Totzeit (Regelungstechnik)
Als Totzeit (auch Laufzeit oder Transportzeit genannt) wird in der Regelungstechnik die Zeitspanne zwischen der Signaländerung am Systemeingang und der Signalantwort am Systemausgang einer Regelstrecke bezeichnet. Jede Änderung des Eingangssignals ruft eine um die Totzeit verzögerte Änderung des Ausgangssignals hervor. Ein System mit Totzeit ohne zusätzliches Zeitverhalten wird auch als Totzeitglied bezeichnet.
Totzeitglieder lassen sich nicht mit gewöhnlichen Differentialgleichungen, sondern nur über das Frequenzverhalten als transzendente Funktionen (nicht algebraisch) beschreiben. Damit erschweren sie die Parametrierung eines Reglers im Regelkreis, weil sich transzendente Funktionen nicht mit gebrochen rationalen Funktionen eines Übertragungssystems zur algebraischen Berechnung kombinieren lassen. Es kann deshalb sinnvoll sein, je nach verwendeter Programmiersprache Totzeitmodelle zu bestimmen, die näherungsweise als gebrochen rationale Funktionen geschrieben werden können.
Die Untersuchung des Frequenzverhaltens von unterschiedlichen linearen Übertragungssystemen mit einem Totzeitglied bei Anwendung des Bode-Diagramms oder der Ortskurve des Frequenzgangs am aufgeschnittenen Regelkreis dient
- der Erkennung der Stabilität des geschlossenen Regelkreises,
- der Systemanalyse von linearen dynamischen Übertragungsgliedern G(s) und Totzeitverhalten.
Die Darstellung des Übertragungsverhaltens im Zeitbereich von Totzeitgliedern
in Verbindung mit linearen und nichtlinearen Übertragungsgliedern im Regelkreis
kann zu einem vernünftigen Berechnungsaufwand nur mit der numerischen
Mathematik erreicht werden. Dabei werden in Abhängigkeit von einem gegebenen
Eingangssignal Wertefolgen im zeitdiskreten Abstand  berechnet. In einer Grafik lässt sich so ein geschlossenes Zeitverhalten für die
Ausgangsgröße
berechnet. In einer Grafik lässt sich so ein geschlossenes Zeitverhalten für die
Ausgangsgröße  und interessierende Zwischengrößen darstellen.
und interessierende Zwischengrößen darstellen.
Grundlagen Totzeitglieder
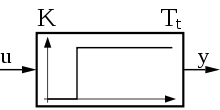
Das Totzeitglied ist ein in der Praxis häufig vorkommendes Übertragungsglied und wirkt meist in Verbindung mit weiteren Verzögerungsgliedern. Es wird durch reine Laufzeit bzw. Transportzeit (Förderband, Rohrleitung) oder bei großen Entfernungen entstehende Signallaufzeiten verursacht. Es verhält sich wie ein P-Glied, dessen Ausgangsgröße verspätet um die Totzeit ankommt, ohne die Eingangsgröße während dieser Zeit zu verzerren. Jede Änderung der Eingangsgröße wirkt um die Totzeit verspätet am Ausgang.
Das Totzeitglied wird nur durch einen Parameter  beschrieben. Die Phasenverschiebung
der Ausgangsgröße zur Eingangsgröße ist proportional der Totzeit und wächst mit
dem Produkt
beschrieben. Die Phasenverschiebung
der Ausgangsgröße zur Eingangsgröße ist proportional der Totzeit und wächst mit
dem Produkt  mit steigender Frequenz.
mit steigender Frequenz.
Während Verzögerungsglieder (PT1-Glied) mit steigender Frequenz des Eingangssignals maximal -90° Phasenverschiebung verursachen können, nimmt die Phasenverschiebung bei Totzeitgliedern mit steigender Frequenz ständig zu. Für einen geschlossenen Regelkreis kann diese Phasenverschiebung frühzeitig zu einer Instabilität führen, weil in Abhängigkeit von der Kreisverstärkung die Rückführung der Regelgröße sich von der Gegenkopplung in eine Mitkopplung wandeln kann.
Totzeitglieder sind Nichtphasenminimumsysteme. Ein lineares dynamisches System ist phasenminimal, wenn seine Pole und Nullstellen in der linken s-Halbebene liegen und es keine Totzeit aufweist.
Die Übertragungsfunktion eines linearen dynamischen Systems wird definiert als Quotient der Laplacetransformierten der Ausgangsgröße Y(s) und der Eingangsgröße U(s):

Lineare dynamische Übertragungsglieder werden in der Regelungstechnik durch
gebrochen rationale Funktionen im Bildbereich (s-Bereich)  beschrieben. Die unabhängige Variable
beschrieben. Die unabhängige Variable  erlaubt beliebige algebraische Operationen im s-Bereich, ist aber nur ein Symbol
für eine vollzogene Laplace-Transformation und enthält keinen Zahlenwert.
Zahlenwerte entstehen aus den Koeffizienten a und b der Übertragungsfunktion in
Polynomdarstellung, indem die Polynome der Übertragungsfunktion durch
Nullstellenzerlegung in Linearfaktoren
(Produkte) zerlegt werden.
erlaubt beliebige algebraische Operationen im s-Bereich, ist aber nur ein Symbol
für eine vollzogene Laplace-Transformation und enthält keinen Zahlenwert.
Zahlenwerte entstehen aus den Koeffizienten a und b der Übertragungsfunktion in
Polynomdarstellung, indem die Polynome der Übertragungsfunktion durch
Nullstellenzerlegung in Linearfaktoren
(Produkte) zerlegt werden.
Beispiel einer Übertragungsfunktion 3. Grades eines linearen dynamischen Systems in Zeitkonstanten-Darstellung:

Ist in dem System noch ein Totzeitglied  vorhanden, kann dies als transzendente Funktion multiplikativ der gebrochen
rationalen Funktion
vorhanden, kann dies als transzendente Funktion multiplikativ der gebrochen
rationalen Funktion  angehängt werden.
angehängt werden.

