baryzentrische Koordinaten umrechnet, wird in den folgenden Abschnitten gezeigt.
Ein gewisser Nachteil baryzentrischer Koordinaten ist allerdings: Sie sind nicht
eindeutig (im nicht normierten Fall) und es gibt immer 1 Koordinate mehr als die
affinen Koordinaten.
Unterschied zu anderen homogenen Koordinaten: Beispiel n=3
Üblicherweise führt man homogene Koordinaten so ein, dass die Ferngerade durch
eine Koordinatenebene, z.B. durch  ,
beschrieben wird. Dies hat den Vorteil, dass ein einfacher Zusammenhang zu den
affinen Koordinaten, die die zugehörige affine Ebene (projektive Ebene ohne die
Punkte der Ferngerade) beschreiben, besteht: Ein affiner Punkt hat die
Koordinaten
,
beschrieben wird. Dies hat den Vorteil, dass ein einfacher Zusammenhang zu den
affinen Koordinaten, die die zugehörige affine Ebene (projektive Ebene ohne die
Punkte der Ferngerade) beschreiben, besteht: Ein affiner Punkt hat die
Koordinaten  .
Es besteht allerdings der Nachteil, dass die zu den Koordinatenachsen gehörigen
projektiven Punkte
.
Es besteht allerdings der Nachteil, dass die zu den Koordinatenachsen gehörigen
projektiven Punkte  keine affinen Punkte sind. Nur der Punkt
keine affinen Punkte sind. Nur der Punkt  wird zu einem affinen Punkt. Baryzentrische Koordinaten haben keine so einfache
Beziehung zu den affinen Koordinaten. Dafür liegen alle den Koordinatenachsen
entsprechenden projektiven Punkte
wird zu einem affinen Punkt. Baryzentrische Koordinaten haben keine so einfache
Beziehung zu den affinen Koordinaten. Dafür liegen alle den Koordinatenachsen
entsprechenden projektiven Punkte  im affinen Bereich, denn die Ferngerade wird hier durch die Gleichung
im affinen Bereich, denn die Ferngerade wird hier durch die Gleichung  beschrieben.
beschrieben.
Auf einer Gerade (n=2, Strecke)
Der Schwerpunkt  zweier Massen ,
die auf der
zweier Massen ,
die auf der  -Achse
an den Stellen
-Achse
an den Stellen  platziert sind, ist die Stelle
platziert sind, ist die Stelle  ,
wo das Hebelgesetz
(Kraft x Kraftarm = Last x Lastarm, siehe 2. Bild) erfüllt ist. Genauer:
Wo die Summe der Drehmomente
gleich Null ist
und damit gilt:
,
wo das Hebelgesetz
(Kraft x Kraftarm = Last x Lastarm, siehe 2. Bild) erfüllt ist. Genauer:
Wo die Summe der Drehmomente
gleich Null ist
und damit gilt:
- (G'2)

Diese Gleichung ist äquivalent zu (siehe Abschnitt Definition)
- (G2)

Auflösen nach
ergibt:
- (S2)

Lässt man negative Massen zu, z.B.  ,
so ergibt sich aus (G2) für
,
so ergibt sich aus (G2) für  die Gesamtmasse
die Gesamtmasse  und
und  .
.
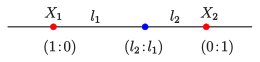
Eine Lösung von (G'2) ist  .
Alle Lösungen sind Vielfache davon. Also hat der Schwerpunkt die baryzentrische
Darstellung (siehe Abschnitt Definition)
.
Alle Lösungen sind Vielfache davon. Also hat der Schwerpunkt die baryzentrische
Darstellung (siehe Abschnitt Definition)
- (B2)

Dabei ist 
 hat die baryzentrischen Koordinaten
hat die baryzentrischen Koordinaten 
Dieser einfache Zusammenhang der baryzentrischen Koordinaten mit
Verhältnissen von Teilstrecken ist der Grund für ihre Bedeutung in der
Dreiecksgeometrie.
Die Aussage (B2) ist der Lehrsatz in §21,
S. 25, des Buches von Möbius.
Die normierten baryzentrischen Koordinaten müssen zusätzlich zu (G'2) die Bedingung
- (N2)

erfüllen. Löst man das inhomogene Gleichungssystem bestehend aus den Gleichungen (G'2), (N2) mit Hilfe der Cramerschen Regel, ergibt sich die normierte Darstellung
- (NB2)

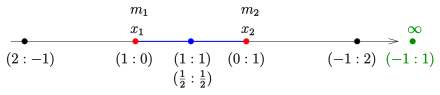
Beispiel: Der Mittelpunkt  der Punkte
besitzt die baryzentrischen Koordinaten
der Punkte
besitzt die baryzentrischen Koordinaten  und in normierter Darstellung
und in normierter Darstellung 
In einer Ebene (n=3, Dreieck)
Umrechnung der Koordinaten
Sind in den Ecken eines Dreiecks  drei Massen
platziert, so sind die Gleichgewichtsgleichungen für die Drehmomente um die
Koordinatenachsen
drei Massen
platziert, so sind die Gleichgewichtsgleichungen für die Drehmomente um die
Koordinatenachsen
- (G'3)

oder in der Form (siehe Definition)
- (G3)

Der Schwerpunkt hat die Koordinaten
- (S3)

