Regelkreis
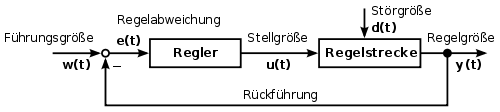
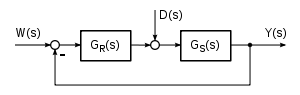
Als Regelkreis wird der in sich geschlossene Wirkungsablauf für die Beeinflussung einer physikalischen Größe in einem technischen Prozess bezeichnet. Wesentlich hierbei ist die Rückführung des aktuellen Wertes an den Regler, der einer Abweichung vom Sollwert kontinuierlich entgegenwirkt (negative Rückkopplung). Zur Beschreibung wird der Regelkreis in einzelne Übertragungsglieder zerlegt (siehe nebenstehendes Blockschaltbild).
Die mit dem Regelkreis geregelte Ausgangsgröße verhält sich robust gegenüber angreifenden Störgrößen an der Regelstrecke. Es ist Aufgabe des Reglers, das Zeitverhalten der Regelgröße bezüglich des statischen und dynamischen Verhaltens gemäß vorgegebener Anforderungen festzulegen. Zur Erfüllung widersprechender Anforderungen wie gutes Führungs- und Störverhalten sind gegebenenfalls aufwändigere Regelkreisstrukturen erforderlich.
Ein stabiler Regelkreis kann bei Parameteränderungen instabil werden, selbst wenn die einzelnen Bestandteile des Regelkreises für sich genommen stabil sind. Andererseits kann sich ein Regelkreis auch stabil verhalten, wenn einzelne Bestandteile instabil sind.
Für die anspruchsvolle Auslegung eines Reglers ist das mathematische Modell der Regelstrecke erforderlich (siehe auch Systemtheorie und Mathematische Modelle). Bei Mehrgrößensystemen (MIMO) eignet sich die Reglerauslegung mit der Zustandsraumdarstellung, bei nichtlinearen und totzeitbehafteten Eingrößensystemen (SISO) empfiehlt sich die numerische Berechnung. Die klassischen grafischen Regler-Entwurfsmethoden (Bode-Diagramm, Ortskurve des Frequenzgangs, Wurzelortsverfahren) haben lediglich didaktisch informative Bedeutung.
Durch moderne Elektronik gelingt die Realisierung beliebig komplexer Reglerstrukturen mit vertretbarem wirtschaftlichem Aufwand. Vielfach werden anstelle analoger Regler digitale Regler verwendet und eventuell mit digitalen Mess- und Stellgliedern kombiniert. Die Digitalsignale sind Wert- und zeitdiskrete Signale. Diese Regelkreise verhalten sich wie analoge Regelkreise, wenn die Auflösung und Abtastrate hoch genug ist.
Regelkreise gibt es auch außerhalb der Technik. siehe letztes Kapitel.
Einführung
Zum Verständnis der nachfolgenden mathematischen Behandlung von Regelkreisgliedern und theoretischen Modellen werden die Grundlagenkenntnisse der Differentialgleichung und die Anwendung der Laplace-Transformation vorausgesetzt.
Ein realer Regelkreis besteht aus mehreren Einzelkomponenten der Regelstrecke
und des Reglers, die jeweils ein bestimmtes Zeitverhalten haben. Während die
Regelstrecke meist als ein technisches System vorliegt, ist zur mathematischen
Behandlung des geschlossenen Regelkreises eine Systemanalyse
der Regelstrecke erforderlich, aus der sich ein mathematisches Modell bestimmen
lässt. Das Modell sollte weitgehend dem Zeitverhalten der realen Regelstrecke
entsprechen. Die Beobachtung eines Signalverlaufs an einem Übertragungssystem
für ein gegebenes Eingangssignal  beginnt bei
beginnt bei  und endet für den Verlauf des Ausgangssignals
und endet für den Verlauf des Ausgangssignals  mit
mit  .
.
In Verbindung mit dem Regelstreckenmodell  kann ein Regler
kann ein Regler  parametriert werden, der für den geschlossenen Regelkreis nach der
Schließbedingung
parametriert werden, der für den geschlossenen Regelkreis nach der
Schließbedingung  die Stabilität sichert.
die Stabilität sichert.
Allgemein können die Parameter des Reglers bei komplizierteren Regelstrecken nicht optimal von Hand eingestellt werden. Industrielle Regelprozesse mit Fehlanpassungen des Reglers können infolge aufschaukelnder Amplituden der Regelgröße Zerstörungen der Anlagen herbeiführen.
Wegen geforderter Gütekriterien (Regelgüte) des Einschwingvorgangs der Regelgröße ist die heuristische Methode „Versuch und Irrtum“ in der offline-Simulation des Regelkreises meist üblich.
Die häufigsten mathematischen Systembeschreibungen sind die Differentialgleichung
 ,
die Übertragungsfunktion
,
die Übertragungsfunktion
 ,
der Frequenzgang
,
der Frequenzgang  und die zeitdiskrete
Differenzengleichung
und die zeitdiskrete
Differenzengleichung
 .
Enthalten die Systeme eine Totzeit
(Transportzeit, Getriebespiele), Begrenzungseffekte einiger Komponenten oder
andere Nichtlinearitäten kommt für die Systemberechnung praktisch nur die
zeitdiskrete Behandlung mit Differenzengleichungen in Verbindung mit logischen
Funktionen als Systembeschreibung infrage. Differenzengleichungen können aus
gewöhnlichen Differentialgleichungen abgeleitet werden, in dem die
Differentialquotienten durch Differenzenquotienten
.
Enthalten die Systeme eine Totzeit
(Transportzeit, Getriebespiele), Begrenzungseffekte einiger Komponenten oder
andere Nichtlinearitäten kommt für die Systemberechnung praktisch nur die
zeitdiskrete Behandlung mit Differenzengleichungen in Verbindung mit logischen
Funktionen als Systembeschreibung infrage. Differenzengleichungen können aus
gewöhnlichen Differentialgleichungen abgeleitet werden, in dem die
Differentialquotienten durch Differenzenquotienten  ersetzt werden.
ersetzt werden.
Grundlagen Regelkreismodell
Dynamische Systeme mit konzentrierten Parametern als Eingrößen- und Mehrgrößensysteme können sich linear, nichtlinear, zeitinvariant, zeitvariant und global-proportional, -integral und -differenzial verhalten. Systeme mit konzentrierten Parametern (Feder-Masse-System) haben im Gegensatz zu Systemen mit verteilten Parametern (Wärmefluss im homogenen Medium) keine räumliche Ausdehnung.
Die Aufgabe eines mathematischen Modells eines realen dynamischen Prozesses oder eines noch zu projektierenden technischen Prozesses dient dem Erkennen und der Vorhersage des Systemverhaltens.
Das mathematische Modell eines Regelkreises beschreibt alle äußeren Einflussgrößen wie Störgrößen und Eingangssignale auf den geschlossenen Wirkungsablauf des Regelkreises. Das Verhalten der Ausgangsgrößen wie die Regelgrößen sowie auch interessante Zwischengrößen (Stellgrößen) als Funktion der Eingangssignale und der Parameter von Regler und Regelstrecke sind von besonderem Interesse.
Je nach Lastenheft der regelungstechnischen Aufgabenstellung ist für die Bestimmung eines geeigneten Reglers das mathematische Modell der Regelstrecke erforderlich.
Mathematische Modelle können bei einfachen linearen physikalischen Systemen durch eine gewöhnliche Differenzialgleichung exakt eine Regelstrecke beschreiben (= Theoretische Modellbildung).
In den meisten Anwendungsfällen haben Übertragungssysteme (Regelstrecken) auch nichtlineare Komponenten und sind totzeitbehaftet. Für solche Systeme wird experimentell durch geeignete Testsignale die Systemantwort aufgezeichnet und ein mathematisches Modell gesucht, das den gemessenen Verlauf der Ausgangsgröße y(t) reproduziert (= Experimentelle Prozessanalyse). Ein derartig definiertes Modell ist durch Anwendung numerischer Verfahren einfach berechenbar. Sind nichtlineare Teilsysteme im Gesamtsystem enthalten, müssen diese getrennt erfasst und durch Wertetabellen definiert werden.
Global-proportionale Regelstrecken höherer Ordnung mit Totzeit lassen sich relativ genau durch PT2-Tt-Glieder beschreiben. Global-integrale Regelstrecken lassen sich ebenso durch PT2-Tt-I-Glieder beschreiben.
Zum Modellverständnis eines dynamischen Systems müssen die wichtigsten Begriffe der inneren Systemspeicher verstanden werden.
Details siehe Artikel Systemtheorie (Ingenieurwissenschaften)!
Der einschleifige Regelkreis
Das Analysieren von Funktionen verlangt, die Regelkreisteile einzeln zu betrachten. So beschreibt der Begriff offener Regelkreis (Offene Schleife) das Verhalten von Regler und Regelstrecke ohne Rückkopplung. Der Vorgang des Schließens (also das Hinzuschalten der Rückführung) wird in einigen Fällen separat betrachtet.
Übertragungsfunktionen des Regelkreises
Das Übertragungsverhalten von linearen Regelkreissystemen (Lineares zeitinvariantes System, LZI-System) wird allgemein durch Differentialgleichungen (siehe auch Lineare gewöhnliche Differentialgleichung) beschrieben. Eine große Vereinfachung der Berechnung der Systeme ergibt sich dann, wenn die Lösung der Differentialgleichung nicht im Zeitbereich, sondern im Bildbereich (s-Bereich) mittels Laplace-Transformation vorgenommen wird. Die Systemberechnung bezieht sich dann auf einfache algebraische Operationen. Voraussetzung ist, dass es sich bei dem System um ein LZI-System handelt und die Anfangsbedingungen Null sind.
Die Übertragungsfunktion eines Übertragungssystems ist das Verhältnis der Laplace-transformierten Ausgangsgröße Y(s) zur Laplace-transformierten Eingangsgröße U(s) mit s als Laplace-Variable.
Die Übertragungsfunktion eines dynamischen linearen zeitinvarianten Systems:
 und des Regelkreises
und des Regelkreises 
ist in der Regelungstechnik die am meisten dargestellte Beschreibung für das Eingangs-Ausgangsverhalten von Regelkreisgliedern.
Die Pole und Nullstellen der Übertragungsfunktion sind die wichtigsten Kenngrößen des Systemverhaltens.
Beispiel einer Übertragungsfunktion der Polynomdarstellung und der Zerlegung in die Pol-Nullstellen-Darstellung mit reellen Linearfaktoren:

|
Mittels der Nullstellenbestimmung
können die Polynome der Übertragungsfunktion  in eine Produktform (Linearfaktoren)
im Zähler und Nenner gebracht werden. Die Produktdarstellung im Zähler und
Nenner der Übertragungsfunktion
ist mathematisch identisch mit der Polynomdarstellung.
in eine Produktform (Linearfaktoren)
im Zähler und Nenner gebracht werden. Die Produktdarstellung im Zähler und
Nenner der Übertragungsfunktion
ist mathematisch identisch mit der Polynomdarstellung.
Die Pole (Nullstellen des Nenners)  oder Nullstellen (Nullstellen des Zählers)
oder Nullstellen (Nullstellen des Zählers)  sind entweder Null, reell
oder konjugiert
komplex.
sind entweder Null, reell
oder konjugiert
komplex.
Durch die Zerlegung der Zähler- und Nennerpolynome in Pole und Nullstellen ergibt sich die faktorielle Darstellung der Übertragungsfunktion, d.h. in die 3 möglichen Grundsysteme im komplexen Frequenzbereich (s-Bereich, s-Ebene):

jeweils in Kombinationen im Zähler und Nenner der Übertragungsfunktion stehend.
(Siehe Charakterisierung der Regelstrecken)
Die Pole (Nullstellen des Nennerpolynoms) der Übertragungsfunktion sind gleichzeitig die Lösungen des Systems, was noch ausführlich gezeigt wird.
Liegt die Übertragungsfunktion einer Regelstrecke oder ein angenähertes Modell der Regelstrecke vor, kann relativ einfach ein passender Regler bestimmt werden. Dabei ist jedoch zu beachten, dass durch eine bestimmte Kreisverstärkung sich eine hohe Stellgröße u(t) ergeben kann, die die Regelstrecke nicht verarbeiten kann. Es tritt eine Begrenzung der Stellgröße ein und die Übertragungsfunktion des offenen oder geschlossenen Regelkreises ist nicht mehr gültig.
Die Signalbegrenzung ist ein Effekt von mehreren in realistischen Regelstrecken vorkommenden nichtlinearen Systemen. Dies gilt auch für Totzeitsysteme und Systeme mit nichtlinearer Kennlinie. Sie können nicht mit der Übertragungsfunktion behandelt werden. Für Totzeit-Systeme gibt es wohl eine transzendente Übertragungsfunktion:
 ,
,
die einer Übertragungsfunktion G(s) multiplikativ angehängt werden kann, sich aber nicht für die algebraische Berechnung mit der Übertragungsfunktion eignet.
Ebenso sind verschiedene klassische Methoden der Stabilitätsbetrachtung für die genannten Effekte ungültig.
Anforderungen an einen Regelkreis
- Der Regelkreis muss stabil sein.
- Die Stabilität des Regelkreises mit linearen zeitinvarianten Übertragungssystemen hängt von der Ordnung und den Parametern der Strecke, von der Struktur des Reglers und von den Parametern des Reglers ab.
- Wird eine Steuerstrecke aus linearen zeitinvarianten Systemen in Verbindung mit einem Regler zu einem Regelkreis gestaltet, dann werden in Bezug zum Verhalten der Steuerstrecke zwei Vorteile gewonnen:
-
- die Regelgröße
stellt sich auf das Niveau des Sollwertes
 ein, Störgrößen werden minimiert,
ein, Störgrößen werden minimiert, - die dominante Zeitkonstante der Regelgröße verringert sich ungefähr um den Faktor der Kreisverstärkung.
- die Regelgröße
- Bei Vorhandensein differenzierender PD-Glieder im Regler wird die
Verstärkung um einen dynamischen Anteil noch zusätzlich erhöht. Dabei kann die
Stellgröße
sehr große Werte annehmen. Dies ergibt sich aus der Berechnung der
Schließbedingung (Signalflussalgebra)
des Regelkreises.

- Eine zu einer Regelstrecke umfunktionierte Steuerstrecke lässt sich ohne
Energiezufuhr nicht schneller machen. Dieses Beispiel zeigt den Effekt der
gerätetechnischen Signalbegrenzung der Stellgröße ,
die häufig als Schnittstelle von Steuersignalen und Steuerenergie fungiert
(z.B. Stellantriebe, Ventile usw.). Es ist Ermessenssache, ob die
Leistungsschnittstelle zum Regler oder zur Regelstrecke gehört.
- Die Übertragungsfunktion
 dieses Beispiels eines einfachen Regelkreises enthält keinen Hinweis auf eine
Signalbegrenzung und ist deshalb falsch, wenn eine Signalbegrenzung vorliegt.
Übertragungsfunktionen gelten nur für lineare zeitinvariante Systeme.
dieses Beispiels eines einfachen Regelkreises enthält keinen Hinweis auf eine
Signalbegrenzung und ist deshalb falsch, wenn eine Signalbegrenzung vorliegt.
Übertragungsfunktionen gelten nur für lineare zeitinvariante Systeme. - Man kann durchaus Signalbegrenzungen ignorieren und kommt zu einem
stabilen Regelkreis. Jedoch entspricht das Übergangsverhalten der Regelgröße
bei Signalbegrenzungen nicht der Übertragungsfunktion des Regelkreises.
- Ein wichtiges Verfahren der Bestimmung der Stabilität ist die Analyse des Nennerpolynoms der Übertragungsfunktion des Regelkreises, ob die Pole (Nullstellen des Nenners, die die Gleichung zu Null machen) in der linken s-Halbebene liegen. Siehe Kapitel „Stabilität des Regelkreises“!
- Der Regelkreis soll ein gutes Führungsverhalten und Störverhalten aufweisen.
- Werden keine besonderen regelungstechnischen Maßnahmen getroffen, sind dies widersprechende Anforderungen.
- Der Regelkreis soll sich robust verhalten.
- Unter „robust“ versteht man den Einfluss der schleichenden Änderungen der Parameter von Regler und Regelstrecke auf die Dynamik des Regelkreises. Diese durch innere und äußere Umwelteinflüsse wie z.B. Alterung, Reibung, Korrosion entstehenden Parameteränderungen müssen innerhalb eines zugelassenen Toleranzbereiches liegen. Das Verhalten der Robustheit wird auch mit Einfluss der „inneren Störgrößen“ eines Regelkreises bezeichnet.
Diese dargestellten Anforderungen sind nur durch einen Kompromiss der Reglerparameter zu erfüllen. Bei hohen Anforderungen z.B. an das Führungsverhalten und/oder Störverhalten sind aufwändigere Reglerstrukturen erforderlich.
Führungsverhalten eines Regelkreises
Der Regelkreis soll ein gutes Führungsverhalten haben, d.h. nach Vorgabe einer Führungsgröße W(s) bzw. Führungsgrößenänderung (Sollwertänderung) wird ein bestimmtes dynamisches Verhalten erwünscht, mit dem die Regelgröße sich dem Sollwert der Führungsgröße annähert. Neben dem dynamischen Verhalten interessiert die stationäre Genauigkeit. Typisches Eingangs-Testsignal ist der Einheitssprung. (Siehe Tabelle Testsignale)
Unter dem Begriff Sollwert versteht man einen bestimmten Wert der Führungsgröße. Ist die Führungsgröße eine zeitabhängige Größe, muss der Regelkreis bzw. die Regelgröße ein gutes Folgeverhalten zeigen. Typisches Eingangstestsignal ist die Anstiegsfunktion.
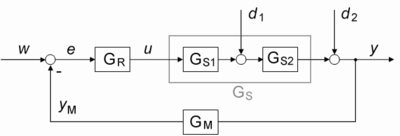
Standardmäßig setzt sich der Regelkreis G(s) aus den Übertragungsfunktionen des Reglers GR(s) und der Strecke GS(s) zusammen. Hat die messtechnische Erfassung der Regelgröße ein Zeitverhalten, das berücksichtigt werden muss, dann erhält der Zweig der Rückführung der Regelgröße die messtechnische Einrichtung mit der Übertragungsfunktion GM(s).
- Die Führungs-Übertragungsfunktion des Regelkreises lautet gemäß der Schließbedingung mit negativer Kopplung (Gegenkopplung):

