Differenzengleichung
Differenzengleichungen werden zur numerischen Berechnung in vielen wissenschaftlichen Disziplinen – wie Wirtschaft, Medizin, Technik, Elektrotechnik, Kybernetik, Informatik, Akustik und andere – eingesetzt.
Eine Differenzengleichung ist eine numerisch lösbare Berechnungsvorschrift
für eine diskret
definierte Folge ![{\displaystyle k=[0,\ 1,\ 2,\ 3,\dotsc ]}](/svg/23899c9bd7d90a487130ff66111585d6ac97b06d.svg) von Folgegleichungen, die Variablen
von Folgegleichungen, die Variablen  zu fortlaufenden nummerierten Ereignissen bzw. nummerierten Zeitpunkten im
Abstand eines Intervalls
zu fortlaufenden nummerierten Ereignissen bzw. nummerierten Zeitpunkten im
Abstand eines Intervalls  berechnen.
berechnen.
Die rekursive Lösung einer Differenzengleichung erster Ordnung erfolgt von einer Anfangsbedingung durch nummerierte Folgegleichungen, die sich je auf das Ergebnis einer zurückliegenden Folgegleichung bezieht. Bei Differenzengleichungen höherer Ordnung bezieht sich jede aktuelle Folgegleichung, entsprechend der Ordnungszahl, auf mehrere der zurückliegenden Folgegleichungen.
Das Lösungsergebnis  besteht aus gestuften nummerierten Einzelergebnissen als sogenannte
Funktions-Stützstellen (auch Knoten genannt).
besteht aus gestuften nummerierten Einzelergebnissen als sogenannte
Funktions-Stützstellen (auch Knoten genannt).
Für die Aufstellung der meisten Differenzengleichungen werden verschiedene Verfahren eingesetzt, wie das einfache Euler-Streckenzugverfahren oder die besseren und aufwendigeren Mehrschrittverfahren. Die komplizierteren Mehrschrittverfahren benötigen vorteilhaft für ein gleiches genaues Berechnungsergebnis eine wesentlich geringere Anzahl von Folgegleichungen.
Zwischen einer Differentialgleichung und einer Differenzengleichung besteht eine enge mathematische Verwandtschaft. Wird der Differentialquotient durch einen Differenzenquotient ersetzt, entsteht die Differenzengleichung. Damit ist zwangsläufig ein Bezug zu einer zurückliegenden Folgegleichung gegeben.
Einfache Differenzengleichungen vom Typ  mit nur einer Variablen
und einer festen Stufung können auch ohne Differentialgleichungen durch logische
Betrachtungsweisen entstehen (z.B. Bevölkerungswachstum, Zinseszins).
mit nur einer Variablen
und einer festen Stufung können auch ohne Differentialgleichungen durch logische
Betrachtungsweisen entstehen (z.B. Bevölkerungswachstum, Zinseszins).
Der Schwerpunkt dieses Artikels befasst sich mit der Erstellung der Differenzengleichungen nach dem Euler-Streckenzug-Verfahren zur numerischen Berechnung dynamischer Systeme. Dabei werden auch andere Diskretisierungsverfahren, Totzeitsysteme, nichtlineare Systeme und die z-Transformation tangiert.
Anwendung numerische Berechnungsmethoden mit Differenzengleichungen
- Numerische Berechnungen im wissenschaftlichen Bereich hoher Genauigkeit:
- Für die numerische Berechnung wissenschaftlicher Aufgaben höchster Genauigkeit kommen meist (kommerzielle) Spezialprogramme zum Einsatz.
- Anwendungen sind z.B. Wettersimulation oder Flugbahnverfolgung von Satelliten (Raumflugmechanik). Dabei werden häufig Großrechenanlagen eingesetzt.
- Kommerzielle Programme numerischer Verfahren:
- Für den ingenieurtechnischen Bereich stehen die bekanntesten Programme wie Matlab und Simulink mit umfangreichen Befehlssätzen für die theoretische Modellierung von dynamischen Systemen und vielen speziellen kybernetischen und regelungstechnischen Anwendungen zur Verfügung. Für diese Aufgaben ist ein normal ausgestatteter Personal Computer geeignet.
- Kommerzielle Programme zur numerischen Berechnungen wie Matlab
unterscheiden sich von einfachen numerischen Eulerverfahren in drei
wesentlichen Punkten:
- Es kann eine gewünschte Berechnungsgenauigkeit durch ausgewählte Verfahren bestimmt werden.
- Die gewählten Verfahren sind adaptiv, d.h. es muss kein diskretes Intervall (auch Zeitintervall) und maximale Folge vorgegeben werden. Die Größe des Intervalls ist auch nicht über alle Folgen konstant.
- Die gewählten Verfahren kontrollieren die Stabilität der Lösung.
- Numerische Verfahren mit Differenzengleichungen:
- Als einfachstes Verfahren zur Erstellung der Differenzengleichungen wird meistens das explizite Euler-Streckenzugverfahren verwendet.
- Andere Methoden der numerischen Berechnung bedienen sich zur besseren Approximation z.B. an Stelle des Euler-Streckenzugverfahrens des Trapezflächenverfahrens (Heun-Verfahren), des Mehrschrittverfahrens (Adams-Bashforth-Verfahren) und anderer Verfahren. Grund der aufwendigeren Approximationsverfahren und damit der umfangreicheren Differenzengleichungen ist die erzielbare höhere Genauigkeit und damit Reduzierung der Rekursionsfolgen, was bei langsamen Mikrocomputern und dessen Schnittstellen bei Echtzeitberechnungen erforderlich sein kann.
- Offline-Anwendung zur numerischen Simulation dynamischer Systeme:
- In vielen Anwendungsfällen werden Differenzengleichungen offline als
Computer-Simulation am Personal Computer zur zeitdiskreten Darstellung
dynamischer Vorgänge verwendet. Hierbei ist die diskretisierte Zeit
 ein Parameter, keine echte Zeit.
ein Parameter, keine echte Zeit.
- Bei dynamischen Übertragungssystemen
 beliebiger Ordnung interessiert das zeitliche Verhalten des Ausgangssignals
beliebiger Ordnung interessiert das zeitliche Verhalten des Ausgangssignals
 als Funktion des Eingangssignals
als Funktion des Eingangssignals  und der Systemparameter.
und der Systemparameter.
- Jede Differenzengleichung einer Programmzeile ist eine Folgegleichung mit
der Ausgangsgröße
und bezieht sich entsprechend dem Rekursions-Algorithmus
bei Differenzengleichungen 1. Ordnung auf eine zurückliegende Zeile