Baryzentrische Koordinaten eines gegebenen Punktes  ,
erhält man durch Lösen des unterbestimmten homogenen Systems (G'3) nach
.
Nimmt man die Normierungsgleichung
,
erhält man durch Lösen des unterbestimmten homogenen Systems (G'3) nach
.
Nimmt man die Normierungsgleichung
-
- (N3)

- (N3)
- hinzu, ist das jetzt inhomogene LGS eindeutig und mit Hilfe der Cramerschen Regel lösbar. Es ergibt sich:


-
- (NB3)

- (NB3)
- Der gemeinsame Nenner ist der doppelte Flächeninhalt des Dreiecks, also ungleich Null.
- Wegen
 genügt es, zwei der drei Brüche zu berechnen.
genügt es, zwei der drei Brüche zu berechnen. - Alle Zähler lassen sich als
 -Determinanten
schreiben. Verzichtet man auf die Normierung, darf bei den baryzentrischen
Koordinaten der gemeinsame Nenner weggelassen werden:
-Determinanten
schreiben. Verzichtet man auf die Normierung, darf bei den baryzentrischen
Koordinaten der gemeinsame Nenner weggelassen werden:
- (B3)

- Multipliziert man jede Determinante mit
 ,
entstehen die orientierten Flächen
,
entstehen die orientierten Flächen
 der Teildreiecke
der Teildreiecke  ,
,
 ,
,
 (siehe auch den nächsten Abschnitt Beziehung zu trilineare
Koordinaten). Damit gilt:
(siehe auch den nächsten Abschnitt Beziehung zu trilineare
Koordinaten). Damit gilt: - (BF3)

Aussage (BF3) ist der Lehrsatz in §23, S. 26, des Buches von Möbius.
Spezialfall: Koordinatendreieck:
Für das spezielle rechtwinklige Dreieck  als Bezugsdreieck hat ein Punkt
als Bezugsdreieck hat ein Punkt  die einfachen baryzentrischen Koordinaten
die einfachen baryzentrischen Koordinaten  .
.
Geraden, Schnittpunkte, Parallelität
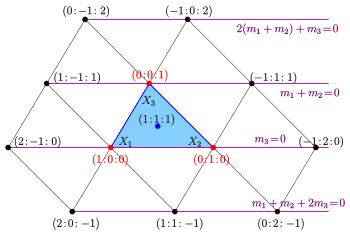
 befinden sich die Massen .
befinden sich die Massen .
Die lilafarbigen parallelen Geraden haben die jeweils angegebenen Gleichungen. Ihr gemeinsamer Fernpunkt hat die Koordinaten

Die Koordinaten der Rasterpunkte sind normiert.
- Die Ecken des Dreiecks haben die homogenen Koordinaten
 .
.
- Die Gerade durch die Punkte
wird durch die Gleichung
 beschrieben und hat den Fernpunkt
beschrieben und hat den Fernpunkt  . …
. … - Die Ferngerade ist durch die Gleichung
 festgelegt.
festgelegt. - Eine beliebige Gerade wird durch eine Gleichung
 beschrieben (s. homogene Koordinaten).
beschrieben (s. homogene Koordinaten). - Drei Geraden



- haben einen Punkt gemeinsam, wenn
 .
.
- Zwei Geraden
 sind parallel, wenn sie sich auf der Ferngerade schneiden, d.h.,
wenn
sind parallel, wenn sie sich auf der Ferngerade schneiden, d.h.,
wenn
 .
.
- Drei Punkte ,
 und
und  liegen genau dann auf einer Geraden, wenn
liegen genau dann auf einer Geraden, wenn

- Hieraus ergibt sich die Gleichung
einer Gerade durch zwei vorgegebene Punkte
 in Determinantenform:
in Determinantenform:

Beziehung zu trilinearen Koordinaten

Für die Flächen
der Teildreiecke in (BF3) gilt  ,
wobei
,
wobei  die Grundseiten (Seiten des Dreiecks) und die Höhen der Teildreiecke sind (siehe
Bild). Also gilt
die Grundseiten (Seiten des Dreiecks) und die Höhen der Teildreiecke sind (siehe
Bild). Also gilt
- (BT3)

Die Beziehung (BT3) zeigt den einfachen Zusammenhang der
baryzentrischen Koordinaten mit den trilinearen
Koordinaten  eines Punktes. Für ein gleichseitiges
Dreieck sind die baryzentrischen und trilinearen Koordinaten gleich. Die
Ferngerade hat in baryzentrischen Koordinaten die Gleichung .
In trilinearen Koordinaten ist die Gleichung noch von den Seitenlängen
eines Punktes. Für ein gleichseitiges
Dreieck sind die baryzentrischen und trilinearen Koordinaten gleich. Die
Ferngerade hat in baryzentrischen Koordinaten die Gleichung .
In trilinearen Koordinaten ist die Gleichung noch von den Seitenlängen  des Dreiecks abhängig:
des Dreiecks abhängig: 
Besondere Punkte, Eulergerade
- geometrischer Schwerpunkt
ist der geometrische Schwerpunkt, wenn alle Massen gleich sind. Seine
baryzentrischen Koordinaten sind also  Wegen (BF3) und
Wegen (BF3) und  gilt
gilt
 und
und 
(Siehe hierzu auch Geometrischer Schwerpunkt.)
- Parameterdarstellung einer Gerade
Eine Gerade durch zwei Punkte  hat für Punkte
hat für Punkte  die Darstellung
die Darstellung