- Ist das Zeitverhalten von GM(s) vernachlässigbar, dann lautet die Übertragungsfunktion:

- oder in der Zusammenfassung von GR(s) · GS(s) = GO(s) als offener Regelkreis:

Störverhalten eines Regelkreises
Der Regelkreis soll ein gutes Störverhalten zeigen. Der Einfluss der Störgröße soll gering sein. Der Angriffsort der Störgrößen ist häufig die Regelgröße. Der Angriffsort kann aber auch innerhalb der Regelstrecke oder am Eingang der Regelstrecke liegen. Für die Beschreibung des Störverhaltens f(t) müssen der Angriffspunkt und der Störsignalverlauf der Störgröße bekannt sein. Der ungünstigste Fall des Störsignals d(t) liegt vor, wenn es sprungartig additiv auf den eingeschwungenen Zustand der Regelgröße y(t) wirkt. Die Polarität der Störung kann positiv oder negativ sein. Je nach der Dynamik des Regelkreises wird die Störabweichung mehr oder weniger schnell ausgeregelt. Besitzt der offene Regelkreis ein I-Glied, wird eine konstante Störgröße im stationären Zustand vollständig ausgeregelt.
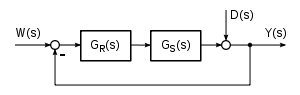
- Die Störgröße D(s) wirkt auf den Ausgang der Regelstrecke Y(s)
- Eingangsgröße = Störgröße D(s)
Ausgangsgröße = Regelgröße Y(s). - Stör-Übertragungsfunktion GD(s) für die auf den Ausgang der Regelstrecke Y(s) wirkende Störung:


- Die Störgröße D(s) wirkt auf den Eingang U(s) der Regelstrecke
- Eingangsgröße = Störgröße D(s)
Ausgangsgröße = Regelgröße Y(s). - Stör-Übertragungsfunktion für die auf den Eingang der Regelstrecke wirkende Störung:

- Der entscheidende Unterschied einer Störübertragungsfunktion mit Angriff der Störgröße auf den Streckeneingang anstelle des Streckenausgangs ist die Tatsache, dass das Störsignal bei Angriff auf den Streckeneingang die Regelstrecke mit Ihren Verzögerungskomponenten durchlaufen muss und entsprechend gedämpft wird. Bei Angriff des Störsignals auf den Ausgang der Regelstrecke wirkt das Störsignal im ersten Augenblick ungedämpft auf die Regelgröße, bis entsprechend der Dynamik des Regelkreises der Störeinfluss reduziert wird.
- Regelkreise, bei denen die Störgröße am Eingang oder innerhalb der Regelstrecke wirkt, erfordern eine andere optimale (höhere) Kreisverstärkung für das Störverhalten als für das Führungsverhalten. Eine höhere Kreisverstärkung – als für das optimale Führungsverhalten notwendig – führt zu einer Erhöhung der Schwingneigung der Regelgröße y(t) für zeitlich schnelle Führungs-Eingangsgrößen.
- Ist das Führungsverhalten bei Führungsgrößen-Änderungen nicht so wichtig, kann mittels einer Anstiegsbegrenzung des Sollwertes der Führungsgröße das Überschwingen der Regelgröße y(t) begrenzt werden.
- Ist ein optimales Führungs- und Störverhalten gefordert, müssen spezielle Reglerstrukturen eingesetzt werden.
- Einschränkung des Superpositionsprinzips bei Einwirken einer Störgröße innerhalb des Regelkreises.
- Greift eine Störgröße z.B. am Eingang der Regelstrecke an, gilt das Superpositionsprinzip nur innerhalb des Reglers oder innerhalb der Regelstrecke.
- Auswirkung:
- Verschiebt man eine Komponente des Reglers über den Eingriffsort der Störgröße hinaus, dann ändert sich die Störübertragungsfunktion. Damit ändert sich die Störunterdrückung.
- Wenn man bei einer Pole-Nullstellenkompensation eine Komponente des Reglers mit einer Komponente der Strecke, die hinter dem Eingriffspunkt der Störgröße liegt, gegeneinander kürzt (z.B. PD-Glied gegen PT1-Glied), dann ergibt sich ein völlig anderes Verhalten der Regelgröße gegenüber dem ungekürzten Zustand.
- In der Praxis an einer Hardware-Regelstrecke ist dieses Verhalten ohne Bedeutung, weil man ohne Kunstgriffe kaum eine Komponente des Reglers in die Regelstrecke verschieben kann. Für die Simulation eines Regelkreises mit einer Störgröße innerhalb der Regelstrecke muss die dargestellte Einschränkung des Superpositionsprinzips beachtet werden.
Begriffe zur Beschreibung der Dynamik
- Regelkreis-Gesamtverstärkung (auch Kreisverstärkung, P-Verstärkung)
- Unter der Kreisverstärkung K des offenen Regelkreises wird das Produkt aller Faktoren der einzelnen Übertragungssysteme verstanden. Bei Reglern mit einem I-Glied in der Paralleldarstellung z.B. beim PID-Regler beträgt die Gesamtverstärkung des Regelkreises K = KPID · 1 / Tn.
- Soweit möglich, werden Verzögerungsglieder der Regelstrecke durch PD-Glieder des Reglers kompensiert.
- Um den offenen Regelkreis schließen zu können, muss erst die Gesamtverstärkung des offenen Regelkreises ermittelt werden, die den Verlauf der Regelgröße bei Sollwert-Änderungen oder Angriff einer Störgröße entscheidend beeinflusst. Für die Ermittlung der Gesamtverstärkung des offenen Regelkreises gibt es eine Reihe von Stabilitätsverfahren, die je nach Verhalten der Regelstrecke mit mehr oder weniger Einschränkungen verbunden sind:
- Einschwingen (auch Übergangsverhalten, Transientes Verhalten)
- Das Einschwingen (Überschwingen) eines Ausgangssignals eines Übertragungssystems als Folge einer Eingangssignaländerung ist ein dynamischer Vorgang f(t), bei dem die Ausgangsgröße des Systems im Falle eines stabilen Systemverhaltens sich bis zu einem stationären Zustand bewegt.
- Unter Einschwingzeit wird hier das Zeitintervall zwischen Start der Eingangssignal-Änderung und der abgeschlossenen dynamischen Änderung des Ausgangssignals verstanden, dem Beginn des stationären Zustandes des Ausgangssignals. Meist wird das Abklingen der Signaländerung mit einem Toleranzwert von kleiner ca. 10 % bis 5 % als abgeschlossen definiert.
- Unter der Überschwingzeit versteht man den Zeitraum des dynamischen Vorgangs vom Erreichen des Sollwertes bis zum Abklingen. Die Werte des Erreichens und des Abklingens der Schwingung werden häufig einem Toleranzbereich von ±10 % bis ±5 % zugeordnet.
- Sollwertfolge
- Die Regelgröße folgt dem Sollwert (Festwertregelung). Die Regelgröße stellt sich nach der Einschwingzeit auf das Niveau des Sollwertes ein.
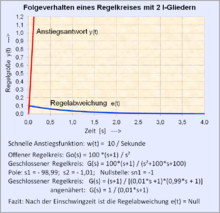
- Ist ein I-Anteil im Regelkreis vorhanden, wird die Regeldifferenz e(t) bei einer konstanten Störgröße nach der Einschwingzeit zu Null.
- Folgeverhalten
- Mit Folgeregelung bezeichnet man das Regelverhalten, wenn die Führungsgröße w(t) als eine zeitliche Folge gesteuert wird. Unter einem guten Folgeverhalten versteht man eine geringe Differenz zwischen der Regelgröße und der Führungsgröße nach dem Einschwingvorgang.
- Handelt es sich bei w(t) um ein kontinuierliches Zeitverhalten (konstante Geschwindigkeit), ergibt sich bei einem Regelkreis ohne oder mit einem I-Anteil ein Folgefehler.
- Für einen Regelkreis mit 2 I-Gliedern mit konstanter Anstiegsgeschwindigkeit der Führungsgröße w(t) folgt die Regelgröße y(t) nach dem Einschwingen der Führungsgröße ohne Regeldifferenz.
- Trajektorienfolge:
- (Trajektorie in der Mathematik: Bahnkurve, z.B. Signalverlauf f(t) als Lösung einer Differentialgleichung)
- Die Trajektorienfolge ist ein Begriff der Folgeregelung, bei der die Führungsgröße w(t) als Funktion der Zeit gesteuert wird. Die Trajektorienfolge ist also eine zeitgesteuerte oder zeitabhängige Führungsgröße w(t).
- In der Zustandsraum-Darstellung findet der Begriff Trajektorienfolge häufig Anwendung.
- Trajektorenfolge mit Anpassung an das dynamische System:
- Inneres Modell-Prinzip: Ein Regelkreis kann den Folgefehler einer Führungsgröße vollständig unterdrücken, wenn er ein „inneres Modell“ des Führungssignals enthält. Das bedeutet, dass der offene Regelkreis mit dem Regler und der Regelstrecke das Führungsgrößenmodell beinhalten muss, für das die Sollwertfolge erreicht werden soll.
- Störsignal beliebiger Form mit Anpassung an das dynamische System
- Inneres Modell-Prinzip: Das Modell der Störung wird in den Regler integriert.
- Ein Regelkreis kann ein Störsignal vollständig unterdrücken, wenn er ein „inneres Modell“ des Störsignals enthält.
- Großsignalverhalten
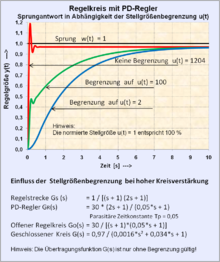
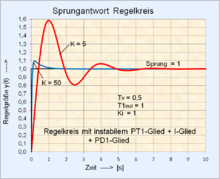
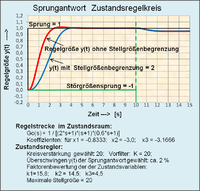
- Unter Großsignalverhalten wird hier verstanden, dass ein Regler für einen Regelkreis für eine maximale Führungsgröße ausgelegt wird. Ein Einheits-Eingangssprung = 1 bedeutet in diesem Fall ein 100 %-Signal. Erlaubt eine PT2-Strecke den Einsatz eines P-Reglers (abhängig von den Zeitkonstanten) mit z.B. einer P-Verstärkung von K = 50, dann ist die Ausgangsgröße des Reglers anfangs 50 und nach der Einschwingzeit statisch bei 0,98. Lässt die Regelstrecke eine Eingangsgröße u(t) von 50 = 5000 % nicht zu, sondern begrenzt diesen Wert, dann wird die Sprungantwort der Regelgröße y(t) im Einschwingvorgang verzerrt und verzögert abgebildet. Der Effekt der Zunahme der Stellgröße wird noch verstärkt, wenn der Regler ein PD-Glied enthält.
- Bei Reglern mit PI- und PID-Verhalten zeigt sich dieser Effekt nicht so stark, weil durch das I-Verhalten eine große Kreisverstärkung durch die zusätzliche Phasendrehung des Systems nicht möglich ist. Beim PI-Regler wird der Signalanstieg des PD-Gliedes durch das I-Glied vollständig kompensiert. Beim PID-Regler trägt ein PD-Glied zum Signalanstieg bei.
- Fazit: Die Übertragungsfunktion eines Übertragungssystems oder eines Regelkreises bestimmt nur dann das dynamische Verhalten der Ausgangsgröße, wenn keine Signalbegrenzungen innerhalb der Systemkette vorliegen. Die Übertragungsfunktion ist bei Signalbegrenzungen ungültig!
- Gütekriterien (Regelgüte, Integralkriterien, Güte des Regelverhaltens)
- Man versteht darunter ein Maß für die zeitliche Abweichung der Sprungantwort der Regeldifferenz y(t) zur Sprungfunktion der Führungsgröße w(t) über den vollen Einschwingvorgang durch Integration.
- Bei diesen Integralkriterien wird die Regeldifferenz w(t) –
y(t) für die Dauer des Einschwingvorgangs auf verschiedene Arten
integriert. Unterschieden wird die:
-
- Lineare Regelfläche
- Quadratische Regelfläche
- Betragsregelfläche: (Integration des Betrages der Regeldifferenz)
- ITAE-Kriterium: Durch Multiplikation mit der Zeit werden die kleinen Schwingamplituden stärker berücksichtigt.
-
- Diese seit Anfang des 20. Jahrhunderts bekannten Gütekriterien beziehen
sich auf die Sprungantwort eines Regelkreises und schließen folgende
Beurteilungskriterien ein:
-
- Anstiegszeit
 (auch
(auch  ,
engl. rise time): Die Anstiegszeit wird durch die Projektion der
Wendetangente auf die Zeitachse ermittelt. Sie entspricht dem Zeitraum
zwischen den Schnittpunkten
,
engl. rise time): Die Anstiegszeit wird durch die Projektion der
Wendetangente auf die Zeitachse ermittelt. Sie entspricht dem Zeitraum
zwischen den Schnittpunkten  auf der Zeitachse und
auf der Zeitachse und  der Höhe des stationären Wertes.[1]
der Höhe des stationären Wertes.[1] - Verzugszeit
 (engl. delay time, auch dead time): Zeit vom Eingangssprung nach dem
Schnittpunkt der Wendetangente auf der Zeitachse.
(engl. delay time, auch dead time): Zeit vom Eingangssprung nach dem
Schnittpunkt der Wendetangente auf der Zeitachse. - Ausregelzeit = Ts (engl. settling time): Zeit von t = 0 bis zum Erreichen eines Toleranzbandes z.B. 5 % oder 2 % der stationären Sprungantwort,
- Überschwingweite ü = normierte größte Überschwingweite bezogen auf die Sprungantwort der stationären Regelgröße,
- Stationäre Regelfehler werden für die Gütebetrachtung nicht berücksichtigt.
- Anstiegszeit
-
- Ließen sich diese Größen gemeinsam minimieren, dann wäre der Regelkreis optimal dimensioniert. Leider zeigen die genannten Größen bei Änderung der Reglerparameter ein teilweise entgegengesetztes Verhalten. Erhöht man beispielsweise die Kreisverstärkung, verkürzt sich die Anstiegszeit; die Ausregelzeit und die Überschwingweite vergrößern sich.
- Der Regelkreis wird mit Hinblick auf das Führungs-, Stör- und Robustheitsverhalten optimiert. Welche Art der oben genannten Gütekriterien berücksichtigt werden soll, muss in einem Projekt-Lastenheft festgelegt werden.
- Modell der Regelstrecke und des Regelkreises
- Unter dem Modell (Modellbildung) einer Regelstrecke oder eines Übertragungssystems versteht man das abstrakte Abbild einer meist technischen (evtl. physikalischen, chemischen, biologischen) Einrichtung. Das Modell wird analytisch über Grundgleichungen oder experimentell als mathematisches Modell gewonnen.
- Die Modellierung einer Regelstrecke im Zeitbereich geschieht experimentell in der einfachsten Form durch eine grafische Aufzeichnung der Sprungantwort mit anschließender Analyse, wenn mathematisch möglich durch Aufstellen von Differentialgleichungen oder durch Aufstellung eines Zustandsraummodells.
- (Siehe Experimentelle Systemidentifikation von Regelstrecken nach der Sprungantwort)
- Die Modellierung im Frequenzbereich ist die Darstellung des Regelstreckenmodells als Übertragungsfunktion.
- Nichtlineare Systeme können weder durch gewöhnliche Differentialgleichungen noch durch Übertragungsfunktionen beschrieben werden. Eine beschränkte Darstellung ist allenfalls im Zustandsraum (Regelstrecke im Zustandsraum, Zustandsraumdarstellung) möglich bzw. durch numerische zeitdiskretisierte Verfahren.
Stabilität des Regelkreises
Die verschiedenen klassischen grafischen Verfahren der Stabilitätsbestimmung beziehen sich meist darauf, am offenen Regelkreis – bestehend aus der Regelstrecke und dem Regler – festzustellen, ob der geschlossene Regelkreis stabil ist. Schon das Vorhandensein einer Totzeit, die häufig in den Regelstrecken vorkommt, lässt einige dieser Verfahren versagen.
Ein Verfahren der Bestimmung der Stabilität im Frequenzbereich (s-Bereich) bezieht sich auf die Lage der Pole und Nullstellen des Regelkreises in der s-Ebene. Wenn der Übertragungsfaktor, die Pole und Nullstellen des Regelkreises bekannt sind, ist das Verhalten des Regelkreises vollständig beschrieben. Dieses Verfahren eignet sich aber auch nur für lineare zeitinvariante Systeme ohne Totzeit.
Liegt eine Begrenzung der Stellgröße vor, kann lediglich festgestellt werden, ob der Regelkreis stabil ist. Dabei wird vorausgesetzt, dass die Stellgrößenbegrenzung mindestens einen ca. 2 bis 3-fachen Wert der maximalen Führungsgröße zulässt.
Eine weitere Methode die Auswahl und Parametrierung eines Reglers vorzunehmen, ist die Simulation eines Regelkreises – also eines Modells aus Regler und Regelstrecke – durch numerische Behandlung zeitdiskretisierter Übertragungssysteme.
In Verbindung mit logischen Operatoren und Tabellen können auch gemischte LZI- und nichtlineare zeitunabhängige Systeme berechnet werden.
Es gibt verschiedene Definitionen und Begriffe der Stabilität:
Interne Stabilität
Wenn die Übertragungsfunktion eines Übertragungssystems oder eines Regelkreises vorliegt:
Die Pole einer Übertragungsfunktion bestimmen die Stabilität und die Geschwindigkeit der Systembewegung. Die Nullstellen einer Übertragungsfunktion haben nur Einfluss auf die Amplituden des Systems.
| Ein Übertragungssystem ist intern stabil, wenn alle (Teil-)Übertragungsfunktionen nur Pole in der linken s-Halbebene haben. |
|---|
Externe Stabilität (BIBO-Stabilität)