Im Zeitbereich interessiert das Verhalten der Ausgangsgröße eines Systems für ein gegebenes Eingangssignal. Transzendente Systeme gestalten sich für verschiedene Verfahren der Reglerauslegung ungünstig. Sie können nicht wie gebrochen rationale Systeme algebraisch im s-Bereich behandelt werden.
Derartige als Reihenschaltung zusammengesetzte Systeme können für die
Darstellung im Zeitbereich für den Teil der gebrochen rationalen Funktion mit
verschiedenen Methoden berechnet werden. Die Totzeitfunktion mit
wird der berechneten Zeitfunktion grafisch additiv zugeschlagen. Dies gilt nicht
für den geschlossenen Regelkreis mit einem Totzeitglied in der Regelstrecke.
Frequenzverhalten des Totzeitgliedes
Im Gegensatz zu den linearen dynamischen Systemen kann ein Totzeitglied nicht
mit einer gewöhnlichen Differentialgleichung
beschrieben werden. Einen einfacheren Zusammenhang des Ein- Ausgangsverhaltens
ergibt sich im Bildbereich als Übertragungsfunktion .
Die Funktionalbeziehung eines Totzeitgliedes im Zeitbereich lautet:

Das Eingangssignal erscheint um die Totzeit verzögert unverändert am Ausgang. Daraus ergibt sich die Übertragungsfunktion im Bildbereich:

Die Sprungantwort ergibt sich zu:

Zur Berechnung der Phasenverschiebung wird die Übertragungsfunktion
auf der imaginären Achse des Bildbereichs (welche dem Frequenzverhalten
entspricht) betrachtet.

Der Phasenwinkel kann jetzt direkt abgelesen werden (siehe hierzu auch Eulersche Identität).
Mit  ergibt sich daraus die Phasenverschiebung in Abhängigkeit von der Frequenz:
ergibt sich daraus die Phasenverschiebung in Abhängigkeit von der Frequenz:

Ein reines Totzeitglied hat die Verstärkung 1 bzw. die Dämpfung D = 0 [dB].
Die Phasenverschiebung zwischen Eingangssignal  und Ausgangssignal
erhöht sich bei steigender Frequenz nacheilend um
und Ausgangssignal
erhöht sich bei steigender Frequenz nacheilend um  , also proportional zur Frequenz.
, also proportional zur Frequenz.
Mit steigender Totzeit als Parameter wird ein Regelkreis instabil, was zur Reduzierung der Kreisverstärkung zwingt. Damit wird der Regelkreis träge gegenüber Führungsgrößenänderungen und Störgrößeneinflüssen.
Stabilitätsbetrachtung eines aufgeschnittenen Regelkreises für Systeme mit Totzeit
Die klassische Darstellung eines dynamischen Systems mit Totzeit ist das
Bode-Diagramm und die Ortskurve des Frequenzgangs. Beide grafischen Verfahren
eignen sich zur Stabilitätsbestimmung mittels eines aufgeschnittenen
Regelkreises für den geschlossenen Regelkreis. Die Übertragungsfunktion
mit  kann jederzeit ohne Informationsverlust in den Frequenzgang
kann jederzeit ohne Informationsverlust in den Frequenzgang  oder
oder  übertragen werden.
übertragen werden.
 und
und  .
.Stabilitätsbedingung im Bode-Diagramm mit dem vereinfachten Stabilitätskriterium von Nyquist
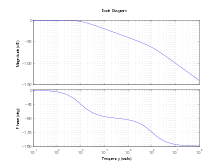
Beim Bode-Diagramm werden Betrag und Phasenwinkel in zwei getrennten Diagrammen aufgetragen, als Amplitudengang und Phasengang. Das Bode-Diagramm hat einen logarithmischen Maßstab. Beim Amplitudengang (doppelt logarithmisch) ist der Betrag F(jω) auf der Ordinate, die Kreisfrequenz ω auf der Abszisse aufgetragen. Beim Phasengang ist der Phasenwinkel (linear) auf der Ordinate, die Kreisfrequenz ω auf der Abszisse (logarithmisch) aufgetragen.
Die Vorteile dieses Verfahrens sind das unmittelbare Einzeichnen der Asymptoten als Geraden des Amplitudengangs, die bequeme Multiplikation durch logarithmische Addition, das direkte Ablesen der Zeitkonstanten und das schnelle Erkennen der Stabilität des geschlossenen Regelkreises. Bei phasenminimalen Systemen ist der Phasengang aus dem Amplitudengang berechenbar und braucht nicht unbedingt gezeichnet zu werden. Dies gilt nicht für Systeme mit einem Totzeitglied.
Frequenzverhalten von Regelkreisgliedern:
- Ein PT1-Verzögerungsglied zeigt beim Amplitudengang mit steigender
Frequenz
 ab der Eckfrequenz (Schnittpunkt der Asymptoten) ein um 45 ° abfallendes
Amplitudenverhältnis. Der Phasengang des sinusförmigen Ausgangssignals ist
gegenüber dem sinusförmigen Eingangssignal nacheilend um maximal φ = -90 °
verschoben.
ab der Eckfrequenz (Schnittpunkt der Asymptoten) ein um 45 ° abfallendes
Amplitudenverhältnis. Der Phasengang des sinusförmigen Ausgangssignals ist
gegenüber dem sinusförmigen Eingangssignal nacheilend um maximal φ = -90 °
verschoben. - Ein PD1-Glied zeigen beim Amplitudengang mit steigender Frequenz
ab der Eckfrequenz ein um 45 ° steigendes Amplitudenverhältnis. Der Phasengang
des sinusförmigen Ausgangssignals ist gegenüber dem sinusförmigen
Eingangssignal voreilend um maximal φ = 90 ° verschoben.
- Ein I-Glied zeigt beim
Amplitudengang mit steigender Frequenz
eine linear mit φ = 45 ° abfallende gerade Linie als Amplitudenverhältnis. Ein
I-Glied zeigt beim Phasengang mit steigender Frequenz eine zunehmend auf φ =
-90 ° nacheilende Phasenverschiebung.
- Ein Totzeitglied zeigt beim Amplitudengang mit steigender Frequenz
immer das Amplitudenverhältnis mit der Verstärkung 1. Der Phasengang des
Totzeitgliedes steigt proportional mit der Frequenz
nacheilend bis ins Unendliche.
Das Stabilitätskriterium ist aus dem Stabilitätskriterium von Nyquist abgeleitet:
Ein geschlossener Regelkreis ist stabil, wenn die nacheilende Phasenverschiebung φ vom Ausgangs- zum Eingangssignal des offenen Kreises bei der Kreisverstärkung K = 1 und φ > −180° beträgt. Die Dämpfung des geschlossenen Kreises wird umso günstiger, je größer der Phasenabstand zu der −180° -Linie beträgt. Dieser Abstand, der oberhalb der – 180°-Linie liegt, nennt man Phasenrand oder auch Phasenreserve und sollte bei etwa 50° ±10° liegen.
Anmerkung: Ist der Amplitudengang auf der Ordinate in dB (Dezibel) aufgetragen, entspricht 0 dB dem Amplitudenverhältnis 1. Der Wert 20 dB entspricht dem Amplitudenverhältnis 10.

Stabilitätsbedingung mit der Ortskurve des Frequenzgangs
Der Frequenzgang
ist eine komplexe Größe und wird zur grafischen Darstellung in Realteil  und Imaginärteil
und Imaginärteil  getrennt.
getrennt.
Die Frequenzganggleichung (Frequenzgang) des aufgeschnittenen Regelkreises wird nach Realteil und Imaginärteil aufgelöst und in ein Koordinatensystem eingetragen. Die senkrechte Achse zeigt die Daten der Imaginärteile, die waagerechten Achse die Realteile. Nach Nyquist lautet die Stabilitätsbedingung:
Wird beim Durchlaufen der Ortskurve
des aufgeschnittenen Regelkreises  in Richtung steigender Werte von
der kritische Punkt (-1; j0) auf der linken (negativen) Seite der Achse der
Realteile nicht umschlungen bzw. berührt, ist der geschlossene Regelkreis
stabil. Aus praktischen Erwägungen sollte der kritische Punkt (-1; j0) auf
(-0,5; j0) verlegt werden, um eine gewisse Stabilitätsreserve zu erzielen.
in Richtung steigender Werte von
der kritische Punkt (-1; j0) auf der linken (negativen) Seite der Achse der
Realteile nicht umschlungen bzw. berührt, ist der geschlossene Regelkreis
stabil. Aus praktischen Erwägungen sollte der kritische Punkt (-1; j0) auf
(-0,5; j0) verlegt werden, um eine gewisse Stabilitätsreserve zu erzielen.
Die in der Abbildung dargestellte Ortskurve des Frequenzgangs eines Beispiels für den aufgeschnittenen Regelkreis:

zeigt laut Abstand von dem kritischen Punkt (-1; j0) der Abszisse des
Realteils von 0,5 einen stabilen geschlossenen Regelkreis. Die P-Verstärkung
 ist auf der Abszisse direkt ablesbar und entspricht dem Abstand der Punkte
ist auf der Abszisse direkt ablesbar und entspricht dem Abstand der Punkte  .
.
Anmerkung: Die Ortskurve für ein einzelnes Totzeitglied macht im
s-Diagramm mit steigender Frequenz unendlich viele Umläufe auf einer Kreisbahn
mit dem Radius  .
Die Reihenschaltung eines Totzeitgliedes mit einem PT1-Glied (Halbkreis im 4.
Quadranten) ergibt durch Addition der beiden Ortskurven den spiralförmigen
Verlauf.
.
Die Reihenschaltung eines Totzeitgliedes mit einem PT1-Glied (Halbkreis im 4.
Quadranten) ergibt durch Addition der beiden Ortskurven den spiralförmigen
Verlauf.
Grundlagen der numerischen Berechnung von dynamischen Übertragungssystemen
Relativ einfache Übertragungssystem-Strukturen mit nichtlinearen Elementen sind durch konventionelle Rechenmethoden im kontinuierlichen Zeitbereich nicht mehr geschlossen lösbar. Mit handelsüblichen Personal-Computern kann das Verhalten beliebig vermaschter Systemstrukturen mittels numerischer Berechnung relativ einfach ermittelt werden.
Mit der Simulation eines mathematischen Modells eines Übertragungssystems
bzw. eines Regelkreises ergibt sich die Möglichkeit, mit geeigneten Testsignalen
eine Systemanalyse oder eine Systemoptimierung durchzuführen.
Der Vorteil
der Simulation an einem Modell liegt auf der Hand. Es werden keine technischen
Anlagen gefährdet bzw. benötigt. Der Zeitfaktor spielt keine Rolle, es können
sehr schnelle oder sehr langsame Prozesse optimiert werden. Voraussetzung ist
die mathematische Beschreibung eines gut angenäherten Modells der meist
technischen Regelstrecke.
Zur numerischen Berechnung des Zeitverhaltens
regelungstechnischer Anlagen mit Totzeit existieren bezüglich der Analyse und
Optimierung von Systemen bei Anwendung kommerzieller Programme oder einfacher
Programme mit Differenzengleichungen keine anderen Alternativ-Verfahren.
Für die Durchführung der Berechnung von Übertragungssystemen oder der Simulation von Regelkreisen bieten sich käufliche Rechenprogramme an. Mit den bekannten Programmen wie Matlab und Simulink stehen umfangreiche Befehlssätze für die theoretische Modellierung von dynamischen Systemen und vielen speziellen regelungstechnischen Befehlen zur Verfügung.
Alternativ können mit selbst erstellten beliebigen Rechenprogrammen bei Anwendung von Differenzengleichungen in Verbindung mit logischen Operatoren sehr effiziente Regelkreis-Simulationen durchgeführt werden. Dabei sind relativ geringe mathematische Kenntnisse erforderlich.
Die numerische Berechnung erlaubt tabellarisch und grafisch eine völlige Durchsicht des inneren Bewegungsablaufs dynamischer Übertragungssysteme. In Verbindung mit logischen Programmbefehlen und Wertetabellen lassen sich nichtlineare, begrenzende und totzeitbehaftete Systeme simulieren.
Werden die Differenziale der Ausgangsgröße y(t) einer Differenzialgleichung
durch kleine Differenzenquotienten  mit
als diskretisierte Zeit ersetzt, entsteht eine numerisch lösbare
Differenzengleichung
in Annäherung an die Differenzialgleichung. Zweckmäßig ist die Umwandlung
linearer Elementarsysteme (Übertragungsfunktionen wie I-, PT1-, D-, PD1-Glieder)
in Differenzengleichungen. Diese können je nach Lage der Funktionsblöcke im Signalflussplan mit
nichtlinearen Systemen oder Systemen mit Totzeit und deren numerischen
Berechnungsmethoden rekursiv behandelt werden.
mit
als diskretisierte Zeit ersetzt, entsteht eine numerisch lösbare
Differenzengleichung
in Annäherung an die Differenzialgleichung. Zweckmäßig ist die Umwandlung
linearer Elementarsysteme (Übertragungsfunktionen wie I-, PT1-, D-, PD1-Glieder)
in Differenzengleichungen. Diese können je nach Lage der Funktionsblöcke im Signalflussplan mit
nichtlinearen Systemen oder Systemen mit Totzeit und deren numerischen
Berechnungsmethoden rekursiv behandelt werden.
Die numerische Berechnung der Differenzengleichungen der einzelnen
Regelkreisglieder erfolgt tabellarisch schrittweise im Abstand der diskreten
Zeit .
Die Gleichungen werden mit  Berechnungsfolgen wiederholt berechnet. Zu Beginn jeder Berechnungszeile steht
die Regelabweichung
Berechnungsfolgen wiederholt berechnet. Zu Beginn jeder Berechnungszeile steht
die Regelabweichung  .
Jede Ausgangsgröße
.
Jede Ausgangsgröße  wird zur nächsten Berechnungsfolge der gleichen Zeile zur Eingangsgröße. Jede
einzelne Differenzengleichung für ein bestimmtes Regelkreisglied bezieht sich
auf die gleiche Differenzengleichung einer zurückliegenden Folge
wird zur nächsten Berechnungsfolge der gleichen Zeile zur Eingangsgröße. Jede
einzelne Differenzengleichung für ein bestimmtes Regelkreisglied bezieht sich
auf die gleiche Differenzengleichung einer zurückliegenden Folge  .
.
→ siehe auch Grundlagen der numerischen Berechnung von dynamischen Übertragungssystemen
Modelle von Regelstrecken mit Ersatztotzeit