- Projektion auf eine Seite
Projiziert man einen Punkt  von der Ecke
von der Ecke  aus auf die gegenüberliegende Seite (die Gerade hat die Gleichung ),
so erhält man den Punkt
aus auf die gegenüberliegende Seite (die Gerade hat die Gleichung ),
so erhält man den Punkt  (siehe Bild). Sind die Koordinaten von
normiert, teilt
die Strecke
(siehe Bild). Sind die Koordinaten von
normiert, teilt
die Strecke  im Verhältnis
im Verhältnis
 .
Ist z.B. der Punkt der geometrische Schwerpunkt ,
so wird er auf die Seitenmitte
.
Ist z.B. der Punkt der geometrische Schwerpunkt ,
so wird er auf die Seitenmitte  projiziert und teilt die Strecke
projiziert und teilt die Strecke  im Verhältnis
im Verhältnis  .
.
Entsprechendes gilt für die Projektionen von den anderen Ecken aus.
- Inkreismittelpunkt, Ankreismittelpunkte

Die Flächeninhalte der Dreiecke
 und
und  haben verschiedene Vorzeichen
haben verschiedene VorzeichenFür den Inkreis des Dreiecks gilt  (Inkreisradius) und damit (s. (BT3)) hat der Inkreismittelpunkt die
baryzentrischen Koordinaten
(Inkreisradius) und damit (s. (BT3)) hat der Inkreismittelpunkt die
baryzentrischen Koordinaten  und wegen
und wegen  gilt
gilt  Mit Hilfe des Sinussatzes
ergibt sich für den Inkreismittelpunkt auch eine Darstellung mit den Winkeln:
Mit Hilfe des Sinussatzes
ergibt sich für den Inkreismittelpunkt auch eine Darstellung mit den Winkeln:

wobei  der Winkel bei
der Winkel bei  ist.
ist.
Die Winkelhalbierende der Ecke  (Gerade
(Gerade  )
hat die Gleichung
)
hat die Gleichung

Sie schneidet die Seite  (Gleichung )
im Punkt
(Gleichung )
im Punkt  .
(
.
( kann auch als Projektion von
kann auch als Projektion von  auf die Seite
angesehen werden.) Wegen (B2) gilt:
auf die Seite
angesehen werden.) Wegen (B2) gilt:
 Analog für die anderen Winkelhalbierenden.
Analog für die anderen Winkelhalbierenden.
Dies ist der Winkelhalbierendensatz
für das Dreieck
.
Da die Dreiecksflächen orientiert sind, kann  und damit auch
und damit auch  negative Werte annehmen, jenachdem, ob
auf derselben Seite der zu
gehörigen Dreiecksseite liegt wie die Ecke
oder nicht. Beim Inkreismittelpunkt haben alle
dasselbe Vorzeichen. Bei einem Ankreismittelpunkt
haben (wie beim Inkreismittelpunkt) alle Abstände die Länge des Ankreisradius,
aber einer der Abstände hat ein von den beiden anderen verschiedenes Vorzeichen.
Damit ergeben sich die baryzentrischen Darstellungen der Ankreismittelpunkte:
negative Werte annehmen, jenachdem, ob
auf derselben Seite der zu
gehörigen Dreiecksseite liegt wie die Ecke
oder nicht. Beim Inkreismittelpunkt haben alle
dasselbe Vorzeichen. Bei einem Ankreismittelpunkt
haben (wie beim Inkreismittelpunkt) alle Abstände die Länge des Ankreisradius,
aber einer der Abstände hat ein von den beiden anderen verschiedenes Vorzeichen.
Damit ergeben sich die baryzentrischen Darstellungen der Ankreismittelpunkte:

Analog zum Inkreisradius ergibt sich für die Ankreisradien:

 :
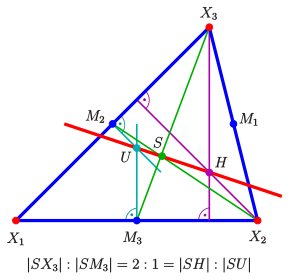
Nagel-Punkt. Er liegt mit dem geometrischen Schwerpunkt
und dem Inkreismittelpunkt
auf einer Gerade.
teilt die Strecke
:
Nagel-Punkt. Er liegt mit dem geometrischen Schwerpunkt
und dem Inkreismittelpunkt
auf einer Gerade.
teilt die Strecke  im Verhältnis 2:1
im Verhältnis 2:1- Nagelpunkt
Aus der Beschreibung der Lage der Berührpunkte der Ankreise auf den Dreiecksseiten erkennt man ihre baryzentrische Darstellung:



 ist offensichtlich die Projektion (siehe oben) des Punktes
ist offensichtlich die Projektion (siehe oben) des Punktes

von der Ecke
aus auf die gegenüberliegende Seite. D.h.:
- Die drei Geraden
 schneiden sich im Punkt ,
dem Nagel-Punkt.
schneiden sich im Punkt ,
dem Nagel-Punkt.
Die Matrix

beschreibt (in baryzentrischen Koordinaten) die zentrische Streckung am
geometrischen Schwerpunkt
mit dem Faktor  (siehe Abschnitt Steiner-Ellipse,
Steiner-Inellipse). Bildet man
damit ab, erhält man den Inkreismittelpunkt .
Dies zeigt:
(siehe Abschnitt Steiner-Ellipse,
Steiner-Inellipse). Bildet man
damit ab, erhält man den Inkreismittelpunkt .
Dies zeigt:
- Die Punkte
 liegen auf einer Gerade durch
und
teilt die Strecke
im Verhältnis 2:1.
liegen auf einer Gerade durch
und
teilt die Strecke
im Verhältnis 2:1.
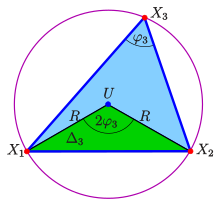