- Das Ergebnis ist eine gespeicherte Tabelle von Programmzeilen mit den
Berechnungsfolgen
 gegeben. Die Ausgangsgröße
der Endgleichung einer Zeile liegt im Abstand
vor und kann leicht zu einer Grafik
gegeben. Die Ausgangsgröße
der Endgleichung einer Zeile liegt im Abstand
vor und kann leicht zu einer Grafik  gestaltet werden.
gestaltet werden.
- Online-Anwendung der digitalen Regelung:
- Bei der digitalen Regelung erfolgt im einfachsten Falle eine zeitliche Abtastung und Digitalisierung der Regeldifferenz. Im gleichen Abtast-Intervall berechnet ein Mikrocomputer mit Hilfe von Differenzengleichungen den notwendigen Regel-Algorithmus. Die digitale Ausgangsgröße des Reglers, die Stellgröße, wird für die meist analog wirkenden Regelstrecken durch Wandler analogisiert.
- Bei solchen Signalabtastungen im Rhythmus der Abtastzeit
 handelt es sich um eine echte Zeit.
handelt es sich um eine echte Zeit.
- Anders als bei der Simulation muss der Mikrocomputer kontinuierlich unendlich oft im Abstand der Abtastzeit für jede neue Eingangsgröße einen neuen Digitalwert berechnen.
- Bei den häufig vorkommenden Differenzengleichungen 1. Ordnung wird nur
eine Programmeile für die Berechnung der aktuellen Ausgangsgröße
und die Programmzeile
der vorherigen Berechnung gespeichert. Jede Ausgangsgröße bezieht sich
rekursiv auf die vorhergehende Ausgangsgröße als Eingangsgröße. Die Ergebnisse
weiterer vorhergehender Programmzeilen werden nicht benötigt und deshalb
gelöscht.
- Eine Programmzeile beinhaltet je nach gewünschtem Regelalgorithmus mehrere Differenzengleichungen vorteilhaft in Produktdarstellung, weil differenziell wirkende Übertragungsglieder des Reglers die verzögernd wirkenden Übertragungsglieder der Regelstrecke kompensieren können. Damit wird die Parametrierung des Digitalreglers sehr vereinfacht, indem die Zeitkonstanten der differenzierenden Komponenten des Reglers denen der Verzögerungsglieder der Regelstrecke gleichgesetzt werden.
- Die Ausgangsgröße einer Differenzengleichung ist die Eingangsgröße der nächsten Differenzengleichung der gleichen Programmzeile.
- In der Fachliteratur unterscheiden sich Differenzengleichungen je nach der Aufgabenstellung, dem Diskretisierungsverfahren, der Art der physikalischen Größen und den dargestellten Größenbezeichnungen erheblich.
Grundlagen der Differenzengleichungen
Zum besseren Verständnis dieses Themas werden Kenntnisse der Differentialrechnung, der Laplace-Transformation und der s-Übertragungsfunktion vorausgesetzt.
Differentialgleichungen
Eine lineare Differentialgleichung enthält die gesuchte Funktion  und deren Ableitungen nur in der ersten Potenz. Es dürfen auch keine Produkte
der gesuchten Funktion und ihren Ableitungen auftreten. Die gesuchte Funktion
darf auch nicht in Argumenten von Winkelfunktionen, Logarithmen usw. erscheinen.
und deren Ableitungen nur in der ersten Potenz. Es dürfen auch keine Produkte
der gesuchten Funktion und ihren Ableitungen auftreten. Die gesuchte Funktion
darf auch nicht in Argumenten von Winkelfunktionen, Logarithmen usw. erscheinen.
Eine Differentialgleichung, in der gewöhnliche Ableitungen einer unbekannten
Funktion  bis zur n-ten Ordnung auftreten, wird als gewöhnliche DGL n-ter Ordnung
bezeichnet. Die zu den Ableitungen zugehörigen Koeffizienten können variabel
sein oder konstante Zahlenwerte enthalten. Sind es Konstanten, bezeichnet man
diese Differentialgleichungen als gewöhnliche lineare Differentialgleichungen
mit konstanten Koeffizienten. Lineare gewöhnliche Differentialgleichungen
mit konstanten Koeffizienten werden gerne als Spezialform bezeichnet, dennoch
kommt dieser Typ Differenzialgleichung in der Systemtheorie und Regelungstechnik
hauptsächlich zur Anwendung.
bis zur n-ten Ordnung auftreten, wird als gewöhnliche DGL n-ter Ordnung
bezeichnet. Die zu den Ableitungen zugehörigen Koeffizienten können variabel
sein oder konstante Zahlenwerte enthalten. Sind es Konstanten, bezeichnet man
diese Differentialgleichungen als gewöhnliche lineare Differentialgleichungen
mit konstanten Koeffizienten. Lineare gewöhnliche Differentialgleichungen
mit konstanten Koeffizienten werden gerne als Spezialform bezeichnet, dennoch
kommt dieser Typ Differenzialgleichung in der Systemtheorie und Regelungstechnik
hauptsächlich zur Anwendung.
Lösung einer Differentialgleichung:
Unter einer Lösung der Differentialgleichung ![{\displaystyle y'=f[x,y(x)]}](/svg/8e4a899c11f5082ec6ef150a4ce6d2102459f331.svg) versteht man eine Funktion
versteht man eine Funktion  ,
keinen Einzelwert.
,
keinen Einzelwert.
Die Lösung einer Differentialgleichung erfolgt durch Integration. Die
Integration ist keine eindeutige Rechenoperation, denn man erhält zu jeder
Funktion  verschiedene Stammfunktionen
verschiedene Stammfunktionen
 mit dem Begriff des unbestimmten Integrals.
mit dem Begriff des unbestimmten Integrals.
Bei der Integration wird zwischen dem bestimmten und dem unbestimmten
Integral unterschieden. Die Stammfunktion
ist Lösung des unbestimmten Integrals:
Lösung der Differentialgleichung: 

