Nichtlineares System
Nichtlineare Systeme (NL-Systeme) sind Systeme der Systemtheorie, deren Ausgangssignal nicht immer proportional zum Eingangssignal (Systemreiz) ist. Sie können wesentlich komplexer sein als lineare Systeme.
Allgemeine Grundlagen
Für nichtlineare Systeme gilt, im Gegensatz zu linearen Systemen, das Superpositionsprinzip nicht. Das heißt, man kann nicht von mehreren bekannten Systemreiz-Systemantwort-Paaren auf eine unbekannte Systemantwort zu gegebenem Systemreiz schließen. Ferner unterscheidet man die Nichtlinearität eines Systems in statische, dynamische, einwertige und mehrwertige Nichtlinearität. Da es zu nichtlinearen Systemen keine geschlossene mathematische Theorie gibt, gibt es auch keine allgemeine Methode zur Analyse unbekannter nichtlinearer Systeme.
Allgemein kann man ein mathematisches Modell eines nichtlinearen Systems mit
innerem Zustand  ,
äußeren Einflüssen
,
äußeren Einflüssen  und Beobachtungen
und Beobachtungen  darstellen als
darstellen als

wobei  und
und  die das System beschreibenden, nichtlinearen Funktionen sind.
die das System beschreibenden, nichtlinearen Funktionen sind.
Statische nichtlineare Systeme
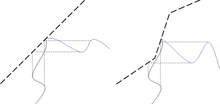
Unter statischen nichtlinearen Systemen versteht man solche, die ohne Zeitverzögerung auf einen Systemreiz reagieren. Zum Beispiel wird die Diode im Allgemeinen (Ausnahme etwa bei schnellen Schaltvorgängen) als statisches Bauteil angesehen. Ihre Spannung-Strom-Kennlinie folgt einer Exponentialfunktion; sie wird in verschiedenen Anwendungen idealisiert als stückweise linear behandelt, bleibt aber im systemtheoretischen Sinne nichtlinear. Statische Systeme können durch eine statische Kennlinie beschrieben werden, wie sie in den Abbildungen gezeigt werden.
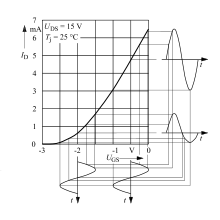
Oben (so etwa bei > 3 mA) fast linear: Ein sinusförmiger Verlauf einer Änderung ΔUGS erzeugt eine Änderung ΔID ohne sichtbare Abweichung vom Sinusverlauf.
Unten (so etwa bei < 3 mA) nicht linear: Ein sinusförmiger Verlauf einer Änderung ΔUGS erzeugt eine Änderung ΔID mit erkennbar nicht sinusförmigem Verlauf.
Dynamische nichtlineare Systeme
Unter dynamischen nichtlinearen Systemen versteht man solche, die auch Speicherelemente und damit ein „Gedächtnis“ besitzen. Dadurch wird die Systemantwort nicht vom augenblicklichen Wert des Systemreizes allein bestimmt. Sie hängt auch von der Vorgeschichte, also von der Stärke der vorangehenden Erregung ab.
Charakterisierung nichtlinearer Systeme bezüglich ihres Frequenzverhaltens
Bei Erregung linearer Systeme mit einem Sinus-Signal erhält man am Ausgang wiederum ein sinusförmiges Signal derselben Frequenz, jedoch mit veränderter Phasenlage und Amplitude. Diese Eigenschaft weisen nichtlineare Systeme im Allgemeinen nicht auf. Nichtlineare Systeme können an ihrem Systemausgang Frequenzanteile aufweisen, welche im Eingangssignal nicht enthalten sind (Verzerrung).
Beispiele aus der Elektrotechnik sind:
- Wenn ein nichtlinearer Verstärker mit einer einzigen Sinusspannung als Eingangsspannung gespeist wird, erzeugt er am Ausgang neben einer Sinusspannung zusätzlich Harmonische. Deren Anteile werden mit zunehmender Übersteuerung größer.
- Wenn der Verstärker mit einer Überlagerung zweier oder mehrerer Sinusspannungen unterschiedlicher Frequenz gespeist wird, tritt zusätzlich Intermodulation auf, und es entstehen Kombinationsfrequenzen.
- Sollen mehrere modulierte Wechselspannungen gleichzeitig verstärkt werden, kann es zu Kreuzmodulation kommen. Dann übernimmt eine Wechselspannung teilweise die Modulation der anderen (Luxemburgeffekt).
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 26.05. 2022