- Umkreismittelpunkt
Der Umkreismittelpunkt
hat zu den Ecken den gleichen Abstand  ,
den Umkreisradius. Der Winkel bei
im Teildreieck
,
den Umkreisradius. Der Winkel bei
im Teildreieck  ist wegen des Kreiswinkelsatzes
doppelt so groß wie der Winkel
ist wegen des Kreiswinkelsatzes
doppelt so groß wie der Winkel  bei .
Also ist die Fläche
bei .
Also ist die Fläche
 .
Entsprechendes gilt für
.
Entsprechendes gilt für  .
Damit sind die baryzentrischen Koordinaten des Umkreismittelpunktes
.
Damit sind die baryzentrischen Koordinaten des Umkreismittelpunktes

Aus  und den Kosinussätzen für die drei
Winkel ergibt sich die winkelfreie Darstellung
und den Kosinussätzen für die drei
Winkel ergibt sich die winkelfreie Darstellung

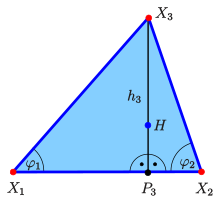

- Höhenschnittpunkt
Ist  der Höhenschnittpunkt, so ist
der Höhenschnittpunkt, so ist  der Fußpunkt der Höhe
der Fußpunkt der Höhe  (siehe Bild) und es gilt
(siehe Bild) und es gilt  Wegen (B2) ist
Wegen (B2) ist  Analog ergeben sich die anderen Verhältnisse. Damit hat der Höhenschnittpunkt
die baryzentrischen Koordinaten
Analog ergeben sich die anderen Verhältnisse. Damit hat der Höhenschnittpunkt
die baryzentrischen Koordinaten

Falls ein Winkel  ist, z.B.
ist, z.B.  ,
so ist
,
so ist  .
.
- Spieker-Punkt
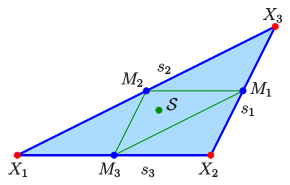
Belegt man die Seiten  eines Dreiecks
gleichmäßig mit Masse, so nennt man den zugehörigen Kantenschwerpunkt Spieker-Punkt. (Ecken-
und Flächenschwerpunkt eines Dreiecks sind
identisch: der Schnittpunkt der Seitenhalbierenden.) Denkt man sich die
Masse einer Seite in ihrem Schwerpunkt, dem Mittelpunkt
eines Dreiecks
gleichmäßig mit Masse, so nennt man den zugehörigen Kantenschwerpunkt Spieker-Punkt. (Ecken-
und Flächenschwerpunkt eines Dreiecks sind
identisch: der Schnittpunkt der Seitenhalbierenden.) Denkt man sich die
Masse einer Seite in ihrem Schwerpunkt, dem Mittelpunkt  konzentriert, so ist der Spieker-Punkt
konzentriert, so ist der Spieker-Punkt  der Schwerpunkt des Dreiecks
der Schwerpunkt des Dreiecks  mit den Seitenlängen
mit den Seitenlängen  als Massenbelegungen in den Ecken. Aus
als Massenbelegungen in den Ecken. Aus  und (S3) folgt:
und (S3) folgt:


Analog ergibt sich die y-Koordinate.
Hieraus erkennt man die baryzentrischen Koordinaten des Spieker-Punktes:

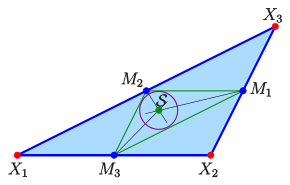
Bedeutung von  für das Dreieck :
für das Dreieck :
Aus den obigen Überlegungen (Masse
im Punkt )
folgt direkt die baryzentrische Darstellung von
bezüglich des (grünen) Dreiecks :

Da  die Länge der dem Punkt
gegenüberliegenden (grünen) Seite ist, ist
der Inkreismittelpunkt = Schnittpunkt der Winkelhalbierenden des Dreiecks
(siehe oben). Diese Eigenschaft liefert die Möglichkeit den Punkt
zeichnerisch zu bestimmen.
die Länge der dem Punkt
gegenüberliegenden (grünen) Seite ist, ist
der Inkreismittelpunkt = Schnittpunkt der Winkelhalbierenden des Dreiecks
(siehe oben). Diese Eigenschaft liefert die Möglichkeit den Punkt
zeichnerisch zu bestimmen.
- Eulergerade
Der geometrische Schwerpunkt ,
der Umkreismittelpunkt
und der Höhenschnittpunkt
liegen auf einer Gerade, der Eulergerade.
Denn, führt man am Punkt
eine zentrische
Streckung mit Streckfaktor
durch, wird jede Ecke auf den Mittelpunkt der ihr gegenüberliegenden Seite
abgebildet (
teilt jede Seitenhalbierende im Verhältnis 2:1) und die Höhen werden auf die
Mittelsenkrechten abgebildet. Also geht
in
über und beide Punkte liegen auf einer gemeinsamen Gerade durch .
Der Umkreis geht dabei in den Kreis durch die Seitenmitten, den Feuerbachkreis, über,
dessen Mittelpunkt (Bild von )
also auch auf der Eulergerade liegt.
Die Gleichung der Eulergerade in baryzentrischen Koordinaten ist (s. oben)


oder unter Verwendung von Punkt :