Diese Lösung ist unbestimmt wegen der unbestimmten Integrationskonstante
 .
Jede Integration ergibt Integrationskonstanten, deren Anzahl durch die Ordnung
der Differentialgleichung bestimmt ist. Die Lösung einer Differentialgleichung
n-ter Ordnung enthält
.
Jede Integration ergibt Integrationskonstanten, deren Anzahl durch die Ordnung
der Differentialgleichung bestimmt ist. Die Lösung einer Differentialgleichung
n-ter Ordnung enthält  voneinander unabhängige Integrationskonstanten. Diese sind für eine spezielle
Lösung der Differentialgleichung abhängig von den Eigenwerten und gegebenen
Anfangsbedingungen des Übertragungssystems zu bestimmen.
voneinander unabhängige Integrationskonstanten. Diese sind für eine spezielle
Lösung der Differentialgleichung abhängig von den Eigenwerten und gegebenen
Anfangsbedingungen des Übertragungssystems zu bestimmen.
Nichtlineare Differentialgleichungen sind nur in sehr seltenen Ausnahmefällen analytisch lösbar. Sie können mittels der numerischen zeitdiskreten Methoden gelöst werden.
Differenzengleichungen aus Differentialgleichungen
Die kontinuierlichen mathematischen Operationen der Integration und Differentiation der Differentialgleichungen werden bei Differenzengleichungen diskret durch Summen- und Differenzenbildung angenähert.
Differenzengleichungen beziehen sich allgemein auf die Differentialquotienten
einer Differentialgleichung, die durch Differenzenquotienten  (Differenzenquotient 1. Ordnung) ersetzt werden. Damit entsteht eine numerisch
lösbare rekursive Differenzengleichung in Annäherung an die analytische Lösung
der Differentialgleichung [rekursiv = Mathematik: zu bekannten Werten
zurückgehend].
(Differenzenquotient 1. Ordnung) ersetzt werden. Damit entsteht eine numerisch
lösbare rekursive Differenzengleichung in Annäherung an die analytische Lösung
der Differentialgleichung [rekursiv = Mathematik: zu bekannten Werten
zurückgehend].
Definitionen der Parameter:
- Nachfolgend wird die unabhängige Variable mit
 und die abhängige Variable mit
und die abhängige Variable mit  oder
oder
bezeichnet. Handelt es sich um Zeitvorgänge, so wird
oder
oder
bezeichnet. Handelt es sich um Zeitvorgänge, so wird  als unabhängige Variable und
oder
als abhängige Variable bezeichnet.
als unabhängige Variable und
oder
als abhängige Variable bezeichnet. - Die Größe
 ist die übliche Bezeichnung einer mathematischen Folge von Daten. Andere
Bezeichnungen einer Folge
innerhalb der Fachliteratur sind "
ist die übliche Bezeichnung einer mathematischen Folge von Daten. Andere
Bezeichnungen einer Folge
innerhalb der Fachliteratur sind " "
und "".
"
und "". - Die Größe
 ist das Intervall (Schrittweite) zwischen den Folgen mit der unabhängigen
Variablen .
Bei Zeitvorgängen ist das Intervall .
ist das Intervall (Schrittweite) zwischen den Folgen mit der unabhängigen
Variablen .
Bei Zeitvorgängen ist das Intervall . - Die Indizierung der diskreten Größen wie:
-
= "Aktuelle Größe";
 = "um einen positiven Folgeschritt geänderte aktuelle Größe";
= "um einen Schritt zurückliegende Größe".
= "um einen positiven Folgeschritt geänderte aktuelle Größe";
= "um einen Schritt zurückliegende Größe".
Homogene und inhomogene Differenzengleichung:
Aus der Differentialgleichung
entsteht die diskrete Differenzengleichung ![{\displaystyle y_{(k+1)}=f\,[y_{(k)},x_{(k)},\Delta x]}](/svg/22e26efc8398ebd3d114326e491206b689f30906.svg) .
Die Indizierung der Differenzengleichung mit der Folge
kennzeichnet, dass es sich um eine schrittweise Annäherung an die analytische
Funktion der Lösung
handelt.
.
Die Indizierung der Differenzengleichung mit der Folge
kennzeichnet, dass es sich um eine schrittweise Annäherung an die analytische
Funktion der Lösung
handelt.
Die Lösung einer Differenzengleichung bezieht sich meist auf die
Integrationsgrenzen der Wertefolgen von  bis
bis  .
Deshalb existiert das Problem der Integrationskonstanten der numerischen
Berechnung nicht.
.
Deshalb existiert das Problem der Integrationskonstanten der numerischen
Berechnung nicht.
Aus der allgemeinen Form einer homogenen
linearen Differentialgleichung erster Ordnung mit den konstanten Koeffizienten
 und
und  entsteht durch Austausch des Differentialquotienten
entsteht durch Austausch des Differentialquotienten  durch einen Differenzenquotienten
durch einen Differenzenquotienten  und der Schrittweite
die rekursive Differenzengleichung:
und der Schrittweite
die rekursive Differenzengleichung:

Bedeutung: Ein dynamisches System mit einer zu Null gesetzten
Differenzengleichung startet von einem Anfangswert  .
Die Systembewegung
ist sich selbst mit dem momentanen Inhalt seines Systemspeichers überlassen.
.
Die Systembewegung
ist sich selbst mit dem momentanen Inhalt seines Systemspeichers überlassen.
Aus der allgemeinen Form einer inhomogenen linearen Differentialgleichung
erster Ordnung entsteht durch Austausch des Differentialquotienten
durch einen Differenzenquotienten
und der Schrittweite
die rekursive Differenzengleichung:

Bedeutung: Ein dynamisches System mit einer Eingangsgröße  startet von einem Anfangswert
startet von einem Anfangswert  .
Der Verlauf der Ausgangsgröße
ist abhängig von der Eingangsgröße und dem Verhalten seines Systemspeichers.
.
Der Verlauf der Ausgangsgröße
ist abhängig von der Eingangsgröße und dem Verhalten seines Systemspeichers.
Dynamische Systeme werden durch verschiedene Formen von Differentialgleichungen beschrieben.
Lösung einer Differenzengleichung:
Die Lösung einer linearen Differenzengleichung in Annäherung an die
analytische Funktion  ist eine Folge von nummerierten Folgegleichungen der Folge
ist eine Folge von nummerierten Folgegleichungen der Folge ![{\displaystyle k=[0,1,2,3,\dotsc ]}](/svg/2b5c9a327864e921a9dc4fd1d023ffddc14a888e.svg) im Abstand .
im Abstand .
Nichtlineare Übertragungssysteme können – durch Separieren der Nichtlinearität (z.B. Hammerstein-Modell) – häufig mit Hilfe von logischen Operatoren wie z.B. mit WENN-DANN-SONST-Anweisungen bei Signalbegrenzungen und Hysterese gelöst werden. Auch für System-Totzeitverhalten existieren numerische INDEX-Anweisungen durch rückwertige Tabellen-Spaltenverschiebungen.
Differenzengleichungen nach dem Euler-Streckenzugverfahren
Euler Streckenzugverfahren:
Allgemein berechnen Differenzengleichungen in Annäherung an eine
kontinuierliche Funktion
schrittweise eine Wertefolge
mit den Folgegliedern
für ein kleines Intervall  die Wertefolge
die Wertefolge  an der Stelle
an der Stelle  ,
wobei
eine Nummerierung der errechneten Werte
darstellt.
,
wobei
eine Nummerierung der errechneten Werte
darstellt.
Ist eine Funktion
mit einem Anfangswert
 für eine Differentialgleichung 1. Ordnung gegeben, lässt sich über die
Differenzengleichung in Annäherung an die analytische Funktion die nächste
Stützstelle
an der Stelle
für eine Differentialgleichung 1. Ordnung gegeben, lässt sich über die
Differenzengleichung in Annäherung an die analytische Funktion die nächste
Stützstelle
an der Stelle  für die Schrittweite
berechnen. Das gilt auch für alle weiteren Stützstellen im Abstand ,
die sich schrittweise der analytischen Funktion annähern. In der Praxis muss zur
grafischen Darstellung des kontinuierlichen Funktionsverlaufs
nicht interpoliert werden, PC-Grafikprogramme beherrschen die Interpolation der
Stützstellen.
für die Schrittweite
berechnen. Das gilt auch für alle weiteren Stützstellen im Abstand ,
die sich schrittweise der analytischen Funktion annähern. In der Praxis muss zur
grafischen Darstellung des kontinuierlichen Funktionsverlaufs
nicht interpoliert werden, PC-Grafikprogramme beherrschen die Interpolation der
Stützstellen.
Die Differenzengleichung verknüpft je nach Größe der Ordnung die aktuell errechneten Werte der Stützstellen zu einer oder zu mehreren zurückliegenden Stützstellen.
![{\displaystyle y_{(k)}=f[y_{(k-1)},y_{(k-2)},y_{(k-3)},\dotsc ]}](/svg/49b1a47de0ac56046790392d20622364c3680a90.svg)
Zum leichteren Verständnis des Euler-Streckenzug-Verfahrens werden
Differenzengleichungen 1. Ordnung mit einer Ableitung betrachtet. Jede
gewöhnliche Differentialgleichung höherer Ordnung lässt sich in einzelne
Differentialgleichungen 1. Ordnung überführen. Ein zusammenhängendes
Übertragungssystem in Form von Differenzengleichungen 1. Ordnung lässt sich
hintereinander für jede Folge
und einer gegebenen Eingangsgröße berechnen. Dabei ist jeder errechneter
Ausgangs-Folgewert die Eingangsgröße der nächsten Differenzengleichung der
gleichen Folge. Berechnete Übertragungssysteme mit mehreren
Differenzengleichungen und einer endlichen Folge von  bis
bis  werden im PC zur besseren Übersicht tabellarisch gespeichert. Jede Zeile mit den
Differenzengleichungen ist mathematisch identisch und zeigt von links nach
rechts das jeweilige Teilergebnis der entsprechenden Folge.
werden im PC zur besseren Übersicht tabellarisch gespeichert. Jede Zeile mit den
Differenzengleichungen ist mathematisch identisch und zeigt von links nach
rechts das jeweilige Teilergebnis der entsprechenden Folge.
Lineare Übertragungssysteme höherer Ordnung, die in Differentialgleichungen
1. Ordnung zerlegt werden und deren Systemverhalten mittels
Differenzengleichungen 1. Ordnung berechnet werden, konvergieren
nach dem Euler-Verfahren zur analytischen Funktion, wenn das Intervall
beziehungsweise im Zeitbereich das Intervall
gegen Null geht.
Explizites Euler-Streckenzugverfahren (Euler-Vorwärts)

Das klassische Verfahren der Lösung von Differentialgleichungen mit
Differenzengleichungen ist das explizite Euler-Verfahren mit der
Berechnungsfolge .
Das Verfahren wird für jeden Rechenschritt (Stützpunkt, Knoten)  für die Ableitung
für die Ableitung  durch einen Vorwärts-Differenzenquotienten approximiert. Der Begriff
Vorwärts-Differenzenquotient bezieht sich auf die linke Intervallgrenze laut
Diagramm
durch einen Vorwärts-Differenzenquotienten approximiert. Der Begriff
Vorwärts-Differenzenquotient bezieht sich auf die linke Intervallgrenze laut
Diagramm  nach
nach  mit dem Intervall .
mit dem Intervall .
Der Vorwärts-Differenzenquotient für eine Funktion  lautet:
lautet:

Beim Euler-Vorwärts-Verfahren wird das Integral für einen Streckenzug approximiert:
![{\displaystyle \int _{x}^{x+h}f[y(x)dx]\approx h\cdot f[y_{k},x_{k}]}](/svg/df0578ca056077fc3a59421dfcdbc47bec4aea59.svg)
Die Annäherung für das Integral ist die Festlegung, dass der Integrand  im gesamten Integrationsintervall konstant ist und durch den Wert
am linken Rand des Integrationsintervalls ersetzt werden kann.
im gesamten Integrationsintervall konstant ist und durch den Wert
am linken Rand des Integrationsintervalls ersetzt werden kann.  und
und  sind bekannte Größen (Anfangswerte).
sind bekannte Größen (Anfangswerte).
Der Algorithmus zur Approximation des Integrals führt auf folgende Berechnungsvorschrift:
Explizite Form der Differenzengleichung der Vorwärtsdifferenz:

Für die Terme der Differenzengleichung lassen sich die Integrationsgrenzen der Indizierungen um (−1) zurücksetzen. Damit entsteht eine identisch verwendbare Form der Differenzengleichung als Rückwärtsdifferenz (siehe Implizites Eulerverfahren):

Dabei bedeutet:
 =
=
-
sind die aktuellen Lösungen der rekursiven Differenzengleichung.
 ist der Folge
zugeordnet.
ist der Folge
zugeordnet.
-
= das um einen Schritt
zurückliegende Ergebnis,
 bedeutet: Parameter der diskretisierten Differentialgleichung zu einer
Differenzengleichung.
bedeutet: Parameter der diskretisierten Differentialgleichung zu einer
Differenzengleichung.
- Diese Parameter und
sind in jeder Berechnungsfolge konstant. (Es existieren aber auch aufwendigere
Diskretisierungsverfahren, die variable Intervalle
benutzen.)
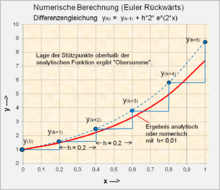
Durch die Anwendung dieser Form der Differenzengleichung (Rückwärtsdifferenz)
ergibt sich der Verlauf von
als Obersumme
gegenüber der analytischen Funktion .
Die zugehörige Differenzengleichung entsteht erst durch Einsetzen des
Differenzenquotienten anstelle des Differenzialquotienten in der
Differentialgleichung.
Das explizite Eulerverfahren wird auch unter dem Begriff: Integrationsformel (Euler-Cauchy-Verfahren) bezeichnet.
Implizites Euler-Streckenzugverfahren (Euler Rückwärts)

Bei diesem Verfahren wird nicht der – wie beim expliziten Verfahren
berechnete Stützpunkt  – benutzt, sondern ein neuer Punkt
– benutzt, sondern ein neuer Punkt  festgelegt. Das implizite Eulerverfahren entsteht, wenn bei der Approximation
des Integrals durch eine Rechteckfläche mit der Höhe des Funktionswertes nicht
am linken, sondern am rechten Rand des Intervalls festgelegt und als Stützpunkt
verwendet wird.
festgelegt. Das implizite Eulerverfahren entsteht, wenn bei der Approximation
des Integrals durch eine Rechteckfläche mit der Höhe des Funktionswertes nicht
am linken, sondern am rechten Rand des Intervalls festgelegt und als Stützpunkt
verwendet wird.
Da dieser Stützpunkt zunächst unbekannt ist, besteht die Notwendigkeit, erst
eine meist nichtlineare Gleichung (bzw. System) zu lösen. Diese kann mit
geeigneten numerischen Verfahren, z.B. dem Newton-Verfahren, Fixpunktiteration
gelöst werden. Dieses implizite Euler-Verfahren gilt als unbeschränkt stabil,
d.h. der Größe des Intervalls
unterliegt aufgrund der Stabilität keiner Beschränkung.
Das implizite Euler-Verfahren wird für jeden Rechenschritt (Stützpunkt,
Knoten)
für die Ableitung
durch einen Rückwärts-Differenzenquotienten approximiert.
Der Rückwärts-Differenzenquotient für eine Funktion
lautet:

Beim Euler-Rückwärts-Verfahren wird das Integral für einen Streckenzug approximiert:
![{\displaystyle \int _{x}^{x+h}f[y(x)dx]\approx h\cdot f[y_{k+1},x_{k+1}]}](/svg/4d03d428b45879e8f9aa8cf2886ce1bd3e5a7cb1.svg)
Der Algorithmus zur Approximation des Integrals führt auf folgende Berechnungsvorschrift:
Implizite Form der Differenzengleichung der Rückwärtsdifferenz:

Anmerkungen:
- Verfahren, bei denen zu jedem Stützpunkt eine Gleichung gelöst werden muss, werden als implizite Verfahren bezeichnet.
- Beim implizierten Euler-Verfahren hängt
von sich selbst ab. Zur Berechnung von
ist meist die Lösung einer nichtlinearen Gleichung erforderlich.
- Die nichtlineare Gleichung kann z.B. mit dem Newton-Verfahren gelöst werden.
- Das implizierte Euler-Streckenzug-Verfahren gilt bei großen Schrittweiten
(sind praktisch unbrauchbar) gegenüber dem expliziten Verfahren als das
stabilere Verfahren. Die Approximation an die analytische Funktion ist bei
beiden Methoden ähnlich.
Berechnungsbeispiel Euler-Streckenzugverfahren
Sind durch die numerische Berechnung einer Differentialgleichung die an die Originalfunktion approximierten Stützstellen ermittelt, können diese durch Interpolation, z.B. mit geraden Strecken als geschlossene Funktion dargestellt werden. Die Grafikfunktionen der Tabellenkalkulation stellen bei Tabellenwerten automatisch durch Interpolation geschlossenen Funktionen dar.
Entscheidend für das Ergebnis der numerischen Berechnung ist die
Differenzengleichung in der Startzeile für  ,
bzw.
,
bzw.  .
Damit ist festgelegt, ob es sich bei dem Ergebnis
um eine Obersumme oder Untersumme gegenüber der analytischen Funktion handelt.
Ober- und Untersumme können sich durch eine einzelne Schrittweite
unterscheiden.
.
Damit ist festgelegt, ob es sich bei dem Ergebnis
um eine Obersumme oder Untersumme gegenüber der analytischen Funktion handelt.
Ober- und Untersumme können sich durch eine einzelne Schrittweite
unterscheiden.
Beispiel einer numerischen Berechnung einer gegebenen Differentialgleichung 1. Ordnung
-
Gegeben: Differentialgleichung  ,
Anfangswert
,
Anfangswert 
- Analytische Lösung:

Gesucht: Differenzengleichung nach Euler-Rückwärts:
Die Ableitung

wird näherungsweise durch den Differenzenquotient ersetzt.
ersetzt. Die Differenzengleichung wird nach
freigestellt: - Schrittweite h = 0,2; e = 2,718.
Folge
k
Parameter 
Ergebnis Analytisch 
0 0 0 0,4  = 1
= 11 1 0,2 1 0,597 1,597 1,492 2 0,4 1,597 0,890 2,487 2,225 3 0,6 2,487 1,328 3,815 3,320 4 0,8 3,815 1,981 5,796 4,952 5 1,0 5,796 2,955 8,751 7,387 - Analytische Lösung:


Anmerkung zur Programmierung von Differenzengleichungen:
Das tabellarische Ergebnis ![{\displaystyle y_{(k)}=[y_{(0)},y_{(1)},y_{(2)},y_{(3)},\dotsc ,y_{\mathrm {(max)} }]}](/svg/9902ab9c5cc45399cc4f6aea39cf1376778fe091.svg) ist eine Folge von Berechnungspunkten (Stützstellen) in Annäherung an die
analytische Funktion. Werden diese Punkte interpoliert,
entsteht eine geschlossene Funktion. Mit fallender Größe von
konvergiert die numerische Lösung gegenüber der analytischen Funktion im
Unendlichen.
ist eine Folge von Berechnungspunkten (Stützstellen) in Annäherung an die
analytische Funktion. Werden diese Punkte interpoliert,
entsteht eine geschlossene Funktion. Mit fallender Größe von
konvergiert die numerische Lösung gegenüber der analytischen Funktion im
Unendlichen.
Differenzengleichungen können mit jeder Programmiersprache berechnet
werden. Da das Ergebnis der Berechnungsfolgen immer tabellarisch ist,
empfiehlt es sich die Software der Tabellenkalkulation
anzuwenden. Die Differenzengleichung wird beliebig oft kopiert. Der Vorteil:
Das Programm macht keine Fehler, die Rechengenauigkeit (Dezimalstellen) ist
sehr hoch, die grafische Darstellung der Funktion
ist als XY-Diagramm bereits im Programm enthalten und muss nur aufgerufen
werden.