Wenn die Hardware eines Übertragungssystems bzw. eines Regelkreises oder eines genauen Modells mit dem Eingangs- und Ausgangssignal vorliegt:
| Ein Übertragungssystem gilt als extern stabil, wenn jedes beliebige
beschränkte Eingangssignal an dem System auch ein beschränktes
Ausgangssignal hervorruft. |
Stabilität in Abhängigkeit von den Kenngrößen der Regeleinrichtung
Dazu gibt es eine Vielzahl von mathematischen und grafischen Verfahren.
|
Bedeutung der Pole und Nullstellen der Übertragungsfunktion eines Übertragungssystems
Das Übertragungsverhalten eines Übertragungssystems im Frequenzbereich wie auch im Zeitbereich wird von den Koeffizienten und dem Grad der Übertragungsfunktion bestimmt. Die Produktdarstellung einer Übertragungsfunktion in nicht mehr aufspaltbare Grundsysteme G(s) erfordert die Bestimmung der Pole und Nullstellen des Zählerpolynoms (Polynom) und des Nennerpolynoms der Übertragungsfunktion.
Die Pole des Nennerpolynoms sind gleichzeitig die Lösung des Systems. Die Pole bestimmen unter anderem die Stabilität des Systems. Wegen der Wichtigkeit der Begriffe Pole und Nullstellen ist deren Verhalten in den folgenden Kapiteln dargestellt.
Die allgemeine Darstellung einer Übertragungsfunktion als eine rational gebrochene Funktion eines Übertragungssystems mit dem Ausgangssignal Y(s) und dem Eingangssignal U(s) lautet:

Mittels der Übertragungsfunktion wird das Verhalten des Systems aus den Eingangs- und Ausgangssignalen beschrieben.
Das Übertragungsverhalten eines Übertragungssystems wird bestimmt von:
- der Struktur der Übertragungsfunktion, d.h. Grad des Zähler- und des Nennerpolynoms,
- den Koeffizienten der Polynome
Die Polynomdarstellung – im Gegensatz zur Produktdarstellung – der Übertragungsfunktion eines Übertragungssystems ergibt sich:
- durch die Laplace-Transformation einer gewöhnlichen Differentialgleichung, die das Übertragungssystem beschreibt, oder
- wenn die Übertragungsfunktion eines offenen Regelkreises Go(s) in Produktdarstellung der Schließbedingung unterzogen wird mit

Den Nenner der Übertragungsfunktion 
bezeichnet man als „charakteristische Gleichung“ oder auch als „charakteristisches Polynom“. Das charakteristische Polynom ist identisch mit dem Nennerpolynom des Regelkreises.
Die Kenntnis der Nullstellen eines Polynoms ist sehr wichtig für die Überführung des Polynoms in die Produktdarstellung und für die Beurteilung der Stabilität eines Übertragungssystems wie folgt:
- Definition Nullstellen und Pole
- Bei der Darstellung der Übertragungsfunktion als eine rational gebrochene
Funktion werden die Nullstellen des Zählerpolynoms, die die
Übertragungsfunktion zu Null machen, als Nullstellen
bezeichnet. Die Nullstellen des Nennerpolynoms bezeichnet man als Pole .
Nach Übergang des offenen zum geschlossenen Kreis werden die Pole auch als
Wurzeln
 bezeichnet.
bezeichnet.
- Die Bestimmung der Nullstellen und Pole der Polynome einer Übertragungsfunktion erlaubt die Produktdarstellung.

- Mit der Kenntnis der Pole der charakteristischen Gleichung ergibt sich die Lösung des Übertragungssystems im Zeitbereich. Die Übertragungsfunktion in Produktdarstellung führt bei einem gegebenen Eingangssignal über die Laplace-Transformation direkt zu einer Lösung im Zeitbereich.
- Berechnungsbeispiel:
- Die Normalform der Produktdarstellung wird so umgeformt, dass der Faktor vor der Laplace-Variable s verschwindet: (Umwandlung Zeitkonstanten-Darstellung in Pole-Nullstellen-Darstellung)

- Pole:

- Die Ausgangsgröße eines dynamischen Systems y(t) des Zeitbereichs für ein Übertragungssystem im s-Bereich lautet:

- Laplace-Rücktransformation mit Hilfe von Laplace-Transformationstabellen:
 (= Impulsantwort wegen
(= Impulsantwort wegen  )
)
- Die Pole einer Übertragungsfunktion – im Gegensatz zu den Nullstellen – treten im Zeitbereich nur im Exponenten der e-Funktionen auf.
- Die Nullstellen einer Übertragungsfunktion beeinflussen nicht die Stabilität des Systems und nicht die Geschwindigkeit der Systembewegung. Sie haben aber einen erheblichen Einfluss auf die Amplitude der Systemantwort.
- Für den geschlossenen Regelkreis muss die Übertragungsfunktion aus Stabilitätsgründen immer einen Pol mehr aufweisen, als Nullstellen vorhanden sind.
- Für die Bestimmung der Pole und Nullstellen von Übertragungsfunktionen kann man sich fertiger Rechenprogramme für Übertragungsfunktionen bis 4. Ordnung bedienen. Derartige Programme findet man auch im Internet unter dem Suchbegriff „Nullstellen von Polynomen“.
Bedeutung der Pole und Nullstellen für die Stabilität des Regelkreises
- Nur negative Pole eines Übertragungssystems bedeuten, dass das System
stabil ist. 1 Pol im Ursprung (
 )
bedeutet Grenzstabilität. 2 Pole im Ursprung (
)
bedeutet Grenzstabilität. 2 Pole im Ursprung ( )
bedeutet Instabilität.
)
bedeutet Instabilität. - Liegt ein negativer Pol einer Übertragungsfunktion nahe am Ursprung (Imaginäre Achse) und weit von den Nullstellen entfernt, so ist sein Einfluss groß. Ein kleiner Wert des Betrages des Pols bedeutet eine große Zeitkonstante.
- Liegt ein negativer Pol einer Übertragungsfunktion in der Nähe oder direkt auf einer negativen Nullstelle, so heben sie sich in ihrer Wirkung weitgehend auf. (Pol-Nullstellenkompensation).
- Als Polpaare bezeichnet man die konjugiert komplexen Pole eines
Schwingungssystems 2. Ordnung (PT2-Glied),
die einen realen und imaginären Anteil enthalten. Sie entstehen natürlich in
speichernden technischen Systemen durch Energieaustausch (z.B.
Feder-Massesystem) einer Regelstrecke oder durch reale Pole innerhalb eines
offenen Regelkreises, der mit einer bestimmten kritischen Kreisverstärkung K
geschlossen wird. Weitere zusätzliche Pole, die in der linken s-Halbebene
links von den Polen
 und
und  entfernt liegen, haben wenig Einfluss.
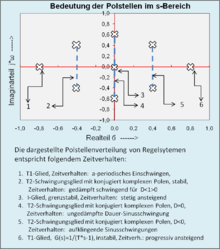
entfernt liegen, haben wenig Einfluss. - Polpaare mit negativem Realteil und Imaginärteil verursachen im Zeitbereich einen gedämpften oszillierenden Signalverlauf
- Polpaare mit verschwindendem kleinen Imaginärteil gegenüber dem negativen Realteil verursachen im Zeitbereich einen aperiodischen Signalverlauf
- Polpaare mit verschwindendem kleinem Realteil gegenüber dem Imaginärteil verursachen im Zeitbereich einen rein sinusförmig schwingenden Signalverlauf
- Pole oder Polpaare mit positivem Realteil verursachen im Zeitbereich Instabilität durch monoton zunehmenden Signalverlauf bzw. zunehmend schwingende Signalamplitude
- Instabile Pole in der rechten s-Halbebene im offenen Regelkreis dürfen nicht durch positive Nullstellen kompensiert werden, anderenfalls entsteht Instabilität.
- Pol-Nullstellenkompensation
- Ist das mathematische Modell der Regelstrecke bekannt, d.h. die Übertragungsfunktion der Regelstrecke ist bekannt, können sämtliche Verzögerungsglieder
 der Strecke durch PD-Glieder
der Strecke durch PD-Glieder des (idealen) Reglers kompensiert werden, wenn die Zeitkonstanten identisch
sind.
des (idealen) Reglers kompensiert werden, wenn die Zeitkonstanten identisch
sind.
- Die Richtigkeit dieser Darstellung ergibt sich für die Betrachtung im Frequenzbereich durch Anwendung des Bode-Diagramms oder im Zeitbereich durch Anwendung der inversen Laplace-Transformation mit einem definierten Eingangs-Testsignal.
- Die Pol-Nullstellenkompensation bei Übertragungssystemen mit Signalbegrenzungen verzerren und verzögern das Übergangsverhalten der Regelgröße y(t).
Einfluss nichtlinearer Übertragungssysteme auf den Regelkreis
Nichtlineare Übertragungssysteme wie Signalbegrenzungen und Systeme mit nichtlinearer Kennlinie können nicht durch lineare gewöhnliche Differentialgleichungen (Gewöhnliche Differentialgleichung) beschrieben werden. Deshalb können sie auch nicht wie LZI-Systeme behandelt werden. Je nach Größe bzw. Einfluss dieser Systeme kann die Regelgröße y(t) erheblich von einem gewünschten Verhalten abweichen, wenn diese Einflüsse nicht berücksichtigt werden. Möchte man für einen einschleifigen Regelkreis mit nichtlinearen Systemen den geschlossenen Verlauf der Regelgröße y(t) als Funktion der Führungsgröße oder Störgröße über die ganze Einschwingzeit betrachten, dann eignet sich dafür die Anwendung von numerischen zeitdiskreten Verfahren mit Hilfe im Handel verfügbarer Rechenprogramme oder mit eigenen Programmen durch Benutzung von Differenzengleichungen in Verbindung mit logischen Befehlen. Dies gilt auch für die Berechnung von Kombinationen von LZI-Systemen mit logischen Operatoren für die Behandlung der nichtlinearen Systeme.
- Totzeitsysteme
- können mit der Übertragungsfunktion nur im Frequenzbereich behandelt werden.
- Die sogenannte transzendente Übertragungsfunktion

- eignet sich nur für z.B. grafische Stabilitätsverfahren wie das Bode-Diagramm oder die Ortskurve des Frequenzgangs.
- Signalbegrenzung der Stellgröße
- Sie ist die häufigste nichtlineare Form von Übertragungssystemen und positioniert sich meist in der Schnittstelle des Stellgliedes zwischen Regler-Ausgang und Regelstrecken-Eingang. Wie bei dem PID-Regler bereits dargestellt, verhalten sich die klassischen Regler der analogen Bauweise durch Operationsverstärker völlig anders als digitale Regler nach dem zeitdiskreten Verfahren.
- Typische Begrenzung der Analogregler:
- Operationsverstärker zum Beispiel mit einer Versorgungsspannung von ± 15 V betrieben, werden häufig im aktiven Arbeitsbereich von ± 10 V betrieben. Ein 100 % -Signal von 10 V kommt bereits bei 13 V in die Begrenzung.
- Weiterer Nachteil: Ein PD- oder PID-Regler benötigt eine sogenannte parasitäre RC-Zeitkonstante, weil beim Differenzieren nur eine begrenzte Energie am Operationsverstärker-Ausgang mit der Standard-RC-Beschaltung zur Verfügung steht.
- Eine typische parasitäre Zeitkonstante beträgt Tpar = 0,1 · Tv.
- Numerische digitale Regler haben kein Problem mit großen Amplituden, weil nur Zahlenwerte berechnet werden. Für die Realisierung der gerätetechnischen Einrichtung der Stellgröße gilt wie für alle Regler, wenn Signalbegrenzungen auftreten, ist die Übertragungsfunktion des Regelkreises ungültig.
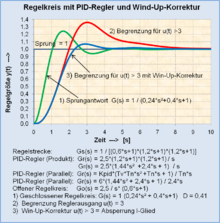
- Wind-Up-Effekt
- Der Wind–Up-Effekt bezieht sich auf Regler mit PI- oder PID-Verhalten. Die Stellgröße u, die auch im Eingang der Regelstrecke liegen kann, ist begrenzt (siehe Nichtlineare Übertragungssysteme), aber der zugehörige I-Anteil des Reglers kann noch höhere Werte annehmen. Verringert sich die Stellgröße während des Regelvorgangs unterhalb der Begrenzung, hat der I-Anteil einen zu hohen Wert angenommen, der z.B. bei einer Überschwingung der Regelgröße verspätet abgebaut wird. Die Regelgröße erreicht verspätet den Wert des Sollwertes.
- Dieser Effekt tritt bei allen Reglern mit I-Verhalten auf.
- Abhilfe geschieht durch die Wind-Up-Korrektur durch Absperrung des I-Gliedes, wenn die Stellgröße in die Begrenzung geht. Dies bedeutet, der Ausgang des I-Gliedes kann sich nur ändern, wenn die Stellgröße wieder innerhalb eines linearen Arbeitsbereiches wirkt.
- Diese Wind-Up-Korrektur gilt nur für Regler in Parallelstruktur. In der Produktdarstellung eines z.B. PID-Reglers arbeiten die PD-Glieder nicht, wenn das I-Glied abgesperrt ist.
- Die bessere Entwurfsstrategie des PID-Reglers mit Stellgrößenbegrenzung in
der Produktdarstellung ist:
- Reihenfolge der Systeme des Reglers: I-Glied – PD-Glied 1 – PD-Glied 2 – Stellgrößenbegrenzung: damit kleinere Zahlenwerte entstehen
- Bei Begrenzungen ist die Pol-Nullstellenkompensation nur ein Anhaltspunkt, Vorhaltezeit Tv gegenüber dominanter Zeitkonstante T erhöhen
- Kreisverstärkung eventuell halbieren
- Es ist aber einfacher, die Dimensionierung des Regelkreises durch einen Regler in Produktdarstellung vorzunehmen und die Parameter des Reglers in Paralleldarstellung umzurechnen und zu realisieren.
- PID-Regler in Produktdarstellung:

- PID-Regler in Paralleldarstellung:

- Umrechnung des PID-Reglers von der Produktdarstellung in die Paralleldarstellung:

- Zeitunabhängige Systeme mit nichtlinearer Kennlinie
- In der Regel wird Linearität in einem bestimmten Bereich um den Arbeitspunkt eines nichtlinearen Systems vorausgesetzt. Muss ein nichtlineares System in einem weiten Kennlinienbereich berücksichtigt werden, können Systeme mit nichtlinearer Kennlinie, wie in Artikel Regelstrecke beschrieben, durch spezielle mathematisch aufwändige Verfahren behandelt werden.
- Bei Kombinationen von gemischten linearen und nichtlinearen Systemen wird aus Gründen der Einfachheit nur die Simulation des Regelkreises mittels numerischer zeitdiskretisierter Verfahren empfohlen. Der so bestimmte Regler wird als programmierbarer digitaler Regler ausgeführt.
Kurzbeschreibung bekannter grafischer Stabilitätsverfahren
Stabilitätsbedingung mit der Ortskurve des Frequenzgangs
Die Frequenzganggleichung (Frequenzgang) des offenen Kreises wird nach Realteil und Imaginärteil aufgelöst und in ein Koordinatensystem eingetragen. Die senkrechte Achse zeigt die Daten der Imaginärteile, die waagerechten Achse die Realteile. Nach Nyquist lautet die Stabilitätsbedingung:
Wird beim Durchlaufen der Ortskurve des offenen Regelkreises Fo(jω) in Richtung steigender Werte von ω der kritische Punkt (-1; j0) auf der linken (negativen) Seite der Achse der Realteile nicht umschlungen bzw. berührt, ist der geschlossene Regelkreis stabil. Aus praktischen Erwägungen sollte der kritische Punkt (-1; j0) auf (-0,5; j0) verlegt werden, um eine gewisse Stabilitätsreserve zu erzielen.
Stabilitätsbedingung im Bode-Diagramm mit dem vereinfachten Stabilitätskriterium von Nyquist
Im Gegensatz zur Ortskurve des Frequenzgangs werden beim Bode-Diagramm Betrag und Phasenwinkel in zwei getrennten Diagrammen aufgetragen, als Amplitudengang und Phasengang. Das Bode-Diagramm hat einen logarithmischen Maßstab. Beim Amplitudengang ist der Betrag F(jω) auf der Ordinate, die Kreisfrequenz ω auf der Abszisse aufgetragen. Beim Phasengang ist der Phasenwinkel (linear) auf der Ordinate, die Kreisfrequenz ω auf der Abszisse (logarithmisch) aufgetragen.
Die Vorteile dieses Verfahrens sind das unmittelbare Einzeichnen der Asymptoten als Geraden des Amplitudengangs, die bequeme Multiplikation durch logarithmische Addition, das direkte Ablesen der Zeitkonstanten und das schnelle Erkennen der Stabilität des geschlossenen Regelkreises. Bei regulären Systemen ist der Phasengang aus dem Amplitudengang berechenbar und braucht nicht unbedingt gezeichnet zu werden.
Das Stabilitätskriterium ist aus dem Stabilitätskriterium von Nyquist abgeleitet:
Ein geschlossener Regelkreis ist stabil, wenn die nacheilende Phasenverschiebung φ vom Ausgangs- zum Eingangssignal des offenen Kreises bei der Kreisverstärkung K = 1 und φ > −180° beträgt. Die Dämpfung des geschlossenen Kreises wird umso günstiger, je größer der Phasenabstand zu der −180° -Linie beträgt. Diesen Abstand, der oberhalb der – 180°-Linie liegt, nennt man Phasenrand oder auch Phasenreserve und sollte bei etwa 50° ±10° liegen.
Stabilität mit der Wurzelortskurve
Begriffsklärung: Bei der Betrachtung des offenen zum geschlossenen Regelkreises werden die Nullstellen des Nenners der rational gebrochenen Funktion anstatt mit Polen mit Wurzeln bezeichnet.
Die Wurzelortskurve (siehe auch Wurzelortskurvenverfahren) ist eine grafische Darstellung der Lage der Pol- und Nullstellen der komplexen Führungs-Übertragungsfunktion Fo(s) eines offenen Regelkreises. In Abhängigkeit von einem Parameter, meist von der Kreisverstärkung des offenen Regelkreises, lässt sich durch die Wurzelortskurve auf die Lage der Pole des geschlossenen Regelkreises schließen. Das dynamische Verhalten des geschlossen Regelkreises ist von der Polverteilung abhängig, die wieder von der Wahl der Parameter des Reglers bestimmt wird.
Die graphische Darstellung erfolgt in der s-Ebene  ,
der Realteil
,
der Realteil  wird auf der Abszisse, der imaginäre Teil
wird auf der Abszisse, der imaginäre Teil  auf der Ordinate aufgetragen. Für die relativ aufwändige Konstruktion der
Wurzelortskurve gibt es mehrere Regeln. Wenn alle Pole und Nullstellen in der
linken Halbebene liegen (-) ,
ist der geschlossene Regelkreis stabil. Befinden sich ein Pol oder mehrere Pole
in der rechten Halbebene (+) ,
ist das System instabil. Das Wurzelortsverfahren lässt sich nicht auf Systeme
mit Totzeiten anwenden.
auf der Ordinate aufgetragen. Für die relativ aufwändige Konstruktion der
Wurzelortskurve gibt es mehrere Regeln. Wenn alle Pole und Nullstellen in der
linken Halbebene liegen (-) ,
ist der geschlossene Regelkreis stabil. Befinden sich ein Pol oder mehrere Pole
in der rechten Halbebene (+) ,
ist das System instabil. Das Wurzelortsverfahren lässt sich nicht auf Systeme
mit Totzeiten anwenden.
Hurwitz-Kriterium
Diese Stabilitätsprüfung wurde von Routh und Hurwitz entwickelt, ist aber durch Hurwitz (Hurwitz-Kriterium) bekannt geworden. Das Hurwitz-Kriterium liefert Aussagen über die Stabilität des geschlossenen Kreises auch ohne explizite Berechnung der Polstellen; die Kenntnis der homogenen Differentialgleichung oder der charakteristischen Differentialgleichung genügt. Die charakteristische Differentialgleichung ist identisch mit dem gleich Null gesetzten Nennerpolynom der Führungsübertragungsfunktion G(s) oder der Störübertragungsfunktion Gz(s):

Bedingungen für das Stabilitätskriterium:
- Die Übertragungsfunktion des geschlossenen Kreises G(s) muss bekannt sein.
- Für die Stabilität des Systems ist erforderlich, dass alle Koeffizienten a vorhanden sind und gleiches Vorzeichen haben.
- Die „Hurwitz“-Determinanten Di müssen alle > 0 sein.
- Ein Regelkreis mit Totzeitglied kann nicht behandelt werden.
Bewertung bekannter Stabilitätsverfahren für den Reglerentwurf
Für eine realistische Regelstrecke bestehend aus linearen zeitinvarianten Systemen in Verbindung mit Systemen, die sich nicht mit linearen gewöhnlichen Differentialgleichungen (Gewöhnliche Differentialgleichung) beschreiben lassen, ergeben sich für die Parametrierung der Regler folgende Einschränkungen für die angegebenen Stabilitätsverfahren.
Bezeichnungen der Übertragungssysteme:
- LZI = lineare zeitinvariante Systeme (Lineares zeitinvariantes System)
- LZV = lineare zeitvariante Systeme
- Tt = Totzeitglied (Totzeit (Regelungstechnik))
- Begrenzung eines Signals
- Nichtlineare Kennlinie (Nichtlineares System)
- MIMO = Mehrgrößensysteme, (MIMO: Multiple Input Multiple Output)
| Stabilitätsverfahren für den Reglerentwurf |
Zeit- invarianz |
Zeit- varianz |
Tot- zeit |
Begren- zung |
Nicht- linear |
MIMO | Bemerkungen |
|---|---|---|---|---|---|---|---|
| Stabilität nach Einstellanweisungen (Ziegler-Nichols und andere) |
ja | — | — | — | — | — | Für Grobeinstellung bedingt geeignet |
| Bode-Diagramm + Nyquist |
ja | — | ja | — | — | — | Phasenrandempfehlung: ca. 50° |
| Ortskurve des Frequenzgangs |
ja | — | ja | — | — | — | Kritischer Punkt: (-1; j0) Abstand |
| Hurwitz-Kriterium |
ja | — | — | — | — | — | Alle Koeffizienten a müssen vorhanden sein und ein gleiches Vorzeichen haben. Die „Hurwitz“-Determinanten Di müssen alle > 0 sein. |
| Verallgemeinertes
Nyquist-Kriterium |
ja | — | ja | — | — | — | Aus Übertragungsfunktion  wird bestimmt:
wird bestimmt: = Anzahl der Pole mit positivem Realteil,
= Anzahl der Pole mit positivem Realteil, = Anzahl der Pole auf der imaginären Achse.
= Anzahl der Pole auf der imaginären Achse.Winkeländerung 
|
| Wurzelortsverfahren |
ja | — | — | — | — | — | Wurzelortskurve in linker s-Halbebene |
| Inverse Laplace-Transformation |
ja | — | — | — | — | — | Geschlossener Verlauf y(t), aufwendige trigonometrische Berechnung bei Schwingverhalten. |
| Zustandsraum Zustandsstabilität |
ja | ja | 1) | ja | ja | ja | Gute mathematische Kenntnisse erforderlich. |
| Numerische zeitdiskrete Verfahren: käufliche Programme oder Differenzengleichungen |
ja | ja | ja | ja | ja | ja | Geschlossener Verlauf der Ausgangsfolge  . .k = Berechnungsfolge; Δt = diskrete Zeit, Systemparameter sind beliebig zu ändern. |
- 1) Gilt nur für zeitdiskrete Verfahren im Zustandsraum-Modell!
Reglerentwurf für lineare zeitinvariante Systeme
Die wichtigste Aufgabe des Reglers aus der Sicht des Führungsverhaltens ist die Regelgröße optimal – d.h. schnell und möglichst schwingungsfrei – auf das Niveau des Sollwertes zu bringen.
Liegt die Beschreibung der Regelstrecke als lineares zeitinvariantes
Übertragungssystem  in Produktdarstellung vor, kann relativ einfach ein geeigneter Regler
in Produktdarstellung vor, kann relativ einfach ein geeigneter Regler  bestimmt werden. Zur Vereinfachung des offenen Regelkreises
bestimmt werden. Zur Vereinfachung des offenen Regelkreises  werden PT1-Glieder der Strecke gegen PD-Glieder des Reglers gekürzt
(Pol-Nullstellenkompensation).
werden PT1-Glieder der Strecke gegen PD-Glieder des Reglers gekürzt
(Pol-Nullstellenkompensation).
Mit Hilfe der Gleichung für das Schließen des Regelkreises  ergibt sich die Übertragungsfunktion des geschlossenen Regelkreises in
Polynomdarstellung.
ergibt sich die Übertragungsfunktion des geschlossenen Regelkreises in
Polynomdarstellung.
Dank der bekannten Ergebnisse der Systemanalyse von Übertragungssystemen lassen sich relativ einfach die Polynome der Übertragungsfunktionen von Regelstrecken oder Regelkreisen auf drei faktorielle Grundformen mittels der Nullstellenverfahren (Bestimmung der Nullstellen von Polynomen) darstellen (siehe Artikel Charakterisierung der Regelstrecken).
Eine dieser drei Grundformen ist das PT2-Schwingungsglied, das immer bei
regulären Systemen ab zwei PT1-Gliedern mit zunehmender Kreisverstärkung des
geschlossenen Regelkreises entsteht. Aus dem gewünschten Dämpfungsgrad  des Schwingungsgliedes kann die Kreisverstärkung
errechnet werden. Der Wert des Dämpfungsgrades
entscheidet, ob die Sprungantwort der Regelgröße aperiodisch
des Schwingungsgliedes kann die Kreisverstärkung
errechnet werden. Der Wert des Dämpfungsgrades
entscheidet, ob die Sprungantwort der Regelgröße aperiodisch  ,
gedämpft schwingend
,
gedämpft schwingend  oder zunehmend schwingend
oder zunehmend schwingend  verläuft.
verläuft.
Bei Regelstrecken mit nichtregulären Systemen (instabiles T1-Glied) oder instabile Regelstrecken mit zwei I-Gliedern wird der geschlossene Regelkreis mit einem geeigneten Regler mit steigender Kreisverstärkung stabil.
Prinzipielle Methode der Parametrierung für eine LZI-Regelstrecke
- Die Übertragungsfunktion einer Regelstrecke kann als Polynom im Nenner und Zähler vorliegen. Sie kann in die Produktdarstellung überführt werden durch Berechnung der Pole und Nullstellen.
- Dominante PT1-Glieder der Regelstrecke können durch PD-Glieder des Reglers – soweit vorhanden – kompensiert werden, d.h. gleiche Zahlenwerte mit gleichem Vorzeichen der Pole und Nullstellen haben damit keine Wirkung mehr. Für die Stabilität des Regelkreises ist jeweils ein Pol mehr erforderlich als Nullstellen innerhalb der Übertragungsfunktion vorhanden sind.
- Die Dynamik des Reglers muss auf das Verhalten der Regelgröße angepasst werden. Ist eine Regeldifferenz zugunsten schnellerer Dynamik erlaubt, kann auf ein I-Glied des Reglers verzichtet werden.
- Damit der Regelkreis geschlossen werden kann, muss die Kreisverstärkung
bestimmt werden.
- Bei fehlendem I-Glied im offenen Regelkreis ist zu prüfen, ob infolge der
höheren Kreisverstärkung die Stellgröße ,
die sehr hohe Werte annehmen kann, technisch realisiert werden kann. Wenn
nicht, gilt die Übertragungsfunktion des offenen und des geschlossenen
Regelkreises nicht für das Großsignalverhalten. Für diesen Fall ist das
Übergangsverhalten der Regelgröße nach einer Eingangssignal-Änderung verzerrt
und verlangsamt.
- Mit der Schließbedingung des Regelkreises
kann ein geschätzter Wert für
eingesetzt werden. Damit entsteht ein Nennerpolynom höheren Grades,
entsprechend der Anzahl der Pole des offenen Regelkreises. Der Unterschied zum
offenen Regelkreis besteht darin, dass das Nennerpolynom des geschlossenen
Regelkreises ab einer bestimmten Kreisverstärkung PT2-Schwingungsglieder der
Normalform

- enthält. Durch Einsetzen von verschiedenen Werten der Kreisverstärkung
kann der gewünschte Dämpfungsgrad
bestimmt werden.
- Weitere evtl. vorhandene, von dem Polpaar des Schwingungsgliedes entfernte
Pole im s-Diagramm haben wenig Einfluss auf den Signalverlauf der Regelgröße
.
Eventuell vorhandene Nullstellen haben nur Einfluss auf die Amplitude des
Schwingungsgliedes.
Tabelle der Übertragungsfunktionen des offenen und geschlossenen Regelkreises
Die nachstehend aufgeführte Tabelle mit der Spalte „Offener Regelkreis“
bezieht sich auf das Produkt der Übertragungsfunktionen Regelstrecke und Regler
 des offenen (aufgeschnittenen) Regelkreises, bei dem bereits eine
Pole-Nullstellenkompensation vorgenommen worden ist und dominante PT1-Glieder
der Strecke kompensiert wurden.
des offenen (aufgeschnittenen) Regelkreises, bei dem bereits eine
Pole-Nullstellenkompensation vorgenommen worden ist und dominante PT1-Glieder
der Strecke kompensiert wurden.
Die in der Spalte der Übertragungsfunktionen des offenen Regelkreises
aufgeführten Beispiele gelten für viele Anwendungen. Sind die Parameter des
offenen Kreises bekannt, kann durch Einsetzen von
das Einschwingverhalten der Regelgröße für den geschlossenen Regelkreis bestimmt
werden. Alle Faktoren der einzelnen Übertragungselemente sind in der
Kreisverstärkung
zusammengefasst.
Die ersten 3 Anwendungsbeispiele enthalten Übertragungsfunktionen des offenen und geschlossenen Regelkreises 2. und 3. Grades.
Regelkreise höheren Grades (oder Ersatzmodelle mit dominantem Verzögerungsglied und Totzeitglied), fordern je nach Abstand der dominanten Zeitkonstante zu den restlichen Zeitkonstanten der Regelstrecke immer weitere Reduzierungen der Kreisverstärkung, damit der Regelkreis für ein gewolltes Einschwingverhalten der Regelgröße eine geringe Überschwing-Amplitude zeigt. Eine geringe Kreisverstärkung bedeutet eine größere Regeldifferenz. Mit einem I-Glied im offenen Regelkreis wird die Regeldifferenz im statischen Zustand gleich Null, gleichzeitig bedeutet dies wegen der zusätzlichen Phasenverschiebung eine weitere Reduzierung der Kreisverstärkung. Deshalb ist die Kreisverstärkung häufig < 1, wenn bei gegebenen Regelstrecken höheren Grades - oder mit Totzeit - der Regler oder die Strecke einen I-Anteil hat.
Regelkreise mit instabilen Komponenten der Regelstrecke wie das instabile
PT1-Glied  oder eine Regelstrecke mit zwei I-Gliedern werden in Verbindung mit einem
PD1-Glied mit steigender Kreisverstärkung stabil.
oder eine Regelstrecke mit zwei I-Gliedern werden in Verbindung mit einem
PD1-Glied mit steigender Kreisverstärkung stabil.
Regelstrecken mit Totzeit siehe Abschnitt Reglerentwurf für eine Modellregelstrecke mit Totzeit und Totzeitregelstrecken
Anmerkung: Die Berechnung des geschlossenen Regelkreises erfolgt
numerisch mit Differenzengleichungen der einzelnen Komponenten und vereinfacht
sich, wenn die einzelnen Komponenten des offenen Regelkreises herangezogen
werden und die Schließbedingung mit  vollzogen wird. Gründe dafür sind Stellgrößenbegrenzungen und Totzeitglieder,
welche durch Übertragungsfunktionen
nicht beschrieben werden können.
vollzogen wird. Gründe dafür sind Stellgrößenbegrenzungen und Totzeitglieder,
welche durch Übertragungsfunktionen
nicht beschrieben werden können.
| Typ |
Offener Regelkreis (bearbeitet mit Pole-Nullstellenkompensation) |
Geschlossener Regelkreis |
Geschlossener Regelkreis Sprungantwort y(t) bei u(t) = 1 |
|---|---|---|---|
| 1 | Reihenschaltung PT1-Glied + I-Glied: Pole: 
|
 Polynom: 
|
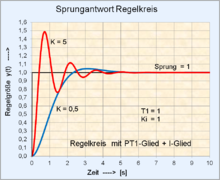
|
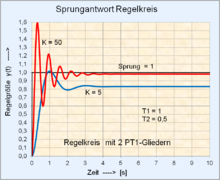
| 2 | Reihenschaltung 2 PT1-Glieder: Pole: 
|
 Koeffizienten: a2 = T1 * T2 / (K+1); a1 = (T1+T2) / (K+1) |
|
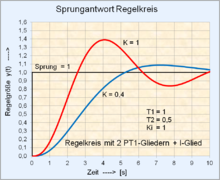
| 3 | Reihenschaltung 2 PT1-Glieder + I-Glied: Pole: 
|
 Koeffizienten: a3 = T1 * T2 / K; a2 = (T1+T2) / K; a1 = 1 / K |
|
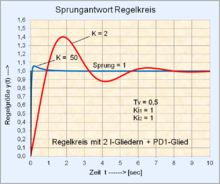
| 4 | Reihenschaltung 2 I-Glieder + PD1-Glied: Pole:  ;
Nullstelle: ;
Nullstelle: 
|

|
|
| 5 | Reihenschaltung Instab. T1-Glied + I-Glied +
PD1-Glied: Pole:  ;
Nullstelle: ;
Nullstelle: Positive Pole dürfen nicht kompensiert werden! |

|
|
Entwurf eines Reglers durch Polzuweisung in der s-Ebene
Das nachfolgend beschriebene Entwurfsverfahren besteht darin, dass Pole und Nullstellen einer Übertragungsfunktion eines geschlossenen Regelkreises in bestimmte Bereiche des Pol-Nullstellen-Diagramms zugewiesen werden, um bestimmte Güteanforderungen festzulegen. Dabei wird vorausgesetzt, dass ein dominantes Schwingungsglied (PT2-Glied) vorliegt, evtl. vorhandene zusätzliche Pole weit genug vom dominanten Polpaar entfernt in der linken s-Halbebene liegen und deshalb wenig Einfluss haben.
Aufgabe eines Reglers ist nun, die zugewiesene Lage der Pole zu erfüllen.
Es wird davon ausgegangen, es handelt sich im Idealfall um die Führungsübertragungsfunktion 2. Ordnung mit konjugiert komplexen (Komplexe Zahl) Polen. Die allgemeine Darstellung der Übertragungsfunktion des geschlossenen Regelkreises als PT2-Glied lautet:
 ;
mit
;
mit  und
und 
Der Dämpfungsgrad (Dämpfung)
lautet:

Die Überschwingzeit  ist definiert als die Zeit vom Start des Eingangssprungs
bis zum Scheitelwert der ersten Halbwelle der Überschwingung der Regelgröße
ist definiert als die Zeit vom Start des Eingangssprungs
bis zum Scheitelwert der ersten Halbwelle der Überschwingung der Regelgröße
 .
ist damit ein Maß für die Schnelligkeit der Regelung.
.
ist damit ein Maß für die Schnelligkeit der Regelung.