Gleichseitige Dreiecke besitzen keine Eulergerade, da  ist.
ist.
Ist das Dreieck gleichschenklig, aber nicht gleichseitig, z.B.
 ,
so hat die Eulergerade die Gleichung
,
so hat die Eulergerade die Gleichung  und ist gleich der Seitenhalbierenden durch .
Sie enthält dann auch den Inkreismittelpunkt.
und ist gleich der Seitenhalbierenden durch .
Sie enthält dann auch den Inkreismittelpunkt.
Ist das Dreieck rechtwinklig, z.B. ,
so ist  und die Eulergerade hat die Gleichung
und ist die Seitenhalbierende zur Hypotenuse.
und die Eulergerade hat die Gleichung
und ist die Seitenhalbierende zur Hypotenuse.
Satz von Ceva
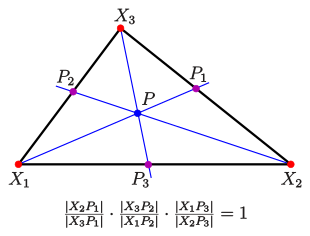
Ist P ein Punkt innerhalb des Dreiecks
und  der Schnittpunkt der Gerade
der Schnittpunkt der Gerade  mit der Seite
mit der Seite  (siehe Bild), so gilt
(siehe Bild), so gilt

- Beweis
Mit den Punkten in baryzentrischen Koordinaten:


ist  (siehe Besondere Punkte). Aus B2 erhält man
(siehe Besondere Punkte). Aus B2 erhält man  Führt man diese Überlegungen auch für diePunkte
Führt man diese Überlegungen auch für diePunkte  durch, ergibt sich
durch, ergibt sich

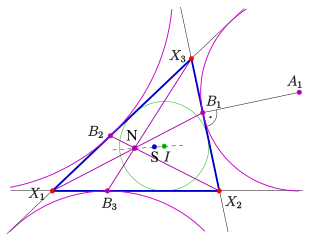
Steiner-Ellipse, Steiner-Inellipse
Die eindeutig bestimmte Ellipse durch die Ecken des (beliebigen) Dreiecks
,
deren Mittelpunkt der geometrische Schwerpunkt
ist, heißt Steiner-Ellipse.
In baryzentrischen Koordinaten wird sie durch die Gleichung
- (SE)

beschrieben.
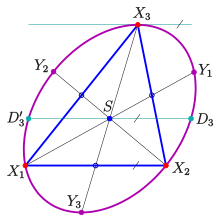
Man prüft leicht nach, dass die sechs Punkte


die Gleichung (SE) erfüllen und, dass der Schwerpunkt  der Mittelpunkt (siehe Abschnitt Definition) der Paare
der Mittelpunkt (siehe Abschnitt Definition) der Paare  ist. Die Gleichung (SE) muss also einen nicht ausgearteten Kegelschnitt
ist. Die Gleichung (SE) muss also einen nicht ausgearteten Kegelschnitt
 (Ellipse oder Hyperbel oder Parabel) beschreiben. Da aus den Gleichungen
(Ellipse oder Hyperbel oder Parabel) beschreiben. Da aus den Gleichungen
 der Widerspruch
der Widerspruch


folgt, hat
mit der Ferngerade keinen Punkt gemeinsam, d.h.
ist eine Ellipse.
Die Spiegelung am Punkt
lässt das Sechseck  und damit auch die Ellipse invariant (Eine Ellipse ist durch 5 ihrer Punkte
eindeutig bestimmt). Also ist der Symmetriepunkt
der Mittelpunkt der Ellipse.
und damit auch die Ellipse invariant (Eine Ellipse ist durch 5 ihrer Punkte
eindeutig bestimmt). Also ist der Symmetriepunkt
der Mittelpunkt der Ellipse.
Da der Mittelpunkt  der Sehne
auf dem Durchmesser
liegt, muss die Tangente in
parallel zu
sein (siehe Ellipse).
Sie hat die Gleichung .
Schneidet man die Parallele zur Tangente durch den Mittelpunkt
(sie hat die Gleichung
der Sehne
auf dem Durchmesser
liegt, muss die Tangente in
parallel zu
sein (siehe Ellipse).
Sie hat die Gleichung .
Schneidet man die Parallele zur Tangente durch den Mittelpunkt
(sie hat die Gleichung  )
mit der Ellipse (SE) erhält man die zwei zu
konjugierten Punkte (siehe Steiner-Ellipse)
)
mit der Ellipse (SE) erhält man die zwei zu
konjugierten Punkte (siehe Steiner-Ellipse)

Entsprechendes gilt für die Tangenten in den anderen Ecken.
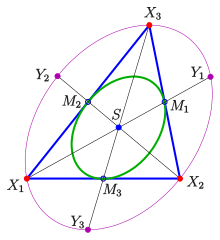
Bildet man die Steiner-Ellipse mit der zentrischen Streckung  an ihrem Mittelpunkt
mit Faktor
ab, erhält man also eine Ellipse mit demselben Mittelpunkt ,
die die Dreiecksseiten in deren Mittelpunkten berührt. Dies ist die Steiner-Inellipse des
Dreiecks. Wegen
an ihrem Mittelpunkt
mit Faktor
ab, erhält man also eine Ellipse mit demselben Mittelpunkt ,
die die Dreiecksseiten in deren Mittelpunkten berührt. Dies ist die Steiner-Inellipse des
Dreiecks. Wegen  ist die Abbildungsmatrix von
ist die Abbildungsmatrix von