Zur Erzielung einer höheren Genauigkeit der Approximation an die
Originalfunktion sind viele Berechnungsfolgen, z.B. 100, 1000 und mehr,
mit dem Euler-Streckenzug-Verfahren erforderlich, wenn ein Annäherungsfehler –
bezogen auf den Endwert – von ca. 1 % zugelassen werden soll. Die Anzahl
der Berechnungsfolgen kann abhängig von der gewünschten Auflösung von  bis
bis  festgelegt werden. Die Grenzen der Genauigkeit bei Steigerung der Folgen sind
gegeben, wenn die Rundungsfehler
einer jeden Folge sich zu größeren Fehlerwerten aufaddieren können.
festgelegt werden. Die Grenzen der Genauigkeit bei Steigerung der Folgen sind
gegeben, wenn die Rundungsfehler
einer jeden Folge sich zu größeren Fehlerwerten aufaddieren können.
Bei einer Schrittweite von  ergibt sich bei dem Rechenbeispiel für
ergibt sich bei dem Rechenbeispiel für  ein Wert von 7,452 mit der Abweichung von 0,065. Dies entspricht einem Fehler
von 0,88 %.
ein Wert von 7,452 mit der Abweichung von 0,065. Dies entspricht einem Fehler
von 0,88 %.
Bei einer Schrittweite von  ergibt sich bei dem Rechenbeispiel für
ergibt sich bei dem Rechenbeispiel für  ein Wert von 7,394 mit der Abweichung von 0,0065. Dies entspricht einem Fehler
von 0,088 %.
ein Wert von 7,394 mit der Abweichung von 0,0065. Dies entspricht einem Fehler
von 0,088 %.
Anmerkung zum Anfangswert: (Anfangswertproblem)
Wäre der Anfangswert
nicht bekannt gewesen, dann würde die Differenzengleichung mit  starten. Da diese Form der Differenzengleichung die Obersumme (die
Approximation liegt oberhalb der analytischen Funktion) darstellt, ergäbe sich
ein Wert für
starten. Da diese Form der Differenzengleichung die Obersumme (die
Approximation liegt oberhalb der analytischen Funktion) darstellt, ergäbe sich
ein Wert für  an der Stelle
an der Stelle  und damit eine Verschiebung aller anderen Werte für .
Bei einem kleinen Folge-Endwert wäre damit ohne Kenntnis des Anfangswertes
die Approximation falsch.
und damit eine Verschiebung aller anderen Werte für .
Bei einem kleinen Folge-Endwert wäre damit ohne Kenntnis des Anfangswertes
die Approximation falsch.
Mit dem Newton-Verfahren
als Standard-Verfahren zur numerischen Lösung von nichtlinearen Gleichungen
lassen sich Näherungswerte zu Lösungen der Gleichung  ,
d.h. Näherungen der Nullstellen
dieser Funktion finden. Die grundlegende Idee dieses Verfahrens ist, die
Funktion in einem Ausgangspunkt zu linearisieren, d.h. ihre Tangente zu bestimmen, und
die Nullstelle der Tangente als verbesserte Näherung der Nullstelle der
Funktion zu verwenden. Die erhaltene Näherung dient als Ausgangspunkt für
einen weiteren Verbesserungsschritt.
,
d.h. Näherungen der Nullstellen
dieser Funktion finden. Die grundlegende Idee dieses Verfahrens ist, die
Funktion in einem Ausgangspunkt zu linearisieren, d.h. ihre Tangente zu bestimmen, und
die Nullstelle der Tangente als verbesserte Näherung der Nullstelle der
Funktion zu verwenden. Die erhaltene Näherung dient als Ausgangspunkt für
einen weiteren Verbesserungsschritt.
Der Vorteil der Darstellung der Obersumme ist die Differenzierbarkeit des
Wertes  an der Stelle .
(Anwendung in der Systemtheorie und Regelungstechnik bei Stoßfunktionen).
an der Stelle .
(Anwendung in der Systemtheorie und Regelungstechnik bei Stoßfunktionen).
Modifiziertes Eulerverfahren
Zur besseren Approximation an eine analytische Funktion besteht die Möglichkeit, anstelle der Vorwärts- oder Rückwärtsdifferenz den Mittelwert der beiden Gleichungen zu verwenden.