Zur Bestimmung der Pole:

wird das Nennerpolynom der Übertragungsfunktion umgeformt:


Die Größen  und
haben folgende Einflüsse auf das Schwingungsverhalten der Regelgröße:
und
haben folgende Einflüsse auf das Schwingungsverhalten der Regelgröße:
- Dämpfungsgrad
-
bestimmt die Höhe der Überschwingweite
 einer Sprungantwort. Die Überschwingweite
ist definiert als Größe des Scheitelwertes der 1. Schwingamplitude zum
stationären Wert der Regelgröße
einer Sprungantwort. Die Überschwingweite
ist definiert als Größe des Scheitelwertes der 1. Schwingamplitude zum
stationären Wert der Regelgröße

- Realteil
 des Polpaares
des Polpaares
- Die Lage des Realteils
des Polpaares in der linken negativen s-Halbebene hat keinen Einfluss auf die
Schwingfrequenz, bestimmt aber die Dämpfung der Regelgröße .
- Mit steigendem Betrag des Realteils bei konstantem Imaginärteil erhöht
sich der Wert der Dämpfung ,
vermindert sich die Überschwingung
und damit die Überschwingamplitude. Die Schwingfrequenz bleibt konstant.
Deshalb ist auch die Überschwingzeit
ungefähr konstant.
- Imaginärteil
des Polpaares
- Die Größe des Betrages des Imaginärteils bei konstantem Betrag des
Realteils bestimmt die Größe der Amplituden der Überschwingungen und damit die
Überschwingweite .
- Mit steigendem Imaginärteil und konstantem Realteil des Polpaares
verkleinert (verschlechtert) sich der Wert der Dämpfung ,
vergrößert sich die Überschwingweite
und verkleinert sich die Überschwingzeit .
- Bei konstantem Betrag des Imaginärteils und änderndem Realteil ist die Schwingfrequenz konstant bei unterschiedlichen Amplituden.
- Mit
 und
und  kann ein Winkelbereich in der linken s-Halbebene festgelegt werden, der eine
konstante Dämpfung
für den Betrag des Imaginäteils vorgibt. Für
kann ein Winkelbereich in der linken s-Halbebene festgelegt werden, der eine
konstante Dämpfung
für den Betrag des Imaginäteils vorgibt. Für  beträgt
beträgt  .
.
- Mit steigender Größe des Betrages des Realteils auf der realen Achse und
des Imaginärteils entlang des Winkelstrahls
 wird die Regelung schneller bei konstanter Dämpfung. Die Ursache ist darin
begründet, dass große Realteile der Polpaare kleine Zeitkonstanten
bedeuten.
wird die Regelung schneller bei konstanter Dämpfung. Die Ursache ist darin
begründet, dass große Realteile der Polpaare kleine Zeitkonstanten
bedeuten.
- Sind die Absolutbeträge
und
gleich, dann beträgt die Dämpfung
immer
 .
Dies bedeutet eine Überschwingweite
von ca. 5 %.
.
Dies bedeutet eine Überschwingweite
von ca. 5 %. - Bei Polpaaren mit dem Verhältnis der Absolutbeträge
 und
und  beträgt der Dämpfungsgrad
beträgt der Dämpfungsgrad  .
Dies bedeutet eine Überschwingweite
.
Dies bedeutet eine Überschwingweite  .
.
Strategie der Polzuweisung für einen gegebenen offenen Regelkreis:
Ausgangssituation: Es liegt eine Übertragungsfunktion des offenen
Regelkreises vor und die Anzahl der verfügbaren PD-Glieder (Nullstellen) des
Reglers für die Pol-Nullstellenkompensation sind verbraucht. Die
Übertragungsfunktion des offenen Regelkreises 2. oder höherer Ordnung (mit
I-Anteil) ist gegeben. Der geschlossene Regelkreis soll bezüglich des
Führungsverhaltens optimal schnell und überschwingungsarm regeln. Weil in diesem
Fall nur der Parameter der Kreisverstärkung
zur Verfügung steht, ist es Ermessenssache, ob man einer guten Dämpfung
oder einer kurzen Überschwingzeit
den Vorrang gibt.
- In der linken s-Halbebene senkrecht zur realen Achse kann ein Wert
eingetragen werden, der eine Mindest-Systemgeschwindigkeit repräsentiert.
Dieser Absolutwert für
ist abhängig von der Größe der Zeitkonstanten der PT1-Glieder des offenen
Regelkreises. Der Betrag dieses Wertes sollte nicht unterschritten werden. Für
einen gegebenen offenen Regelkreis und einen gegebenen Dämpfungsbereich ist
der Spielraum für eine Mindestsystemgeschwindigkeit gering. Parameter ist nur
die Kreisverstärkung .
- In der linken s-Halbebene werden symmetrisch zur realen Achse zwei
Winkelstrahlen
 für die gewünschte Dämpfung eingetragen. Es empfiehlt sich ein Winkelbereich
z.B. für einen unteren und oberen Dämpfungswert
festzulegen, also 4 Winkelstrahlen.
für die gewünschte Dämpfung eingetragen. Es empfiehlt sich ein Winkelbereich
z.B. für einen unteren und oberen Dämpfungswert
festzulegen, also 4 Winkelstrahlen. - Der offene Regelkreis wird mit dem Parameter der Kreisverstärkung
der Schließbedingung unterzogen. Für verschiedene Werte von
werden die Pole bestimmt. Dazu bedient man sich am einfachsten mit einem
Rechenprogramm zur Ermittlung von Nullstellen aus Polynomen.
Für die Pole, deren Imaginär-Anteile  innerhalb des zulässigen oberen und unteren Winkelbereichs konstanter Dämpfung
liegen, kann die zugehörige Kreisverstärkung gewählt und festgelegt werden.
innerhalb des zulässigen oberen und unteren Winkelbereichs konstanter Dämpfung
liegen, kann die zugehörige Kreisverstärkung gewählt und festgelegt werden.
Fazit: Der Reglerentwurf mit Hilfe der Polzuweisung ist eine sehr
interessante Methode. Die etwas aufwendige Bestimmung der Pole bei Polynomen 3.
und 4. Ordnung kann bei Anwendung eines Rechners erheblich vereinfacht werden.
Wenn aber ein Rechner zur Verfügung steht, dann kann bei Anwendung von
Simulationen mit digitalen zeitdiskreten Rechenprogrammen erheblich einfacher
der geschlossene Verlauf der Regelgröße
in Abhängigkeit von einem Test-Eingangssignal berechnet und graphisch
dargestellt werden.
Reglerentwurf mit der inversen Laplace-Transformation
Ist die Übertragungsfunktion eines linearen dynamischen Systems oder eines geschlossenen Regelkreises gegeben, kann mittels der inversen Laplace-Transformation mit einem definierten Eingangs-Testsignal der Verlauf der Ausgangsgröße bzw. die Regelgröße errechnet und graphisch dargestellt werden. Dabei bedient man sich einer in jedem Fachbuch der Regelungstechnik vorhandenen Laplace-Transformationstafel, welche für viele Formen der Produktdarstellung einer Übertragungsfunktion im s-Bereich die korrespondierende Funktion im Zeitbereich darstellt.
Die Ausgangsgröße eines dynamischen Systems im s-Bereich lautet:

Die Ausgangsgröße eines dynamischen Systems
des Zeitbereichs für ein Übertragungssystem im s-Bereich lautet:
Testsignale zur Berechnung der Systemantwort:
| Testsignal | Zeitbereich |
Testsignal im s-Bereich | Systemantwort
|
|---|---|---|---|
| Impulsfunktion | Normierter Impuls =  |
 |
Gewichtsfunktion |
| Sprungfunktion | Einheitssprung  für
für  |
 |
Übergangsfunktion |
| Anstiegsfunktion |  Gradient:  |
 |
Rampenantwort |
Die grafische Darstellung der Sprungantwort (Übergangsfunktion) eines
dynamischen Systems ist die häufigste bekannte Darstellung des
System-Zeitverhaltens. Wird als Suchbegriff die korrespondierende Zeitfunktion
in den Laplace-Korrespondenztabellen gefunden, kann durch Einsetzen
verschiedener Werte für  das Systemverhalten für ein gegebenes Eingangssignal grafisch dargestellt
werden.
das Systemverhalten für ein gegebenes Eingangssignal grafisch dargestellt
werden.
Beispiel der Anwendung der Laplace-Korrespondenztabelle für ein dynamisches System mit reellen Polen
| Es ist darauf zu achten, dass manche Korrespondenztabellen im
s-Bereich in der Pol-Nullstellen- Darstellung oder Zeitkonstanten-Darstellung definiert sind. Verstärkungsfaktoren werden nicht transformiert und sind im s-Bereich und Zeitbereich identisch. Gegeben: Übertragungsfunktion für zwei PT1-Glieder in Reihenschaltung: Eingangssignal: Sprungfunktion U(s) = 1/s Gesucht: Zeitverhalten der Systemausgangsgröße Lösung: Übergangsfunktion (Sprungantwort) Die nachfolgende Gleichung für |


![y(t)={\frac {1}{a\cdot b}}\cdot {\bigg [}1-{\frac {b}{b-a}}\cdot e^{-a\cdot t}+{\frac {a}{b-a}}\cdot e^{-b\cdot t}{\bigg ]}](/svg/cd418692b7dd65d36773cb7bf5d8eb86b630304e.svg)
Anmerkung: Die Anwendung der inversen Laplace-Transformation fordert bei gedämpft schwingenden Systemen viel Rechenarbeit mit trigonometrischen und exponentiellen Funktionen.
Reglerentwurf mittels Einstellregeln (Heuristische Verfahren)
Die von Ziegler-Nichols bereits in den 1940er Jahren experimentell durchgeführten Einstellregeln beziehen sich auf die Sprungantwort einer Regelstrecke und definieren sie durch Anlegen einer Tangente am Wendepunkt als Strecke mit einem PT1-Glied und einem Totzeitglied. 1952 wurden von Chien, Hrones und Reswick die Einstellregeln (Faustformelverfahren (Automatisierungstechnik)) erweitert für aperiodisches Verhalten der Sprungantworten der Regelgröße und für gedämpft schwingendes Verhalten mit 20 % Überschwingungen. Zusätzlich erfolgt für beide Gruppen noch die Aufteilung in Führungsverhalten und Störverhalten. Diese Einstellregeln werden gelegentlich auch mit Faustformeln bezeichnet.
Die als Ersatzregelstrecke definierte PT1-Tt-Modell-Regelstrecke

eignet sich je nach Art und Ordnung der Originalregelstrecke nur bedingt mit den vorgegebenen Einstelldaten für die Parametrierung. Als Modell-Regelstrecke für eine Optimierung eines Regelkreises ist sie zu ungenau.
Ferner eignet sich diese PT1-Tt-Modell-Regelstrecke nicht für LZI-Systeme mit einer Totzeit.
Siehe Verhalten eines Regelkreises mit einem parametrierten Regler nach Einstellregeln laut grafischer Darstellung im Kapitel „Reglerentwurf für eine Modellregelstrecke mit Totzeit“
Reglerentwurf für eine Modellregelstrecke mit Totzeit und Totzeitregelstrecken
Seit der Kenntnis der sogenannten heuristischen Regler-Einstellverfahren wie z.B. die von Ziegler-Nichols existiert der Begriff der „Regelbarkeit“ einer (ungenauen) Ersatzregelstrecke mit dem Verhältnis Anstiegszeit zu Ersatztotzeit. Dabei wird die „Regelbarkeit“ diese Ersatzregelstrecke mit steigender Ersatztotzeit im Verhältnis zur Anstiegszeit als schwierig dargestellt. Tatsächlich ist die Regelung einer Regelstrecke mit großem Totzeitanteil genau so einfach zu regeln wie bei kleinem Totzeitanteil, jedoch ist die Dynamik des Regelkreises mit steigender Totzeit ungünstig. Abhilfe sind Regler mit Spezialstrukturen wie z.B. das Verfahren des Smith-Prädiktors.
- Regelstrecke mit reiner Totzeit
Enthält die Regelstrecke neben PT1-Gliedern eine im Verhältnis zu einer
dominanten Zeitkonstante  nennenswerte Totzeit t,
ist ein I-Glied innerhalb des Regelkreises notwendig. Eine aus reiner Totzeit
bestehende Regelstrecke kann nur – abgesehen von Spezialreglern – durch einen
I-Regler geregelt werden.
nennenswerte Totzeit t,
ist ein I-Glied innerhalb des Regelkreises notwendig. Eine aus reiner Totzeit
bestehende Regelstrecke kann nur – abgesehen von Spezialreglern – durch einen
I-Regler geregelt werden.
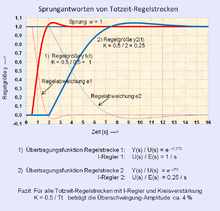
Die Regelung einer Regelstrecke mit reiner Totzeit mit einem I-Regler weist eine Besonderheit auf, dass die Kreisverstärkung
 ;
mit
;
mit  :
beliebiger Faktor
:
beliebiger Faktor
bei festem
für alle Totzeiten  zu gleicher Dämpfung
zu gleicher Dämpfung  führt. Wählt man
führt. Wählt man

beträgt die Überschwingung ca. ü = 4 %, was einer Dämpfung von ca. D = 0,7 entspricht.
- Regelstrecke mit Totzeit und weiteren PT1-Gliedern

Es liegt nahe, diese Beziehung für Regelstrecken mit PT1- und
Totzeit-Systemen zu nutzen, in dem die Regelstrecke durch ein Modell mit  = Ersatztotzeit und 2 PT1-Gliedern mit gleichen Zeitkonstanten
= Ersatztotzeit und 2 PT1-Gliedern mit gleichen Zeitkonstanten

ersetzt wird. Der zugehörige passende Regler ist:

Dieses Modell ist für einen PID-Regler geeignet, indem die beiden PD-Glieder des Reglers die beiden PT1-Glieder des Regelstreckenmodells kompensieren. Es ist auch für Regelstrecken mit PT1-Gliedern und Totzeit-Gliedern geeignet.
Übrig bleibt die transzendente Übertragungsfunktion des offenen Regelkreises mit

mit  für eine Dämpfung von ca. D = 0,7.
für eine Dämpfung von ca. D = 0,7.
Damit sind alle Parameter des Reglers für das Modell und für die reale Regelstrecke bekannt.
(Siehe Artikel #Experimentelle Identifikation einer Regelstrecke mit Hilfe einer Modellregelstrecke).
Regelung im Zustandsraum (Übersichtsdarstellung)
Siehe auch Kapitel Regelstrecke im Zustandsraum
Regelkreis im Zustandsraum
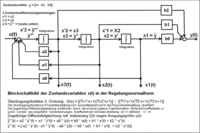
Die Zustandsraumdarstellung ist eine von mehreren bekannten Formen der Systembeschreibung eines dynamischen Übertragungssystems. Sie bezieht sich auf ein Zustandsraummodell, welches meist ein Schema der Regelungsnormalform oder der Beobachtungsnormalform beschreibt.
Das Zustandsraummodell symbolisiert die überführte Differenzialgleichung n-ter Ordnung in n-gekoppelte Zustands-Differentialgleichungen erster Ordnung. Dabei werden sämtliche Beziehungen der Zustandsgrößen (= Zustandsvariablen), der Eingangsgrößen und Ausgangsgrößen in Form von Matrizen und Vektoren dargestellt.
Die Zustandsvariablen eines linearen dynamischen Übertragungssystems beschreiben den inneren Bewegungsablauf des Systems. Sie repräsentieren physikalisch den Energiegehalt der in einem dynamischen System enthaltenen Speicherelemente. Sie bedeuten z.B. Spannung an einem Kondensator, Strom in einer Induktivität, bei einem Feder-Massesystem die potentiellen und kinetischen Energieanteile.