Transformiert man die Gleichung (SE) der Steiner-Ellipse mit dieser Matrix, ergibt sich die Gleichung der Steiner-Inellipse in baryzentrischen Koordinaten:
- (SIE)

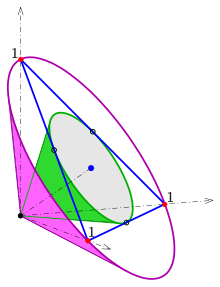
- 3d-Darstellungen
1) Die durch die Gleichung (SE) definierte Quadrik  im
im  mit (wie üblich) orthogonalen Koordinatenachsen ist ein gerader Kreiskegel mit dem Nullpunkt
als Spitze, der die Koordinatenachsen enthält und die Gerade
mit (wie üblich) orthogonalen Koordinatenachsen ist ein gerader Kreiskegel mit dem Nullpunkt
als Spitze, der die Koordinatenachsen enthält und die Gerade  als Achse besitzt. Denn für die Schnittkurve der Ebene
und der Quadrik mit der Gleichung (SE) gilt
als Achse besitzt. Denn für die Schnittkurve der Ebene
und der Quadrik mit der Gleichung (SE) gilt


D.h.: die Schnittkurve ist auch ein ebener Schnitt der Einheitskugel und damit ein Kreis (im Bild lila).
2) Analoge Überlegungen für die durch die Gleichung (SIE) definierte
Quadrik  zeigen:
ist auch ein gerader Kreiskegel mit dem Nullpunkt als Spitze und der Gerade
als Achse. Der Basiskreis ist der Schnitt der Ebene
mit der kleineren Kugel
zeigen:
ist auch ein gerader Kreiskegel mit dem Nullpunkt als Spitze und der Gerade
als Achse. Der Basiskreis ist der Schnitt der Ebene
mit der kleineren Kugel  (im Bild grün). Schneidet man den Kegel
mit der Koordinatenebene
(im Bild grün). Schneidet man den Kegel
mit der Koordinatenebene  ,
ergibt sich die Ursprungsgerade
,
ergibt sich die Ursprungsgerade  ,
d.h. der Kegel berührt die Koordinatenebene. Dies gilt auch für die
anderen Koordinatenebenen.
,
d.h. der Kegel berührt die Koordinatenebene. Dies gilt auch für die
anderen Koordinatenebenen.
3) In normierten baryzentrischen Koordinaten (d.h. in der Ebene
)
erscheint das gegebene Dreieck gleichseitig und die Steiner-Ellipsen sind
dessen Umkreis und Inkreis.
4) Setzt man keine orthogonalen Koordinaten des
voraus, gilt nur: Die Kegel sind elliptisch, das Dreieck ist allgemein und die
Kreise sind Ellipsen. Inzidenzen und Berührbeziehungen bleiben erhalten.
5) Wählt man, wie bei nicht baryzentrischen homogenen Koordinaten
üblich, die Ursprungsebene
als Ferngerade und setzt  ,
so beschreibt die Gleichung (SE) im affinen Bereich (
,
so beschreibt die Gleichung (SE) im affinen Bereich ( )
die Hyperbel
)
die Hyperbel  .
In diesem Fall sind die Punkte
Fernpunkte und zwar die Fernpunkte der Asymptoten. Im
kann man sich die Hyperbel als Schnittkurve des Kegels
mit der Ebene
.
In diesem Fall sind die Punkte
Fernpunkte und zwar die Fernpunkte der Asymptoten. Im
kann man sich die Hyperbel als Schnittkurve des Kegels
mit der Ebene  vorstellen.
vorstellen.
6) Siehe hierzu auch: Inellipse.
Im Raum (n=4, Tetraeder)
Berechnung und Eigenschaften
Im 3-dimensionalen Raum ist ein Simplex ein Tetraeder
mit den Ecken  .
Um die baryzentrischen Koordinaten eines Punktes
.
Um die baryzentrischen Koordinaten eines Punktes  bezgl. des gegebenen Tedraeders zu bestimmen, muss man, analog dem
2-dimensionalen Fall (Dreieck), das homogene lineare Gleichungssystem (siehe
Abschnitt Definition)
bezgl. des gegebenen Tedraeders zu bestimmen, muss man, analog dem
2-dimensionalen Fall (Dreieck), das homogene lineare Gleichungssystem (siehe
Abschnitt Definition)
- (G'4)

für  lösen. Wie im ebenen Fall fügt man hier auch die Normierungsgleichung
lösen. Wie im ebenen Fall fügt man hier auch die Normierungsgleichung  hinzu und löst das LGS mit Hilfe der Cramerschen Regel. Mit den Abkürzungen
hinzu und löst das LGS mit Hilfe der Cramerschen Regel. Mit den Abkürzungen


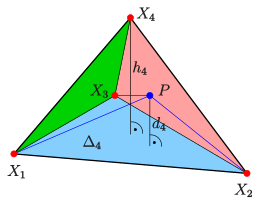
erhält man für die baryzentrischen Koordinaten von :
- (BV4)