Das Einschwingverhalten der Regelgröße eines Regelkreises mit Totzeit oder Begrenzungseffekten für ein gegebenes Eingangssignal lässt sich - abgesehen von kommerziell erwerbbaren PC-Programmen - nur numerisch über Differenzengleichungen in Kombination mit logischen Befehlen berechnen.
Numerische Berechnungen (Simulationen)
werden tabellarisch ausgeführt. Eine Zeile enthält alle Funktionen (Gleichungen)
der Teilsysteme eines Regelkreises. In jeder Spalte steht eine Gleichung für ein
Teilsystem. Alle Zeilen sind bis auf den Zeitmaßstab  identisch. Die Folge
identisch. Die Folge  einer Zeile bestimmt ein Teilergebnis des Gesamtsystems.
einer Zeile bestimmt ein Teilergebnis des Gesamtsystems.
Differenzengleichungen können mit jeder Programmiersprache berechnet werden. Bei Anwendung der Tabellenkalkulation - Vorteil ist die Vermeidung von Programmfehlern und unmittelbare grafische Darstellung der gesuchten Größe - kann für die Berechnung der Totzeit die INDEX-Funktion innerhalb einer Matrix (hier eine Spalte) alle beliebigen Spaltenwerte anfahren.
Für die Berechnung der INDEX-Funktion zur Auswahl einer Zelle im Matrixbereich mit S = Spalte, Z = Zeile gilt:
![{\displaystyle {\text{Zahlenwert in Zelle}}(Z,S)=\mathrm {INDEX{\bigg [}Matrixbereich(Z_{ni},S_{ni});Zeile(Z_{ni});Spalte(S_{ni}){\bigg ]}} }](/svg/fa3cca172fbbefdf19843ae125e01930ece3b3a3.svg)
und abgewandelt zur Totzeitberechnung auf eine Spalte:
![{\displaystyle {\text{Zahlenwert in Zelle}}(S_{i})=\mathrm {INDEX{\bigg [}\underbrace {(S_{\mathrm {min} }:S_{\mathrm {max} })} _{\text{Spaltenbereich}};\underbrace {(S_{\mathrm {max} })-(S_{\mathrm {min} })-{\frac {T_{t}}{\Delta t}}} _{\text{Bezug}}{\bigg ]}} }](/svg/f4430e59ee7e0a5553c656ba8edab5a3e04df816.svg)
Für die numerische Berechnung mit der Tabellenkalkulation enthalten die Zellen meist Gleichungen und bilden stets Zahlenwerte ab. Die Zellposition ist durch einen Buchstaben und eine Zeilennummer definiert. Die Gleichungen beginnen mit einem Gleichheitszeichen (=) und enthalten ausschließlich die Adressen von Zellen und sind mit mathematischen Operatoren verknüpft. Die Variablen sind in einem Eingabefeld abgelegt und enthalten eine direkte Adressierung. Die Gleichungen in den Zellen einer Zeile werden von links nach rechts und bei den Zeilen von oben nach unten berechnet und beziehen sich auf die links liegenden Zelleninhalte durch Angabe der Adresse (Buchstabe und Zeilennummer).
Bei der Kopie einer Gleichung einer Zelle in die darunter liegenden Zellen mit dem Befehl „Kopie“, z.B. 1000-fach, ändern sich automatisch die Adressen in alphanumerischer Reihenfolge. Es handelt sich hier um eine relative Adressierung.
Die in der Gleichung enthaltenen Variablen wie  und
benötigen ihre Werte aus einem Eingabefeld mit direkter Adressierung.
und
benötigen ihre Werte aus einem Eingabefeld mit direkter Adressierung.
Beispiel der direkten Adressierung der Zelle B2:
Eingabefeld Zelle  .
.
Beispiel einer Gleichung zur Totzeit-Berechnung in der Spalte K mit Bezug auf Spalte J mit 2 direkten Variablen:
![{\displaystyle =\mathrm {INDEX{\bigg [}J100:J400;300-\$B\$16/\$F\$15{\bigg ]}} }](/svg/419f2a6b7d955d3d4ec032761b5181f47ec6a373.svg) .
.
- Grenzwert der Totzeit-Eingabe: Die Zelle K400 enthält
zur Totzeitberechnung die INDEX-Funktion für die Folge k = 0, also die 1.
Zeile der Systemberechnung. Für den in der INDEX-Gleichung angegebenen Bezug
mit den Variablen
 [s] und
[s] und  [s] kann maximal eine Totzeit
[s] berechnet werden. Bei größeren Totzeiten muss der Spaltenbereich erweitert
werden, anderenfalls entstehen negative Bezüge mit einer Fehlermeldung.
[s] kann maximal eine Totzeit
[s] berechnet werden. Bei größeren Totzeiten muss der Spaltenbereich erweitert
werden, anderenfalls entstehen negative Bezüge mit einer Fehlermeldung. - Leere Zellen oberhalb der Eingangsgrößen: Die Zellen der Spalte
unterhalb J400 enthalten die Zahlenwerte der Eingangsgrößen u(t).
Oberhalb der Zelle der Spalte J400 dürfen in den Zellen für den
angegebenen Spaltenbereich J100 bis J400 keine Zeichen
stehen, sie repräsentieren die Totzeit
 .
. - Totzeitbereich für
 :
Steht in der Zelle J400 als Eingangsgröße ein Zahlenwert, weisen für eine
Totzeit
:
Steht in der Zelle J400 als Eingangsgröße ein Zahlenwert, weisen für eine
Totzeit  [s] die Zellen K400 bis K600 den Zahlenwert Null aus.
[s] die Zellen K400 bis K600 den Zahlenwert Null aus.
Soll für die mathematische Beschreibung des Totzeitgliedes die Form als gebrochen rationale Funktion gewünscht sein, sind die nachfolgenden Annäherungsmodelle möglich:
-
 Totzeitapproximation mit einem Allpass 3. Ordnung in Reihe mit einem PT1-Glied.
Totzeitapproximation mit einem Allpass 3. Ordnung in Reihe mit einem PT1-Glied.
Annäherung an das Verhalten eines Totzeitgliedes durch Allpass-Glieder als Ersatztotzeit
Die Padé-Approximation der Totzeit bringt bereits bei drei identischen Allpassgliedern (n = 3) gute Ergebnisse der Totzeit-Annäherung.
Der Allpass mit einem PD-Glied im Zähler mit einer positiven Nullstelle kann wie folgt in bekannte Teilsysteme 1. Ordnung als PT1-Glied und D-Glied zerlegt werden:
Beispiel von drei identischen Allpassgliedern in Reihenschaltung mit dem Proportionalfaktor K = 1:

Damit die positive Nullstelle verschwindet, wird der Zähler des Allpasses wie nachfolgend dargestellt zerlegt.
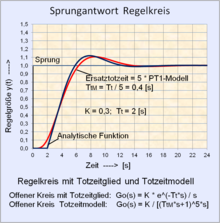
Beispiel: Wählt man eine Ersatztotzeit mit 3 Allpass-Gliedern und
= 2 [s]:

Das nebenstehende grafische Bild zeigt die Sprungantwort eines Allpassgliedes
3. Ordnung als Totzeitmodell ![{\displaystyle T_{tM}=2[s]}](/svg/7a2832f9a853e38a2b280257d174c131e2f6ac89.svg) in Reihenschaltung mit einem PT1-Glied
in Reihenschaltung mit einem PT1-Glied  .
Das Zeitverhalten der Sprungantwort des Gesamtsystems wurde numerisch über die
jedem Einzelsystem zugeordnete Differenzengleichung berechnet.
.
Das Zeitverhalten der Sprungantwort des Gesamtsystems wurde numerisch über die
jedem Einzelsystem zugeordnete Differenzengleichung berechnet.
Annäherung an das Verhalten eines Totzeitgliedes durch PTn-Glieder als Ersatztotzeit
Bereits ab n = 5 PT1-Gliedern bei gleichen Zeitkonstanten lässt sich eine gute Annäherung an ein Totzeitglied erreichen.
Die Sprungantwort eines Totzeitmodells mit 5 PT1-Gliedern mit der
Modellzeitkonstante  zeigt zwar noch beträchtliche Unterschiede im Vergleich mit einem Totzeitglied.
Wird das Totzeitmodell im Vergleich mit einem Totzeitglied in je einem
Regelkreis mit einem I-Regler gleicher Kreisverstärkung eingebunden, reduzieren
sich diese Unterschiede im Zeitverhalten.
zeigt zwar noch beträchtliche Unterschiede im Vergleich mit einem Totzeitglied.
Wird das Totzeitmodell im Vergleich mit einem Totzeitglied in je einem
Regelkreis mit einem I-Regler gleicher Kreisverstärkung eingebunden, reduzieren
sich diese Unterschiede im Zeitverhalten.

Beispiel:
Wählt man eine Ersatztotzeit mit 5 PT1-Gliedern und
= 2 [s]:

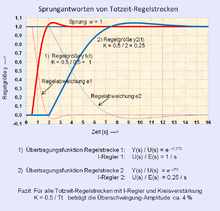
Das nebenstehende grafische Bild zeigt die Sprungantwort eines Regelkreises mit einer Regelstrecke für ein Totzeitmodell im Vergleich mit einem Totzeitglied.
Daten Regelkreis: Totzeit ![{\displaystyle T_{t}=2[s]}](/svg/2b4cdd7b1d9e4ca27eeb52ea5574a7c09697788b.svg) ,
I-Regler
,
I-Regler  .
.
Der aufgeschnittene Regelkreis mit dem Totzeitglied  lautet:
lautet:

Der aufgeschnittene Regelkreis mit der Ersatztotzeit lautet:

Gezeigt wird der Verlauf der Regelgröße mit dem Totzeitmodell und der analytischen Funktion der Totzeit.

Systemanalyse einer Regelstrecke mit Totzeit
Die Sprungantwort hat den Vorteil der einfacheren Durchführung und des
höheren Bekanntheitsgrades des zu erwartenden Ergebnisses. Die zeitunabhängige
Streckenverstärkung  kann bei Regelstrecken mit Ausgleich im statischen Zustand direkt abgelesen
werden. Das Zeitverhalten der Strecke kann durch ein Modell der Totzeit und ein
Modell des S-förmigen Anstiegs des Einschwingvorgangs bestimmt werden.
kann bei Regelstrecken mit Ausgleich im statischen Zustand direkt abgelesen
werden. Das Zeitverhalten der Strecke kann durch ein Modell der Totzeit und ein
Modell des S-förmigen Anstiegs des Einschwingvorgangs bestimmt werden.
Folgende Anforderungen werden an die Modellregelstrecke für eine Regelstrecke mit Ausgleich gestellt:
- Die Sprungantwort der Modellregelstrecke soll weitgehend deckungsgleich mit der analytischen Funktion der Regelstrecke sein.
- Die Modellregelstrecke soll eine bestimmte Form der Übertragungsfunktion aufweisen, die sich mit einem guten linearen Standardregler – beispielsweise einem PID-Regler – leicht für eine Parametrierung des Reglers eignet.
- Das Verfahren soll für Regelstrecken ab 2. Ordnung mit und ohne Totzeit anwendbar sein.
Ein PID-Regler in Produktdarstellung (Reihenschaltung) kann 2 PT1-Verzögerungen kompensieren. Deshalb wird folgende leicht zu bestimmende Form der Modellregelstrecke gewählt, die aus einer Reihenschaltung eines schwingungsfreien PT2-Glied und einem Totzeitglied besteht:

Übertragungsfunktion Modell:

Folgende Vorgänge sind in Verbindung mit einem Personal Computer vorzunehmen:
- Die Daten der Sprungantwort des Systems werden in ein Diagramm y(t) = f(t) eingetragen,
- Eine Tangente wird am Wendepunkt der aufgezeichneten Sprungantwort
angelegt und die Ersatztotzeit = Verzugszeit
 am Schnittpunkt zur Abszisse abgegriffen.
am Schnittpunkt zur Abszisse abgegriffen. - Der PC sollte mit einem beliebigen Rechenprogramm die Sprungantwort von zwei PT1-Gliedern über Differenzengleichungen erzeugen können,
- Die Modellübertragungsfunktion
 wird nach der heuristischen Methode „Versuch und Irrtum“ solange mit dem
Parameter
wird nach der heuristischen Methode „Versuch und Irrtum“ solange mit dem
Parameter  variiert, bis der S-förmige Anstieg der Sprungantwort mit der Antwort des
Modells übereinstimmt.
variiert, bis der S-förmige Anstieg der Sprungantwort mit der Antwort des
Modells übereinstimmt. - Damit sind die Ersatztotzeit
 und die Ersatzzeitkonstanten des PT2-Gliedes
gegeben. Numerische Berechnungen ergeben eine sehr gute Übereinstimmung des
Zeitverhaltens der Sprungantwort der Regelstrecke mit dem dargestellten
Modell.
und die Ersatzzeitkonstanten des PT2-Gliedes
gegeben. Numerische Berechnungen ergeben eine sehr gute Übereinstimmung des
Zeitverhaltens der Sprungantwort der Regelstrecke mit dem dargestellten
Modell.
→ Ausführliche Details siehe Identifikation einer Regelstrecke mit Ausgleich und Totzeit durch die Sprungantwort
Regelung einer Regelstrecke mit Totzeit und Verzögerungsgliedern
Häufig wird in der Fachliteratur die „Regelbarkeit“ einer Regelstrecke mit steigender Totzeit gegenüber weiteren Verzögerungsgliedern als schwierig dargestellt. Tatsächlich ist die Regelung einer Regelstrecke mit großem Totzeitanteil genauso einfach zu regeln wie bei kleinem Totzeitanteil, jedoch ist die Dynamik des Regelkreises mit steigender Totzeit ungünstig. Abhilfe bieten Regler mit Spezialstrukturen wie z.B. das Verfahren des Smith-Prädiktors.
Enthält die Regelstrecke neben PT1-Gliedern eine im Verhältnis zu einer
dominanten Zeitkonstante  eine nennenswerte Totzeit ,
ist ein I-Glied innerhalb des Regelkreises notwendig. Eine aus reiner Totzeit
bestehende Regelstrecke kann – abgesehen von Spezialreglern – nur durch einen
I-Regler geregelt werden.
eine nennenswerte Totzeit ,
ist ein I-Glied innerhalb des Regelkreises notwendig. Eine aus reiner Totzeit
bestehende Regelstrecke kann – abgesehen von Spezialreglern – nur durch einen
I-Regler geregelt werden.
Die Regelung einer Regelstrecke mit globaler Totzeit (keine weiteren Übertragungsglieder) mit einem I-Regler weist eine Besonderheit auf, dass die Kreisverstärkung
 ;
mit
;
mit  = beliebig wählbarer Faktor, der das Einschwingverhalten der Regelgröße
bestimmt.
= beliebig wählbarer Faktor, der das Einschwingverhalten der Regelgröße
bestimmt.
Auch die Grenzstabilität (konstante Dauerschwingungen) eines solchen
Regelkreises weist Regeln auf. Beispielsweise ergibt sich für  [s] laut numerischer Berechnung eine Kreisverstärkung von K = 1,566, bei der die
Regelgröße mit konstanter Amplitude schwingt. Beträgt die Totzeit
[s], gilt für die Verdopplung der Totzeit der halbe Wert der Kreisverstärkung K
= 0,783.
[s] laut numerischer Berechnung eine Kreisverstärkung von K = 1,566, bei der die
Regelgröße mit konstanter Amplitude schwingt. Beträgt die Totzeit
[s], gilt für die Verdopplung der Totzeit der halbe Wert der Kreisverstärkung K
= 0,783.
Bei festem Wert von
ergibt sich für beliebige Werte
die gleiche Höhe der Überschwingung ü. Ebenso ergibt sich in
Abhängigkeit von der Kreisverstärkung  und der Höhe der Überschwingung ü eine einfache Beziehung des ersten
Nulldurchgangs der Sollregelgröße .
Diesen Zeitraum vom Zeitpunkt
und der Höhe der Überschwingung ü eine einfache Beziehung des ersten
Nulldurchgangs der Sollregelgröße .
Diesen Zeitraum vom Zeitpunkt  bis zum Erreichen des ersten Nulldurchgangs bezeichnet man als Anregelzeit:
bis zum Erreichen des ersten Nulldurchgangs bezeichnet man als Anregelzeit:
 = Verzugszeit
+ Anstiegszeit
= Verzugszeit
+ Anstiegszeit  .
.
Regelung einer Regelstrecke als reines Totzeitglied
Mittels der numerischen Berechnung wurden folgende Zusammenhänge bei der
Berechnung eines Regelkreises mit einer Regelstrecke  und einem Regler
und einem Regler  gefunden. Damit ist es möglich, für die Parametrierung eines Reglers bei
gegebener Regelstrecke mit globaler Totzeit wichtige Parameter für einen
stabilen Regelkreis und des Einschwingvorgangs zu finden.
gefunden. Damit ist es möglich, für die Parametrierung eines Reglers bei
gegebener Regelstrecke mit globaler Totzeit wichtige Parameter für einen
stabilen Regelkreis und des Einschwingvorgangs zu finden.
Wählt man die Kreisverstärkung
für einen festen Zahlenwert ,
beträgt die Überschwingung ü des Einschwingvorgangs der Regelgröße
und die Anregelzeit
für