Nach dem Signalflussplan der Regelungsnormalform kann mit Hilfe der zurückgeführten Zustandsvariablen ein dynamisch vorteilhafter Zustands-Regelkreis gebildet werden, der ohne Matrizendarstellung mittels numerischer Berechnung aller vorliegenden Signalgrößen simuliert werden kann.
Weil die Signalinformationen der Zustandsvariablen der Regelstrecke frühzeitiger zur Verfügung stehen als bei der Ausgangsrückführung, ist das dynamische Verhalten des Regelkreises besser als ein Regelkreis mit Ausgangsrückführung. Mit einem Zustandsregler lassen sich hohe Anforderungen an die Regelgüte erfüllen.
Für eine gegebene Regelstrecke können in der Praxis nicht immer alle Zustandsvariablen gemessen werden. Abhilfe geben Beobachter durch Rekonstruktion der Zustandsvariablen, wenn die Strecke beobachtbar ist. Bei der Regelung im Zustandsraum handelt es sich immer um ein wirtschaftliches Kosten-Nutzen-Problem.
Zustandsregler im Zustandsregelkreis
Das Grundprinzip des Zustandsreglers ist die Rückführung der inneren Informationen des Prozesses, also die Rückführung der Zustandsvariablen. Deshalb kann die Zustandsregelung als eine Erweiterung des Prinzips der Kaskadenregelung angesehen werden.
Simulationen eines Zustandsregelkreises können mit einem guten Modell der Regelstrecke an einem programmierbaren Rechner einfach durchgeführt werden. Die Beschreibung des Signalflussplanes der Regelstrecke und des Reglers im Zustandsraum kann sowohl in Form von Matrizen als auch mit der numerischen zeitdiskreten Berechnung erfolgen. Je nach Höhe der Ordnung der Differentialgleichung werden alle Zustandsgrößen einem Zustandsregler zugeführt, der auf den Eingang des Zustandsraummodells der Regelstrecke wirkt.
Der lineare Zustandsregler bewertet die einzelnen Zustandsvariablen der Regelstrecke mit Faktoren und summiert die so entstandenen Zustandsprodukte zu einem Soll-Istwert-Vergleich.

Es handelt sich bei diesem Zustandsregler nicht um einen P-Regler, wenngleich
ein solcher Eindruck laut Signalflussplan entstehen könnte. Die mit dem Regler
zurückgeführten Zustandsvariablen mit Bewertungsfaktoren durchlaufen noch einmal
die Rechenschaltung zur Lösung der Differenzialgleichung mit n Integratoren
und bilden neue Kreisvariablen, wodurch differenzierendes Verhalten entsteht.
Deshalb entspricht die Wirkung der zurückgeführten Zustandsgrößen je nach Höhe
der Ordnung n der Differenzialgleichung der Strecke der eines  -Reglers.
-Reglers.
Als Entwurfsstrategie für die Bestimmung der Bewertungsfaktoren des
Zustandsreglers gilt die Polzuweisung (Polvorgabe)
des geschlossenen Regelkreises. Auch empirische Einstellungen eines
Modellregelkreises sind leicht möglich. Durch die Hintereinanderschaltung der
Integratoren ist nur die Zustandsvariable x1(t) = y(t) eine
stationäre Größe, wenn die Eingangsgröße
konstant ist. Alle anderen Zustandsvariablen – eine stabile Regelstrecke
vorausgesetzt – streben gegen den Wert null. Nach Einstellung und Optimierung
des Faktors k1 ergibt sich ein stabiler Regelkreis bestimmter
Dämpfung mit einem Proportionalfehler der Regelgröße
gegenüber .
Die anderen Faktoren der Zustandsvariablen werden hintereinander beispielsweise
zur Optimierung des Übergangsverhaltens eingestellt.
Ein Vorfilter vor dem Soll-Ist-Vergleich korrigiert den statischen Fehler
zwischen
und .
Durch Einfügen eines überlagerten PI-Reglers verschwinden die Nachteile des
einfachen Zustandsreglers. Das Vorfilter wird dann nicht mehr benötigt.
Regelkreis mit unstetigen Reglern
Unstetige Regler haben nur gestufte Ausgangssignale. Diese schaltenden Regler sind kostengünstig bei der Regelung der Temperatur, des Druckes und des Niveaus von Flüssigkeiten.
Der Zweipunktregler
hat als Stellgröße 2 Zustände, beispielsweise („Ein“, „Aus“). Er ist nur für
proportional wirkende Regelstrecken geeignet, weil dieser Regler eine Regelgröße
durch ständiges Ein- und Ausschalten auf das gewünschte Niveau regelt. Mit
steigender Hysterese des Reglers wird die Schaltfrequenz reduziert.
Der Dreipunktregler hat 3
Zustände der Stellgröße. Zum Beispiel („Vorwärts“, „Stop“, „Rückwärts“). Er wird
für integral wirkende Regelstrecken wie beispielsweise motorische Stellantriebe
verwendet.
Unterschiede der Entwurfsstrategie der stetigen und unstetigen Regler
Stetige Regler werden so dimensioniert, dass die PD-Glieder des
Reglers die PT1-Glieder der Regelstrecke kompensieren. Das gewünschte
Einschwingverhalten des Regelkreises wird über die P-Verstärkung des Reglers
eingestellt.
Das Zeitverhalten der Regelgröße y(t) kann über die
Übertragungsfunktion des geschlossenen Regelkreises für jedes
Laplace-transformierte Eingangs-Testsignal
w(t) algebraisch berechnet werden.
Stetige Regler verhalten sich linear, wenn keine Stellgrößenbegrenzung auftritt. Eine hohe P-Verstärkung und die PD-Glieder des Reglers verursachen immer hohe Stellgrößen. Stoßen die Stellgrößen in der Praxis an ihre physikalische Grenze, wirkt der Regler als nichtlineares Übertragungsglied. Übliche Berechnungen mit der Übertragungsfunktion sind dann nicht mehr gültig.
Bei einem unstetigen Regler tritt dieses Verhalten der Stellgrößenbegrenzung nicht auf. Es existieren nur bekannte Stellgrößen u(t) mit dem Wert UMAX, Null oder -UMAX. Die maximale Führungsgröße w(t) des Regelkreises muss stets kleiner sein, als die maximale Stellgröße UMAX des Reglers.
Weil der ideale Zweipunktregler theoretisch eine unendlich hohe Verstärkung hat, stellt sich die Schaltfrequenz für die Stellgröße u(t) im Regelkreis automatisch ein.
Beim Entwurf des unstetigen Reglers für einen Regelkreis wird die Schaltfrequenz und das Einschwingverhalten der Regelgröße durch die Parameter der Hysterese, Totzone und zeitabhängigen Rückführung eingestellt.
Regelkreis mit Zweipunktreglern
Zur Funktionsweise siehe Regler#Zweipunktregler.
Der Zweipunktregler ist ein sehr schneller Regler mit sehr guten dynamischen Eigenschaften. Mit einer geeigneten Rückführung kann ein angepasster elektronischer Zweipunktregler die Welligkeit des Signals der Regelgröße auf weniger als 0,1 % reduzieren und statische Störgrößen innerhalb der Regelstrecke besser als jeder andere analoge Standardregler kompensieren.

Dieses vorteilhafte Verhalten des Zweipunktreglers im Vergleich zu einem
analogen Standardregler erfolgt daher, dass der Zweipunktregler stets mit der
maximal zur Verfügung stehenden Energie auf jede Regeldifferenz sofort reagiert.
Je nach Größe des Sollwertes und der Amplitude der Stellgröße, die einer
rechteckförmigen Schwingung entspricht, ist die Anstiegsgeschwindigkeit der
Regelgröße unterschiedlich. Für eine gegebene Regelstrecke mit der maximalen
Stellgröße UMAX handelt es sich bei verschiedenen Werten der
Führungsgröße
jeweils um Ausschnitte der Sprungantwort der Regelstrecke. (siehe Bild: Zweipunktregler
für eine Regelstrecke 1. Ordnung).
Für einen Führungsgrößensprung
wird der Zeitraum der Änderung der Regelgröße von  bis zum Erreichen des Sollwertes mit Anregelzeit tANR
bezeichnet.
bis zum Erreichen des Sollwertes mit Anregelzeit tANR
bezeichnet.
Überschwingungen bei einem Führungsgrößensprung werden dadurch vermieden, dass geeignete Rückführungen die Regeldifferenz so verstimmen, dass eine vorzeitige Abschaltung der Stellgröße erfolgt.
Störgrößen innerhalb der Regelstrecke werden im Takt der Schaltfrequenz
kompensiert. Eine statische Störgröße am Ausgang der Regelstrecke hat das
gleiche Zeitverhalten wie bei allen anderen Standardreglern. Es entspricht dem
Verhalten der Sprungantwort nach einem Führungsgrößensprung.
Im Vergleich mit
stetigen Reglern muss berücksichtigt werden, dass der Zweipunktregler keine
negative Stellgröße hat. Bei der Stellgröße Null des Zweipunktreglers verläuft
die Regelgröße
entsprechend dem Systemverhalten der Strecke exponentiell auf den Wert
Null.
Vorzüge der Zweipunktregler:
- Schneller Anstieg der Regelgröße entsprechend der Sprungantwort der Regelstrecke,
- Die Systemgeschwindigkeit kann erhöht werden, wenn beispielsweise die maximale Stellgröße UMAX auf einen zulässigen Wert erhöht wird. Die Anregelzeit tANR wird dadurch verkürzt.
- Schnelle Korrektur bei Angriff einer Störgröße innerhalb der Regelstrecke,
- Beherrschung großer Energien bei geringer Verlustleistung,
- Es wird nur eine Polarität einer Energiequelle benötigt,
- Einfache Fachkenntnisse für das Bedienungspersonal erforderlich
Nachteile der Zweipunktregler:
- Eine geringe Restwelligkeit als Überlagerung der Regelgröße
ist immer vorhanden,
- Leichte Überschwingung der Regelgröße bei kleinem Sollwert .
- Da die Sprungantwort der Regelgröße
nach einem Sollwertsprung w(t) immer nach Ausschnitten aus der Sprungantwort
der Regelstrecke verläuft, ist die Systemgeschwindigkeit beziehungsweise die
Anregelzeit tANR sehr unterschiedlich. Die Optimierung des
Einschwingverhaltens der Regelgröße erfolgt bei maximalem Sollwert.
- Störstrahlung bei elektronischen und mechanischen Schaltern muss berücksichtigt werden.
- Mechanische Schalter unterliegen einem Verschleiß.
Entwurfsstrategie für einen Zweipunktregler mit verzögert nachgebender Rückführung (PID-ähnliches Verhalten)
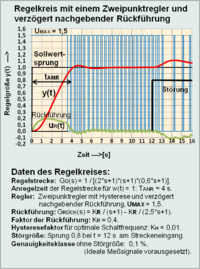
- Sprungantwort der Regelstrecke aufnehmen
- Die Größe des Eingangssprungs entspricht der maximalen Stellgröße
UMAX des Reglers. Die Führungsgröße
muss stets kleiner sein, als die maximale Stellgröße UMAX
des Reglers.
- Festlegung der Anregelzeit tANR für den maximalen
Sollwert
anhand der Übergangsfunktion der Regelstrecke.
- Die ungefähre Anregelzeit ist bestimmt durch die Zeitdifferenz des
Eingangssprungs UMAX bis zum Wert der Ausgangsgröße der
Regelstrecke, die dem maximalen Sollwert w(t) entspricht. Die tatsächliche
Anregelzeit ergibt sich im geschlossenen Regelkreis für die Regelgröße
unter den sonst gleichen Bedingungen.
- Bestimmung der Übergangsfunktion der verzögert nachgebenden Rückführung:
- Die Übergangsfunktion der verzögert nachgebenden Rückführung wird so angepasst, dass die Impulsbreite bei 1/3 über der Basis etwa 10 % größer als die Anregelzeit tANR wird. Würde die Pulsbreite kleiner gewählt, erfolgt keine frühzeitige Abschaltung der Stellgröße beim Einschwingen der Regelgröße auf den Sollwert.
- Der zeitliche Verlauf der Sprungantwort der Rückführung ergibt sich durch die inverse Laplace-Transformation der Übertragungsfunktion in den Zeitbereich.
- Der normierte Eingangssprung 1 der zeitabhängigen Rückführung mit dem Signal UMAX beträgt:

- Das Ausgangssignal der Rückführung uR mit den zwei PT1-Gliedern in Differenzschaltung beträgt laut inverser Laplace-Transformation:
![{\displaystyle u_{R}(t)=K_{R}\cdot U_{MAX}\cdot [(1-e^{-{\frac {t}{T1}}})-(1-e^{-{\frac {t}{T2}}})]}](/svg/fffb7ef3cd9f98840364b651df29987ef2da4632.svg)
- Das Signal der Rückführung uR(t) verläuft exponentiell ansteigend und dann exponentiell abfallend wie ein einzelner sinusähnlicher Impuls, der nach genügend langer Zeit zu Null wird. Mit dem Faktor KR wird die Größe der Amplitude des Impulses und damit der Einfluss der Rückführung eingestellt.
- Einstellung der Hysterese
- Die Hysterese des Reglers hat besonders bei einer Regelstrecke 1. Ordnung eine große Bedeutung, weil die sich einstellende Schaltfrequenz zu hoch ist. Mit steigendem Hystereseeinfluss uH(t) wird die Schaltfrequenz reduziert. Für Regelstrecken höherer Ordnung genügt eine Einstellung der Größenordnung 0,1 % der maximalen Regeldifferenz e(t), weil meistens eine Erhöhung der Schwingfrequenz erforderlich ist.
Verhalten eines Regelkreises mit verzögert nachgebender Rückführung des Reglers
- Durch eine negativ wirkende verzögert nachgebende Rückführung wird die Schaltfrequenz eines Regelkreises erhöht.
- Die Rückflanke des Impulses der verzögert nachgebenden Rückführung schaltet die Stellgröße nach einem Sollwertsprung früher aus und reduziert damit die Überschwingung der Regelgröße.
- Nach dem Einschwingen der Regelgröße nimmt die Amplitude des zurückgeführten Impulses exponentiell ab und wird zu Null. So entsteht keine bleibende Regeldifferenz.
- Jede Schaltamplitude ruft am Ausgang der Rückführung eine vorübergehende kleine Verstimmung der Regeldifferenz hervor. Die gewünschte höhere Schaltfrequenz bleibt damit erhalten.
- Ohne Rückführung würde die Regelgröße bei einer Regelstrecke dritter Ordnung mit der Amplitude der Größenordnung ± 10 % des Sollwertes langsam schwingen.
- Mit einer geeigneten Rückführung können Überlagerungen der Regelgröße auf < 0,1 % reduziert werden. Rauschfreies Messsignal der Regelgröße vorausgesetzt!
Regelkreis mit Dreipunktreglern
Zur Funktionsweise siehe Regler#Dreipunktregler.
Dreipunktregler
mit drei Schaltzuständen haben einen Eingang und zwei Ausgänge und schalten
jeden der beiden Ausgänge in den Zustand „Ein“ oder „Aus“ oder „beide Ausgänge
aus“ in Abhängigkeit von bestimmten kleinen positiven oder negativen Werten des
Eingangssignals  .
Sie erlauben, zwei unterschiedliche Energiearten zu schalten, und haben eine
meist symmetrische „Totzone“ mit einem oberen und unteren Grenzwert der
Regeldifferenz ,
in der um den Bereich des Nullpunktes der Regeldifferenz keine Schaltaktivitäten
stattfinden.
.
Sie erlauben, zwei unterschiedliche Energiearten zu schalten, und haben eine
meist symmetrische „Totzone“ mit einem oberen und unteren Grenzwert der
Regeldifferenz ,
in der um den Bereich des Nullpunktes der Regeldifferenz keine Schaltaktivitäten
stattfinden.
Alternativ haben Dreipunktregler anstelle der zwei Schalter als Ausgangsgröße u(t) eine positive und eine negative Stellgröße mit den Werten UMAX, -UMAX und eine Totzone, in der u(t) den Wert Null hat.
Anwendungen des Dreipunktreglers
- Anwendungen findet man häufig bei motorischen Stellantrieben für Vor- und Rücklauf und in allen Arten integral wirkenden Regelstrecken.
- Bei proportionalen Regelstrecken mit unterschiedlichen dominanten Zeitkonstanten (Beispiel: schnelle Aufheizung und langsame Abkühlung) kann die Reaktionsgeschwindigkeit der Regelgröße für Führungsgrößenänderungen verbessert werden, wenn anstelle des Zweipunktreglers an einer Heizungsregelstrecke ein Kühlaggregat über einen Dreipunktregler eingeschaltet wird.
- Andere Anwendungen des Dreipunktreglers mit unsymmetrischer Totzone sind bekannt zur Reduzierung der Schwankungsbreite der Regelgröße durch Regelung einer Grundlast mit aufgesetzter Teillast. Beispiel: Glühofen mit zwei Heizeinrichtungen.
Entwurf des Dreipunktreglers für eine Regelstrecke mit motorischem Stellantrieb
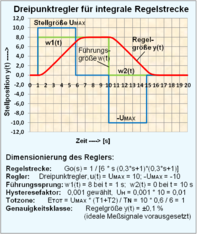
Parameter des Dreipunktreglers sind:
- Hysterese: UH zur Reduzierung der Schaltfrequenz.
- Totzone ±ETOT als Funktion eines kleinen Anteils der Regeldifferenz, bei der die Ausgangsgröße des Reglers u(t) = Null gesteuert wird.
- Stellgrößen UMAX und -UMAX.
- verzögernde Rückführungen uR(t), wenn benötigt.
Einfluss der Hysterese
- Die Hysterese entsteht durch positive Rückkopplung des Signals der Stellgröße u(t) über einen Kopplungsfaktor KH auf den Eingang des Reglers e(t).
- Positiv:

- Negativ:

- Mit steigendem Einfluss der Hysterese reduziert sich die Schaltfrequenz des Regelkreises. Bei integralen Regelstrecken mit Verzögerungen (PT1-Gliedern) hat die Größe der Hysterese keine Bedeutung mehr, weil die Schaltfrequenz durch die Verzögerungen langsam ist. Die Hysterese soll so klein wie möglich gehalten werden.
Verhalten der Totzone
- Die Totzone ±ETOT bezieht sich auf den Bereich eines positiven und negativen Kriteriums des Eingangssignals e(t), bei dem die Ausgangsgröße des Dreipunktreglers u(t) auf den Wert Null gesteuert wird. Es wird von einer symmetrischen Totzone ausgegangen. Die positive und negative Totzone kann in % von der maximalen Regeldifferenz e(t) definiert werden.
- Sind die beiden Kriterien des positiven und negativen Bereichs der Totzone gleich Null, geht das Verhalten des Dreipunktreglers in das eines Zweipunktreglers über.
- An einer idealen integralen Regelstrecke ohne Verzögerungen, ohne Hysterese und ohne Signalrauschen genügt eine extrem kleine Totzone, um eine beliebige Regelgröße schwingungsfrei mit großer Genauigkeit anzusteuern.
- An einer integralen Regelstrecke ohne Verzögerungen wird mit steigender Totzone bei einem positiven Sprung der Führungsgröße w(t) die Stellgröße des Reglers vorzeitig ausgeschaltet. Die Regelgröße erreicht deshalb nicht den Sollwert.
- An einer realen integralen Regelstrecke mit Verzögerungsgliedern (PT1-Glieder) steigt bei einem positiven Sprung der Führungsgröße w(t) die Regelgröße y(t) trotz abgeschalteter Stellgröße weiter an, bis die Speicher der Verzögerungsglieder leer sind.
- Beide Effekte der vorzeitigen Ausschaltung der Regelgröße durch die Totzone und des Nachlaufs der Regelgröße infolge der Energiespeicherung der Verzögerungsglieder können durch eine einfache mathematische Beziehung kompensiert werden.
- Die Größe der Auslegung der Totzone ist von den Zeitkonstanten T der Verzögerungsglieder (PT1-Glieder), der maximalen Stellgröße des Reglers ± UMAX und der Integrationskonstante TN des motorischen Stellantriebs abhängig. Bei mehreren Verzögerungsgliedern werden bei guter Genauigkeit die Zeitkonstanten additiv zusammengefasst.
- Totzone für integrale Regelstrecken mit PT1-Gliedern:

Numerische Berechnung dynamischer Übertragungssysteme (Übersichtsdarstellung)
Relativ einfache Übertragungssystem-Strukturen mit nichtlinearen Elementen sind durch konventionelle Rechenmethoden im kontinuierlichen Zeitbereich nicht mehr geschlossen lösbar. Mit handelsüblichen Personal-Computern kann das Verhalten beliebig vermaschter Systemstrukturen mittels numerischer Berechnung relativ einfach ausgeführt werden.
Kommerzielle Programme
Für die Durchführung der Berechnung von Übertragungssystemen oder der Simulation von Regelkreisen bieten sich käufliche Rechenprogramme an. Mit den bekanntesten Programmen wie MATLAB und Simulink stehen umfangreiche Befehlssätze für die theoretische Modellierung von dynamischen Systemen und vielen speziellen regelungstechnischen Befehlen zur Verfügung.
Alternativ können mit selbst erstellten beliebigen Rechenprogrammen bei Anwendung von Differenzengleichungen in Verbindung mit logischen Operatoren sehr effiziente Regelkreis-Simulationen durchgeführt werden. Dabei sind relativ geringe mathematische Kenntnisse erforderlich.
Vorteile der Simulation von Systemen mit Differenzengleichungen
- Einfache mathematische Anforderungen durch algebraische Operationen
- Behandlung kombinierter LZI-Systeme mit nichtlinearen Systemen
- Eingabe von Anfangswerten möglich
- Darstellung eines Regelkreises als Blockschaltbild mit Eintrag der Differenzengleichung und logischen Operatoren
- Behandlung von mehrschleifigen Systemen (MIMO-Systeme)
- Systembeschreibungen durch Differenzialgleichungen im Zustandsraum in der Darstellungsart der Regelungsnormalform können ebenfalls durch Differenzengleichungen ersetzt werden. Die Berechnung eines Zustandsregelkreises ist relativ einfach, weil nur Integrale gelöst werden müssen.
- Bei tabellarischer Darstellung der einzelnen Berechnungsergebnisse völlige
Durchsicht des inneren System-Bewegungsablaufs des Regelkreises. Bei Anwendung
der Tabellenkalkulation unmittelbare grafische Darstellung der
Rechenergebnisse
 mittels verfügbarer Werkzeuge für die System-Zeitverläufe.
mittels verfügbarer Werkzeuge für die System-Zeitverläufe.
Prinzipielles Verfahren der numerischen Berechnung eines Übertragungssystems
Die Anwendung der numerischen Berechnung eines linearen Übertragungssystems
nach dem Euler-Rechteckverfahren
bezieht sich auf algebraische Operationen mit Differenzengleichungen, die aus
Differenzialgleichungen von linearen Elementarsystemen abgeleitet werden können.
Beliebig vermaschte lineare Systemstrukturen setzen sich maximal aus drei nicht
zerlegbaren Elementarsystemem einer Übertragungsfunktion  im Zähler und Nenner zusammen. Dabei entspricht die Laplace-Variable
der komplexen Frequenz.
im Zähler und Nenner zusammen. Dabei entspricht die Laplace-Variable
der komplexen Frequenz.
Sind die Zahlenwerte der Koeffizienten einer Übertragungsfunktion
in der Polynomdarstellung bekannt, kann mit Hilfe der Nullstellenzerlegung im
Zähler und Nenner der Übertragungsfunktion die faktorielle Darstellung in
Linearfaktoren gewonnen werden. Die Nullstellen  des Zähler- und Nennerpolynoms können in Abhängigkeit von den Zahlenwerten
jeweils den Wert
des Zähler- und Nennerpolynoms können in Abhängigkeit von den Zahlenwerten
jeweils den Wert  ,
(real) oder
,
(real) oder  (konjugiert komplex = Systeme 2. Ordnung) aufweisen. Damit entstehen drei Arten
von Linearfaktoren, die im Zähler und Nenner der Übertragungsfunktion
im Zeitbereich insgesamt 6 spezielle Formen von Verhaltenseigenschaften haben,
die jeweils einfach und mehrfach auftreten können.
(konjugiert komplex = Systeme 2. Ordnung) aufweisen. Damit entstehen drei Arten
von Linearfaktoren, die im Zähler und Nenner der Übertragungsfunktion
im Zeitbereich insgesamt 6 spezielle Formen von Verhaltenseigenschaften haben,
die jeweils einfach und mehrfach auftreten können.
Mit Hilfe der Differenzengleichungen der zugehörigen Übertragungsglieder
erster Ordnung lassen sich alle linearen Systeme höherer Ordnung – auch Systeme
mit konjugiert komplexen Polen – nachbilden. Einfach ist die Nachbildung einer
Differenzengleichung 2. Ordnung durch ein Modell
eines Hilfsregelkreises mit einem PT1-Glied und einem I-Glied. Allgemein kann
eine Differenzengleichung höherer Ordnung aufgestellt werden, deren Differenziale
durch Differenzenquotienten
höherer Ordnung ausgetauscht werden.
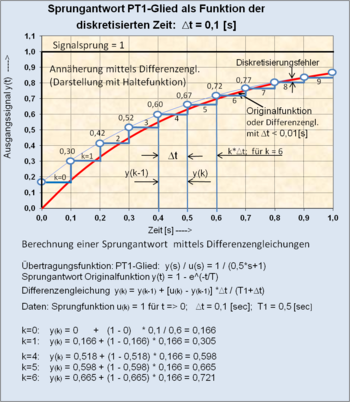
Durch unterschiedliche Verfahren der Approximation
(Annäherung) an eine zeitabhängige Funktion existieren unterschiedliche
Differenzengleichungen für die gleiche Funktion. Das einfachste Verfahren ist
das Euler-Rechteckverfahren. Alle Differenzengleichungen beziehen sich auf das
zu beschreibende dynamische System  .
Die aktuelle Zeit ist
.
Die aktuelle Zeit ist  .
.
Als Folge
wird hier die Auflistung von endlichen fortlaufend nummerierten Zahlen  verstanden.
verstanden.  kann eine beliebige Zahl der Folge sein. Eine Berechnung der Folge
kann eine beliebige Zahl der Folge sein. Eine Berechnung der Folge  ist eine um eine Folge zurückliegende Berechnung. Die Folge
ist der aktuelle Zustand und die Folge
ist eine um eine Folge zurückliegende Berechnung. Die Folge
ist der aktuelle Zustand und die Folge  ist ein künftiger Zustand. Rekursive
Algorithmen der Differenzengleichungen berechnen die Ausgangsgröße eines Systems
immer aus der Ausgangsgröße der Folge
und der aktuellen Folge
für das Zeitintervall
ist ein künftiger Zustand. Rekursive
Algorithmen der Differenzengleichungen berechnen die Ausgangsgröße eines Systems
immer aus der Ausgangsgröße der Folge
und der aktuellen Folge
für das Zeitintervall  .
.
Die verständlichste Darstellungsart der Rechenergebnisse ist tabellarisch.
Alle Zeilen enthalten neben dem zunehmenden Zeitintervall  die gleichen Differenzengleichungen und damit die Rechenergebnisse der
Teilsysteme und des Systemausgangs
die gleichen Differenzengleichungen und damit die Rechenergebnisse der
Teilsysteme und des Systemausgangs  der betreffenden Folge in einer Zeile. Die Spalten einer Zeile enthalten je eine
Differenzengleichung und damit ein Teilergebnis .
Jedes Ausgangssignal
einer Spalte wird zu einem Eingangssignal
der betreffenden Folge in einer Zeile. Die Spalten einer Zeile enthalten je eine
Differenzengleichung und damit ein Teilergebnis .
Jedes Ausgangssignal
einer Spalte wird zu einem Eingangssignal  der folgenden Spalte der gleichen Zeile. Jede Differenzengleichung jeder Spalte
einer Zeile bezieht sich auf die aktuelle Eingangsgröße
der folgenden Spalte der gleichen Zeile. Jede Differenzengleichung jeder Spalte
einer Zeile bezieht sich auf die aktuelle Eingangsgröße  und
und  der vorherigen Zeile.
der vorherigen Zeile.
Differenzengleichungen lassen sich mit jeder Programmiersprache anwenden.
Empfohlen wird die Verwendung der Tabellenkalkulation, weil Programmfehler damit
ausgeschlossen sind und das Zeitverhalten der Ausgangsgröße
(vereinfachte Schreibweise von  )
sowie interner Größen unmittelbar grafisch dargestellt werden können.
)
sowie interner Größen unmittelbar grafisch dargestellt werden können.
Wegen des hohen Bekanntheitsgrades werden diese Übertragungsfunktionen (Linearfaktoren) in Zeitkonstanten-Darstellung mit den nachfolgend dargestellten Differenzengleichungen über die zugehörigen Differenzialgleichungen analogisch in Bezug gebracht.
Zugehörige Differenzengleichungen von Übertragungssystemen G(s) erster Ordnung:
| Elementarsysteme | I-Glied | D-Glied | PD1-Glied | PT1-Glied |
|---|---|---|---|---|
| Übertragungsfunktion |  |
 |
 |

|
| Differenzengleichungen (nach Euler) 
|
 |
![{\displaystyle =[u_{(k)}-u_{(k-1)}]\cdot {\frac {T}{\Delta t}}}](/svg/a5c739a81b824897986be87ecb7e7f74a712af9f.svg) |
![{\displaystyle =K_{PD1}\cdot [u_{(k)}+[u_{(k)}-u_{(k-1)}]\cdot {\frac {T}{\Delta t}}]}](/svg/a5e8013fa68abe744c128b654cd7d737774534cf.svg) |
![{\displaystyle =y_{(k-1)}+[K_{PT1}\cdot u_{(k)}-y_{(k-1)}]\cdot {\frac {\Delta t}{T+\Delta t}}}](/svg/83f1f8a8ae63d4def6148099bc1a4442a2788d6d.svg)
|
(Mit K = Verstärkungsfaktor,
= aktuelle Ausgangsgröße,  = vorherige Ausgangsgröße, T = Zeitkonstante,
= aktuelle Eingangsgröße)
= vorherige Ausgangsgröße, T = Zeitkonstante,
= aktuelle Eingangsgröße)
Nichtlineare Systeme oder Totzeitsysteme können als Tabellenspalte oder durch logische Befehle berücksichtigt werden. Anfangswerte der Übertragungssysteme mit Energiespeichern können nach der Regelungsnormalform der Zustandsraumdarstellung behandelt werden.
Nachfolgend wird ein einfaches Verfahren beschrieben, das zu effizienten Ergebnissen führt und den inneren System-Bewegungsablauf auch komplizierter Regelkreisstrukturen anschaulich darstellt.
Simulationsmodell eines dynamischen Übertragungssystems
Mit der Simulation eines mathematischen Modells eines Übertragungssystems bzw. eines Regelkreises ergibt sich die Möglichkeit, mit geeigneten Testsignalen eine Systemanalyse oder eine Systemoptimierung durchzuführen.
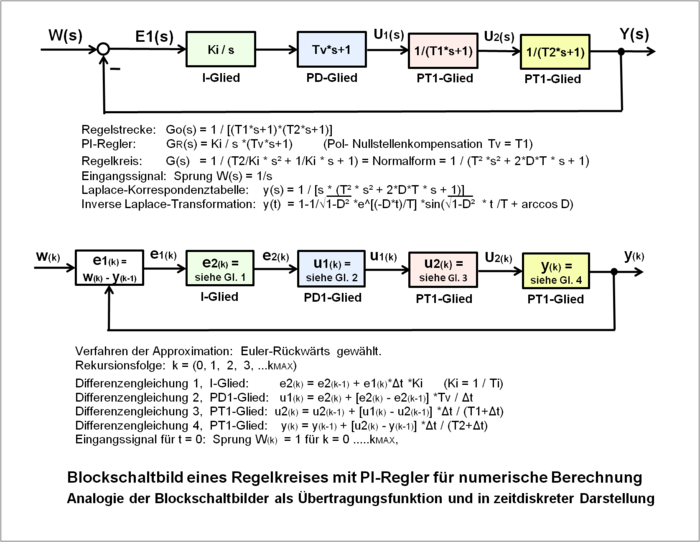
Der Vorteil der Simulation an einem Modell liegt auf der Hand. Es werden keine technischen Anlagen gefährdet, bzw. benötigt, der Zeitfaktor spielt keine Rolle, es können sehr schnelle oder sehr langsame Prozesse optimiert werden. Voraussetzung ist die mathematische Beschreibung eines gut angenäherten Modells der meist technischen Regelstrecke.
Das Modell (Modellbildung) eines Übertragungssystems ist das mathematische Abbild einer meist technischen (evtl. physikalischen, chemischen, biologischen) Einrichtung. Es wird analytisch über Differenzialgleichungen gewonnen oder experimentell durch Identifizierungsverfahren.
Die Modellierung einer bestehenden Hardware-Steuerstrecke oder Regelstrecke im Zeitbereich geschieht experimentell in der einfachsten Form durch eine grafische Aufzeichnung der Sprungantwort mit anschließender Analyse des zeitlichen Verhaltens. (Siehe Experimentelle Systemidentifikation)
Die Modellierung im Frequenzbereich geschieht durch Anregung des Systems durch eine variable Frequenz und Aufzeichnung der Ausgangsamplitude und Phase. Über den Frequenzgang wird die Übertragungsfunktion des Systems gebildet.
Nichtlineare Systeme können weder durch gewöhnliche Differentialgleichungen noch durch Übertragungsfunktionen beschrieben werden. Durch zeitdiskrete Beschreibungen in Form logischer Befehle (z.B. bei Signalbegrenzungen) oder durch eine Tabelle bei einer nichtlinearen Kennlinie ist das relativ einfach möglich.
Erweiterte Regelkreisstrukturen
Dezentrale Regelung

Die dezentrale Regelung ist ein spezieller Ansatz zur Regelung von
Mehrgrößensystemen mit gleicher Anzahl  von Ein- und Ausgängen. Jeder Regelgröße wird ein Eingang zugeordnet, der
möglichst großen Einfluss auf die Regelgröße hat. Für jedes Paar von Ein- und
Ausgängen wird ein Eingrößenregler entworfen und realisiert, insgesamt also
Eingrößen-Regelkreise.
von Ein- und Ausgängen. Jeder Regelgröße wird ein Eingang zugeordnet, der
möglichst großen Einfluss auf die Regelgröße hat. Für jedes Paar von Ein- und
Ausgängen wird ein Eingrößenregler entworfen und realisiert, insgesamt also
Eingrößen-Regelkreise.
Bei der dezentralen Regelung wird also so vorgegangen, als ob die Regelkreise sich gegenseitig nicht beeinflussen würden und ggf. vorhandene Kopplungen von anderen Regelkreisen (im Bild gestrichelt dargestellt) werden jeweils als Störgrößen für einen Regelkreis betrachtet. Das Verfahren funktioniert deshalb besonders gut, wenn die Querkopplungen in der Regelstrecke klein sind. Zu ihrer Bewertung wurden verschiedene Koppelmaße entwickelt. Treten durch die Kopplungen zu große unerwünschte Beeinflussungen der Regelkreise untereinander auf, können spezielle Techniken angewendet werden, um diese zu Kompensieren. Oft wird dabei ein Entkopplungsnetzwerk eingesetzt, das vor die Strecke gesetzt wird, und zusammen mit dieser ein System ohne Querkopplungen erzeugt, für das nun der Ansatz unabhängiger Eingrößen-Regelkreise wirklich zutrifft. Man spricht in diesem Fall von entkoppelter Regelung.
Kaskadenregelung