Dabei ist  das Volumen des Teiltetraeders, der aus dem gegebenen Tetraeder entsteht, indem
man
das Volumen des Teiltetraeders, der aus dem gegebenen Tetraeder entsteht, indem
man  durch
ersetzt (s. Bild).
durch
ersetzt (s. Bild).
Aussage (BV4) ist der Lehrsatz in §25, S. 28, des Buches von Möbius.
Ist
die Grundfläche (Seitenfläche des Tedraeders) und
die Höhe des  -ten
Teiltetraeders, so gilt
-ten
Teiltetraeders, so gilt  und
und

Besondere Punkte
- Geometrischer Schwerpunkt
Der geometrische Schwerpunkt hat die baryzentrischen Koordinaten  .
Damit ist
.
Damit ist

wobei  das Volumen des gegebenen Tetraeders und
das Volumen des gegebenen Tetraeders und  die Höhe des -ten
Punktes über dem -ten
Seitendreieck (s. Bild) ist. Also gilt:
die Höhe des -ten
Punktes über dem -ten
Seitendreieck (s. Bild) ist. Also gilt:

(Vergleiche die entsprechende Aussage im ebenen Fall.)
- Inkugelmittelpunkt
Für den Mittelpunkt der Inkugel
ist
(Radius der Inkugel) und damit
 und
und
wobei  das Volumen des gegebenen Tetraeders ist.
das Volumen des gegebenen Tetraeders ist.
- Projektion eines Punktes auf eine Koordinatenebene
Analog zum ebenen Fall (siehe oben) ist die Projektion eines Punktes  von
von  aus auf die gegenüber liegende Ebene durch
aus auf die gegenüber liegende Ebene durch  (sie hat die Gleichung
(sie hat die Gleichung  )
der Punkt
)
der Punkt  .
Falls die Koordinaten von
normiert sind, teilt
die Strecke
.
Falls die Koordinaten von
normiert sind, teilt
die Strecke  im Verhältnis
im Verhältnis  .
Entsprechendes gilt für die anderen 3 Projektionen.
.
Entsprechendes gilt für die anderen 3 Projektionen.
Satz von Commandino
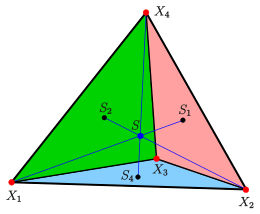 :
Schwerpunkt des Tetraeders,
:
Schwerpunkt des Tetraeders, :
Schwerpunkte der Dreiecke
:
Schwerpunkte der DreieckeProjiziert man den geometrischen Schwerpunkt  von
aus auf die gegenüberliegende Ebene mit der Gleichung ,
erhält man den Schwerpunkt
von
aus auf die gegenüberliegende Ebene mit der Gleichung ,
erhält man den Schwerpunkt  des Dreiecks
des Dreiecks  .
Entsprechendes gilt für die anderen Projektionen von .
Also gilt (siehe den vorigen Abschnitt):
.
Entsprechendes gilt für die anderen Projektionen von .
Also gilt (siehe den vorigen Abschnitt):
- Die Gerade durch die Ecke
und den geometrischen Schwerpunkt
des Tetraeders schneidet die gegenüberliegende Dreiecksebene im Schwerpunkt
des Dreiecks. Dabei teilt
die Strecke
 im Verhältnis
im Verhältnis  .
.
Dies ist der Satz von Commandino.
Hyperboloid durch die Punkte eines Tetraeders
Ein einschaliges Hyperboloid ist eine Quadrik, die 2 Scharen von Geraden enthält. In geeigneten homogenen Koordinaten kann man es durch die Gleichung
- (H)

beschreiben (siehe einschaliges Hyperboloid). Das Hyperboloid enthält die Punkte


Man rechnet leicht nach, dass
- (PH)

eine Parameterdarstellung des Hyperboloids ist. Dabei gilt:
 und
und
Die Parameterlinien ( =
const oder
=
const oder  =
const) sind Geraden. Da die Summe der baryzentrischen Koordinaten stets
=
const) sind Geraden. Da die Summe der baryzentrischen Koordinaten stets  ist, werden allerdings die Punkte des Hyperboloids in der Ebene
ist, werden allerdings die Punkte des Hyperboloids in der Ebene  nicht erfasst. Dies ist bei Einführung baryzentrischer Koordinaten kein
Nachteil.
nicht erfasst. Dies ist bei Einführung baryzentrischer Koordinaten kein
Nachteil.
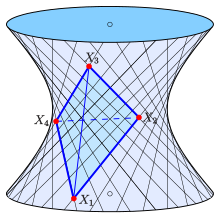
Fasst man
als baryzentrische Koordinaten auf, entsprechen die Punkte  den Ecken eines Tetraeders (in einem affinen Raum) auf einem Hyperboloid
den Ecken eines Tetraeders (in einem affinen Raum) auf einem Hyperboloid  ,
das die Geraden
,
das die Geraden  enthält (siehe Bild). Die beiden Geraden
enthält (siehe Bild). Die beiden Geraden  liegen nicht auf dem Hyperboloid ! Rechnet man die normierten
baryzentrischen Koordinaten in affine Koordinaten um (siehe (S) im
Abschnitt Definition), erhält man die affine Parameterdarstellung
des Hyperboloids:
liegen nicht auf dem Hyperboloid ! Rechnet man die normierten
baryzentrischen Koordinaten in affine Koordinaten um (siehe (S) im
Abschnitt Definition), erhält man die affine Parameterdarstellung
des Hyperboloids:
- (APH)