Beispiel einer gegebenen Regelstrecke mit globaler Totzeit:
Eingangssprung 
Regelstrecke gegeben:
für  [s] und alternativ
[s].
[s] und alternativ
[s].
Geeigneter Regler:  → für ü ≈ 4 %
→ für ü ≈ 4 %
Mit der Wahl von ü und
lässt sich der Wert der Kreisverstärkung
und der Wert der Anregelzeit
ohne aufwendigere Simulation des Regelkreises errechnen. Siehe grafische
Darstellung der Sprungantworten.
Regelstrecke mit Totzeit und weiteren PT1-Gliedern
In der Regelungstechnik ist die Parametrierung eines Reglers durch Kompensation der PT1-Verzögerungsglieder mit differenzierenden PD1-Gliedern üblich. Damit vereinfacht sich die Berechnung des aufgeschnittenen Regelkreises.
Es liegt nahe, die oben genannte Beziehung - Wahl der Kreisverstärkung für eine bestimmte Größe der Überschwingung ü - für Regelstrecken mit PT1- und Totzeit-Systemen zu nutzen, indem die PT1-Verzögerungszeiten durch PD1-Glieder des Reglers kompensiert werden.
Es wird darauf hingewiesen, dass es sich um ideale PD1-Glieder handelt, die sich technisch nicht herstellen lassen. Reale PD1-Glieder enthalten immer sogenannte parasitäre Verzögerungen, deren Zeitkonstanten in der Praxis etwa ein Zehntel der Zeitkonstanten der PD1-Glieder betragen.
Berechnungsbeispiel:
Regelstrecke gegeben:

Diese Regelstrecke ist für einen PID-Regler geeignet, indem die beiden PD-Glieder des Reglers die beiden PT1-Glieder des Regelstreckenmodells kompensieren.
Der zugehörige passende ideale PID-Regler besteht aus zwei PD1-Gliedern und einem I-Glied:
 Überschwingung.
Überschwingung.
Setzt man die Zahlenwerte für ein gewähltes ü ( und )
ein und für die Zeitkonstanten
und )
ein und für die Zeitkonstanten  ,
ergibt sich die Übertragungsfunktion des aufgeschnittenen Regelkreises zu:
,
ergibt sich die Übertragungsfunktion des aufgeschnittenen Regelkreises zu:
 Überschwingung.
Überschwingung.
Damit sind die Parameter des Reglers für die reale Regelstrecke wie folgt gegeben:
- Kreisverstärkung
 für eine Überschwingung von ca. 10 %, Zeitkonstanten des Reglers .
Die Anregelzeit des geschlossenen Regelkreises beträgt
für eine Überschwingung von ca. 10 %, Zeitkonstanten des Reglers .
Die Anregelzeit des geschlossenen Regelkreises beträgt  .
.
Möchte man den kontinuierlichen Verlauf der Sprungantwort der Regelgröße des
geschlossenen Regelkreises berechnen, kann die oben stehende
Übertragungsfunktion des aufgeschnittenen Regelkreises  mittels numerischer Berechnung benutzt werden, wenn die Schließbedingung für die
Regelabweichung
zusätzlich eingeführt und für die Integration die entsprechende
Differenzengleichung eingesetzt wird. Für die Berechnung des Totzeitgliedes
eignet sich am besten die INDEX-Funktion oder ein genaues Totzeit-Modell.
mittels numerischer Berechnung benutzt werden, wenn die Schließbedingung für die
Regelabweichung
zusätzlich eingeführt und für die Integration die entsprechende
Differenzengleichung eingesetzt wird. Für die Berechnung des Totzeitgliedes
eignet sich am besten die INDEX-Funktion oder ein genaues Totzeit-Modell.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 11.09. 2025