Für die Kaskadenregelung wird vorausgesetzt, dass die Regelstrecke mit ihren Teilsystemen eine Kettenstruktur aufweist und Eingangsschnittstellen der Regeldifferenz und Ausgangsschnittstellen mit Messeinrichtungen der Hilfsregelgrößen gebildet werden können.
Das Prinzip der Kaskadenregelung besteht in der hierarchischen Ineinanderschachtelung von Regelkreisen. Es werden zunächst Hilfsregelgrößen mit schnellen inneren Regelkreisen geregelt, deren Sollwerte aus den Stellgrößen der äußeren, langsameren Kreise bestehen.
Häufiges Ziel der Kaskadenregelung gegenüber einem Standardregelkreis ist die schnelle Unterdrückung von Störsignalen innerhalb der reaktionsschnellen Streckenteilsysteme, bevor die Störsignale den Ausgang der Gesamtregelstrecke erreichen. Der äußere Regelkreis erhält einen I-Anteil zur Minimierung der statischen Regeldifferenz.
Smith-Prädiktor

Ein Prädiktor nutzt direkt (nicht indirekt wie beim Beobachter) das Wissen des Regelstreckenmodells zur Vorhersage zukünftiger Regelgrößenverläufe. Dies bietet insbesondere Vorteile bei stark totzeitbehafteten Systemen, da konventionelle Regler dann zumeist nur sehr vorsichtig eingestellt werden können. Beispiele für starke Totzeiten finden sich zum Beispiel in der Verfahrenstechnik beim Stofftransport über lange Leitungen. Um eine wesentlich aggressivere Regelung dieser Systeme zu ermöglichen, wurde in den 1950er Jahren der Smith-Prädiktor entwickelt.
Der Smith-Prädiktor macht durch ein im Regler enthaltenes Parallelmodell eine
Vorhersage  über den zukünftigen Regelgrößenverlauf. Für diese Aufgabenstellung werden der
totzeitbehaftete und der totzeitfreie Teil getrennt betrachtet. Der Regler wird
dann nicht an der eigentlichen Regelgröße
über den zukünftigen Regelgrößenverlauf. Für diese Aufgabenstellung werden der
totzeitbehaftete und der totzeitfreie Teil getrennt betrachtet. Der Regler wird
dann nicht an der eigentlichen Regelgröße  ,
sondern an der Vorhersage ohne Totzeit
eingestellt. Dadurch kann der Regler wesentlich aggressiver eingestellt werden.
Bis zu dieser Stelle handelt es sich um eine Steuerung;
um eine Anpassung auf Modellfehler
und Störgrößen und damit zu einer Regelung zu ermöglichen, wird der
Vorhersagewert
,
sondern an der Vorhersage ohne Totzeit
eingestellt. Dadurch kann der Regler wesentlich aggressiver eingestellt werden.
Bis zu dieser Stelle handelt es sich um eine Steuerung;
um eine Anpassung auf Modellfehler
und Störgrößen und damit zu einer Regelung zu ermöglichen, wird der
Vorhersagewert  mit dem realen Wert verglichen und geht so in die Regelung mit ein. Wenn
das Regelstreckenmodell mit der Regelstrecke gut übereinstimmt, kann durch den
Regelkreis mit Smith-Prädiktor extrem gutes Führungsverhalten erzielt werden,
weil der Steuergrößenverlauf so bestimmt wird, als ob keine Totzeit vorhanden
wäre. Das Störverhalten ist prinzipiell schlechter, da kein a-priori-Wissen über
die Störgröße benutzt werden kann.
mit dem realen Wert verglichen und geht so in die Regelung mit ein. Wenn
das Regelstreckenmodell mit der Regelstrecke gut übereinstimmt, kann durch den
Regelkreis mit Smith-Prädiktor extrem gutes Führungsverhalten erzielt werden,
weil der Steuergrößenverlauf so bestimmt wird, als ob keine Totzeit vorhanden
wäre. Das Störverhalten ist prinzipiell schlechter, da kein a-priori-Wissen über
die Störgröße benutzt werden kann.
Der Regelkreis mit Smith-Prädiktor ist allerdings wenig robust gegenüber Fehlern im Regelstreckenmodell, insbesondere gegenüber Fehlern in der Totzeit. Das schränkt seine Verwendung stark ein, da in der Praxis meist davon ausgegangen werden muss, dass die Regelstreckenparameter eine relativ große Ungenauigkeit im Verlauf der Lebensdauer des Regelkreises aufweisen werden (z.B. durch Alterung, andere Umweltbedingungen etc.). Durch die fehlende Nachführung des Modellzustands an den Streckenzustand können sich bei nichtlinearen Strecken weitere Probleme ergeben, da durch das Auftreten von Störungen der Streckenzustand und der Modellzustand auseinanderlaufen können und sich das Streckenmodell dann an einem anderen Arbeitspunkt als die Strecke befindet. Ein weiterer Nachteil des Smith-Prädiktors besteht darin, dass er nur an stabilen Regelstrecken eingesetzt werden kann.[9]
Mit fortschreitender Geschwindigkeit von Computern wird es für immer schneller ablaufende Prozesse möglich, Simulationen und in Echtzeit stattfindende Modelladaptionen und Optimierungen durchzuführen, wodurch sich eine Reihe verschiedener Modellprädiktiver Regelverfahren, wie z.B. Model Predictive Control, insbesondere in der Chemischen Industrie weit etabliert haben.
Split-Range Regelung
Die Split-Range Regelung betrifft die Realisierung einer Stellgröße durch mehrere Aktoren mit beschränktem Wirkbereich. Beispielsweise werden zur Temperaturregelung in einem Batch-Reaktor sowohl eine elektrische Heizung als auch eine von einem Kühlmedium durchflossene Kühlschlange eingesetzt. Ein positives Stellsignal ist durch die Ansteuerung der Heizkerzen zu realisieren. Ein negatives Stellsignal hingegen bedeutet die Anforderung von Kühlung, sodass die Heizung auszuschalten und stattdessen ein Ventil zu öffnen ist, um das Kühlmedium freizugeben.
Störgrößenaufschaltung
Normalerweise sind Störungen ihrer Natur gemäß unbekannt. Liegt jedoch eine Messung oder Schätzung der Störung vor, so kann diese durch Aufschaltung im Regelkreis verwendet werden, um die Störunterdrückung zu verbessern.
Ein Beispiel für messbare Störungen ist die Außentemperatur in Raumtemperatur-Regelungen. Sie wird in Heizungen zur Anpassung der Vorlauftemperatur eingesetzt.
Eine Möglichkeit zur Schätzung von Störungen ist der Einsatz eines Störgrößenbeobachters.
Vorsteuerung und Vorfilter
Vorsteuerung
Einschleifige Standardregelkreise erlauben eine Optimierung des Verhaltens der Regelgröße entweder für das Führungs- oder Störverhalten. Diese Eigenschaft bezeichnet man mit einem „Freiheitsgrad“.
Durch Änderung der Regelkreisstruktur kann man beim Systementwurf z.B. durch eine Vorsteuerung oder einen Vorfilter eine Unabhängigkeit des Führungs- und Störverhaltens erreichen. Diese Eigenschaft bezeichnet man als einen Regelkreis mit zwei Freiheitsgraden.
Ein Regelkreis mit einer Vorsteuerung erlaubt die Verbesserung des Führungsverhaltens mit folgenden Eigenschaften:
- Die Vorsteuerung beeinflusst nicht das Störverhalten.
- Sie hat keinen Einfluss auf die Kreisverstärkung und gefährdet damit nicht die Stabilität des Regelkreises.
- Die Vorsteuerung als Pole-Nullstellenkompensation der Regelstrecke hat in der Praxis nur Modellcharakter. Die Realisierung ist schwierig, weil die erforderlichen Differenzierglieder bei der Analog-Hardware-Lösung parasitäre Verzögerungen benötigt, bei der digitalen Software-Lösung sich sehr hohe Stellamplituden bilden. Beide Verfahren reduzieren den gewünschten Effekt. Abhilfe: Umrechnung in einen Vorfilter oder Aufteilen der Regelstrecke in mehrere Regelkreise (z.B. Kaskadenregelung).
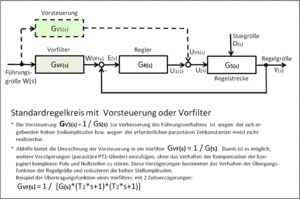
Übertragungsfunktion der Vorsteuerung mit Gs(s) als Funktion der Regelstrecke:

Das Übertragungsverhalten der Vorsteuerung entspricht also dem Reziprokwert der Übertragungsfunktion der Regelstrecke. Sie wird gespeist durch die Führungsgröße W(s) und greift mit Uvs(s) additiv auf den Eingang der Regelstrecke U(s) ein, ohne das Störverhalten zu verändern.
Der Realisierung der Vorsteuerung sind Grenzen gesetzt, um das Übertragungsverhalten der Vorsteuerung mit der Regelstrecke zum Faktor 1 zu kompensieren.
- Die Vorsteuerung einer Regelstrecke mit z.B. 3 PT1-Gliedern erfordert ein Vorfilter mit 3 PD-Gliedern.
- Eine dreifache Differenzierung der Führungsgröße W führt zu sehr hohen Stellgrößen und damit zu unvermeidbaren Begrenzungseffekten, welche der gewünschten Wirkung entgegenstehen.
- Zusätzliche kleine Verzögerungsglieder in der Vorsteuerung verschlechtern die gewünschte Wirkung erheblich. Damit fällt die Realisierung von PD-Gliedern mit analogen Verfahren wegen der unvermeidlichen parasitären Zeitkonstanten aus.
Abhilfe bietet die Umrechnung der Vorsteuerung in einen Vorfilter mit der
Wirkung gleicher dynamischer Eigenschaften auf den Regelkreis. Anstelle der
Vorsteuerung wird ein Vorfilter vor dem Regelkreis eingesetzt, welches durch die
Führungsgröße  gespeist wird. Das Vorfilter erhält die Invertierung der Übertragungsfunktion
des geschlossenen Regelkreises (ohne Vorsteuerung).
gespeist wird. Das Vorfilter erhält die Invertierung der Übertragungsfunktion
des geschlossenen Regelkreises (ohne Vorsteuerung).
Vorfilter
Unter einem Vorfilter versteht man einen Funktionsblock mit der Übertragungsfunktion:

Der Filter liegt vor einem Regelkreis und wird von der Führungsgröße  gespeist. Weitere einheitliche Definitionen gibt es nicht.
gespeist. Weitere einheitliche Definitionen gibt es nicht.
Vorfilter können folgende Funktionen aufweisen:
- Als Korrekturfaktor für einen Regelkreis ohne I-Anteil bei Festwertregelungen. Korrigiert wird die bleibende statische Regeldifferenz.
- Zur Vermeidung von Sollwertsprüngen können Verzögerungsglieder (PT1-Glied) oder lineare Anstiegsbegrenzungen eingesetzt werden.
- Bei Regelungen mit Stellgliedern mit nichtlinearem Verhalten können angenäherte Linearisierungen vorgenommen werden.
- Vorfilter für Solltrajektorien erlauben eine dynamische Anpassung der zeitgesteuerten Führungsgröße auf das Führungsverhalten des Regelkreises bezüglich minimaler Folgefehler.
- Vorfilter für die stationäre Regelgenauigkeit bei Zustandsreglern.
- Vorfilter beinhalten die Funktion der Vorsteuerung zur Verbesserung des Führungsverhaltens bei optimiertem Störverhalten.
Allgemein gilt: Mit einem Vorfilter können bei einschleifigen Regelkreisen beliebige Pole, konjugiert komplexe Polpaare oder Nullstellen des Regelkreises (ohne Vorfilter) kompensiert werden.
Umrechnung des Verhaltens einer Vorsteuerung zu einem Vorfilter
Die Übertragungsfunktion der Vorsteuerung lautet für den idealen Fall:

als Invertierung der Regelstrecke. Das Produkt aus Vorsteuerung und Regelstrecke kompensiert sich zu 1.

Die Umrechnung der Übertragungsfunktion der Vorsteuerung GVS(s) für das gleiche Verhalten des Vorfilters GVF(s) errechnet sich wie folgt:

Diese Beziehung ist die Invertierung der Übertragungsfunktion des geschlossenen Regelkreises. Liegt der Vorfilter vor dem Regelkreis und wird der Filter von der Führungsgröße W gespeist, dann ist das Führungsverhalten des Regelkreises theoretisch unendlich schnell.
Dieses Verhalten ist leicht zu verstehen, weil es sich um eine Pole-Nullstellenkompensation handelt. Die Übertragungsfunktion des Regelkreises enthält bei Optimierung des Störverhaltens immer PT2-Glieder mit konjugiert komplexen Polen. Um diese zu kompensieren, ist ein PD2-Glied mit konjugiert komplexen Nullstellen erforderlich. Es gilt allgemein für einen Regelkreis oder eine Steuerstrecke, das Verhalten eines Schwingungsgliedes (PT2-Glied) kann durch ein PD2-Glied mit konjugiert komplexen Nullstellen vollständig kompensiert werden, wenn die Parameter beider Systeme identisch sind.
PD2-Glieder mit konjugiert komplexen Nullstellen erhält man, indem von der Übertragungsfunktion eines PD2-Gliedes den mittleren Term der Übertragungsfunktion durch ein bestimmtes D-Glied subtrahiert.

Diese Übertragungsfunktion kann per Hardware oder Software realisiert werden.
Weitere Informationen zur Realisierung eines PD2-Gliedes mit konjugiert komplexen Polen siehe Artikel „Regler“ .
Vorteile des Vorfilters gegenüber einer Vorsteuerung:
- Pole-Nullstellenkompensation: Das Produkt der Übertragungsfunktionen des Vorfilters und Regelkreises wirkt als Pole-Nullstellenkompensation. Es können ohne Einschränkungen Verzögerungsglieder (parasitäre PT1-Glieder) hinzugefügt werden, die das Übergangsverhalten der Regelgröße bestimmen, ohne auf die Kompensation der konjugiert komplexen Pole und Nullstellen Einfluss zu nehmen.
- Übertragungsfunktion des Produktes Vorfilter und Regelkreis:

- Normale Stellamplituden: Mit steigender Größe der Verzögerungsglieder reduzieren sich hohe Stellamplituden auf Normalwerte.
- Weniger PD-Glieder: Durch geeignete Wahl des Reglers kann die Ordnung der Übertragungsfunktion des Regelkreises um eine Ordnung gegenüber der Regelstrecke reduziert werden.
- Schwingungsglied mit Totzeit: Eine Kompensation des Schwingungsgliedes eines Regelkreises mit einem PD2-Glied in dem Vorfilter ist auch möglich, wenn der Regelkreis eine Totzeit enthält. Die Totzeit kann auf diese Weise nicht kompensiert werden.
Beispiele von Regelkreisen außerhalb der Technik
Den Begriff des Regelkreises gebraucht man außer in der Technik auch in der Biologie, vor allem in der Zoologie, um physiologische Abläufe übersichtlich darzustellen. Als Beispiel der Regelung solcher Funktionen sei die Homoiostase des Hormonsystems genannt, die sich an der Regulation des Blutzuckerspiegels durch das Hormon Insulin besonders eindrücklich demonstrieren lässt. Es handelt sich demnach um ein nicht nur rein technisches Modell, sondern um ein allgemeines Organisationsprinzip, das auch unter Begriffen wie Selbstregulation und Systemtheorie zu verstehen ist.
Biologische Regelkreise

In der Biologie findet man eine Vielzahl an Regelkreisen sowohl relativ einfache als auch komplexere auf physiologischer Ebene innerhalb der Organsysteme von höheren Lebewesen, die zu ihrer Homöostase beitragen, bis hin zu den hochkomplexen Regelkreisen innerhalb von Lebensgemeinschaften auf der Ebene der Ökologie. Beispiele:
- Endprodukthemmung bei der Synthese von Aminosäuren innerhalb von Zellen und Geweben.
- Regulierung des Wasserhaushaltes bei Pflanzen
- Regulation der Atmung (ein auf Chemorezeptoren beruhender humoraler Regelkreis)
- Regulierung des Sauerstoffgehaltes des Blutes
- Thermoregulation: Gleichwarme Tiere benötigen zum Überleben eine bestimmte Körpertemperatur, die in einem Toleranzband variiert, dieses aber nicht verlassen sollte. Das Nervensystem von jedem gleichwarmen Tier beinhaltet daher einen Temperatur-Regelkreis mit entsprechenden Rezeptoren als Sensoren, und Schweißdrüsen sowie Muskeln als Stelleinrichtungen.
- Regulierung des Wasserhaushaltes und des Säure-Basen-Haushalts durch die Niere
- Puls-Regulierung: Zur ausreichenden Versorgung der Zellen mit Sauerstoff und Energie ist eine ausreichende Blutzirkulation erforderlich, die von der körperlichen Belastung abhängt. Dafür sorgt u.a. die Regulation der Herzfrequenz durch das vegetative Nervensystem.
- Blutdruck-Regulation: Bei zu niedrigem Blutdruck ist keine ausreichende Blutzirkulation und Versorgung der Zellen mit Sauerstoff und Energie möglich. Ein zu hoher Blutdruck schädigt die Organe. Deshalb gibt es bei Tieren und Menschen eine Blutdruckregulation.
- Regulierung der Menge des einfallenden Lichtes ins Auge durch Vergrößerung bzw. Verkleinerung der Pupille sowie die Adaption anderer Sinnesorgane (Weber-Fechner-Gesetz).
- Regulierung des Blutspiegels zahlreicher Hormone (z.B. im thyreotropen Regelkreis)
- Regulation der Nahrungsaufnahme durch Hunger und Sättigung
- Regulation des Blutzuckerspiegels: Der Blutzucker stellt die Energieversorgung des Organismus sicher und wird der körperlichen Belastung angepasst.
- Regulierung der Populationsdichte durch Räuber-Beute-Beziehungen
Qualitätskreis
Aus dem Bereich des Qualitätsmanagements gibt es den Qualitätskreis, darauf basieren Qualitätsmanagementsysteme gemäß dem Regelwerk DIN EN 9001:2015.
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 28.05. 2026