Dies ist die Darstellung des Hyperboloids als bilineare
Interpolationsfläche des räumlichen Vierecks .
- Eigenschaften
Das Hyperboloid hat mit der Fernebene
die beiden sich im Punkt  schneidenden Geraden
schneidenden Geraden


gemeinsam und ist deshalb affin ein
- hyperbolisches Paraboloid. (Das obige Bild ist also projektiv zu verstehen.)
- Die Fernebene ist die Tangentialebene im Punkt
 .
. - Der Schwerpunkt
 des Tetraeders liegt auf dem Hyperboloid.
des Tetraeders liegt auf dem Hyperboloid.
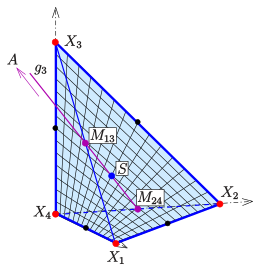
Die Gerade  geht durch die Mittelpunkte
geht durch die Mittelpunkte  der Tetraederkanten
der Tetraederkanten  bzw.
bzw.  und durch den Fernpunkt .
Dies bedeutet affin:
und durch den Fernpunkt .
Dies bedeutet affin:
- Die Achsen der Parabeln auf dem hyperbolischen Paraboloid sind alle
parallel zur Gerade
 durch die Mittelpunkte
durch die Mittelpunkte  (siehe hyperbolisches
Paraboloid). Der Schwerpunkt
ist der Mittelpunkt der Punkte
(siehe hyperbolisches
Paraboloid). Der Schwerpunkt
ist der Mittelpunkt der Punkte  .
.
- Beispiel
Das Bild zeigt das Beispiel mit


Die Parameterdarstellung ist dann

Verallgemeinerte baryzentrische Koordinaten
Baryzentrische Koordinaten  ,
die mit Bezug auf ein Polytop
statt mit Bezug auf ein Simplex definiert sind, werden verallgemeinerte
baryzentrische Koordinaten genannt. Hierbei wird weiterhin verlangt, dass
die Gleichung
,
die mit Bezug auf ein Polytop
statt mit Bezug auf ein Simplex definiert sind, werden verallgemeinerte
baryzentrische Koordinaten genannt. Hierbei wird weiterhin verlangt, dass
die Gleichung

erfüllt wird, wobei
hier die Eckpunkte des gegebenen Polytops sind. Die Definition ist also formal
unverändert, allerdings muss ein Simplex mit
Eckpunkten in einem Vektorraum mit einer Dimension von mindestens
enthalten sein, während Polytope auch in Vektorräume von niedrigerer Dimension
eingebettet sein können. Das einfachste Beispiel ist ein Viereck in der Ebene.
Als Konsequenz sind sogar die normierten verallgemeinerten baryzentrischen
Koordinaten für ein Polytop im Allgemeinen nicht eindeutig bestimmt, obwohl dies
für normierte baryzentrische Koordinaten mit Bezug auf ein Simplex der Fall ist.
Verallgemeinerte baryzentrische Koordinaten werden insbesondere in der Computergrafik und bei der geometrischen Modellierung verwendet. Dort können dreidimensionale Objekte oft durch Polyeder approximiert werden, sodass die verallgemeinerten baryzentrischen Koordinaten eine geometrische Bedeutung haben und die weitere Bearbeitung dieser Objekte erleichtern.
Baryzentrische Interpolation
Auf baryzentrischen Koordinaten basiert ein Interpolationsverfahren, das die lineare Interpolation für Funktionen mehrerer Variablen verallgemeinert.
Im Falle einer Funktion  von zwei Variablen
und
von zwei Variablen
und  sind für drei Punkte
sind für drei Punkte  ,
,
 und
und  die Funktionswerte gegeben. Dabei dürfen ,
die Funktionswerte gegeben. Dabei dürfen ,
 und
und  nicht auf einer Geraden liegen. Sie müssen also ein Dreieck
nicht auf einer Geraden liegen. Sie müssen also ein Dreieck  aufspannen. Ist nun ein beliebiger Punkt
gegeben, so definiert man
aufspannen. Ist nun ein beliebiger Punkt
gegeben, so definiert man
 ,
,
wobei  die normierten baryzentrischen Koordinaten von
sind. Diese Interpolation funktioniert auch für Punkte außerhalb des Dreiecks.
die normierten baryzentrischen Koordinaten von
sind. Diese Interpolation funktioniert auch für Punkte außerhalb des Dreiecks.
Literatur
- Oswin Aichholzer, Bert Jüttler: Einführung in die angewandte Geometrie. Springer-Verlag, Basel 2013, doi:10.1007/978-3-0346-0651-6, ISBN 978-3-0346-0651-6.
- Gerald Farin, Diane Hansford: Lineare Algebra: Ein geometrischer Zugang. Springer-Verlag, 2013, doi:10.1007/978-3-642-55841-2, ISBN 978-3-540-41854-2 .
- John Fauvel, Raymond Flood, Robin Wilson: Möbius und sein Band: Der Aufstieg von Mathematik und Astronomie im Deutschland des 19. Jahrhunderts. Springer-Verlag, 2013, ISBN 978-3-0348-6203-5.
- Peter Knabner, Lutz Angermann: Numerik partieller Differentialgleichungen. Eine anwendungsorientierte Einführung. Springer 2000, ISBN 3-642-57181-6.
- August Ferdinand Möbius: Der baryzentrische Calcul, Verlag von Johann Ambrosius BartH, Leipzig, 1827.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 25.01. 2022