Diese Gleichung wird als zentraler Differenzenquotient oder als symmetrische Differenz bezeichnet und entspricht dem Mittelwert aus der Vorwärts- und Rückwärtsdifferenz. Wird dieser Differenzenquotient in eine lineare Differentialgleichung eingesetzt, wird eine sehr gute Annäherung – auf Kosten eines höheren Berechnungsaufwandes – an die analytische Funktion erreicht.
Einfache Differenzengleichungen mit einer Variablen vom Typ
Eine Differenzengleichung ist eine diskrete Berechnungsvorschrift für die
Glieder einer rekursiv definierten Folge. Sie enthält Werte einer Variablen
zu verschiedenen Zeitpunkten. Aus einem Element der Folge wird das nächste
Folgeglied errechnet. Für die Berechnung der Folgeglieder wird immer ein
Anfangswert  benötigt, anderenfalls entsteht eine Vielzahl von Lösungen.
benötigt, anderenfalls entsteht eine Vielzahl von Lösungen.
Es handelt sich hier bei diesem Abschnitt nicht um eine Approximation an einen Verlauf einer durch Differentialgleichungen vorgegebenen mathematischen Funktion, sondern die nachfolgend dargestellten Differenzengleichungen ergeben sich durch die Aufgabenstellung. Dabei wird bei den Folgegliedern unterschieden:
- Bei der arithmetischen Folge wächst oder fällt jedes Folgeglied um einen festen Betrag.
- Die allgemeine Form einer homogenen linearen Differenzengleichung 1.
Ordnung lautet:
- Dabei ist
eine Konstante. Die Schrittweite
ist eine konstante Zeitdifferenz zwischen den Folgegliedern. Diese
Berechnung mit einer arithmetischen Folge ist sehr einfach. Beispiel: Mit
einer Spardose wird monatlich ein konstanter Betrag angespart. Zinsen gibt
es dafür nicht.

- Bei der exponentiellen Folge wächst oder fällt jedes Folgeglied um einen relativen Anteil.
- Beispiel: Gegeben sei eine homogene Differenzengleichung folgender
Schreibweise:

- Diese Gleichung kann nach Gleichungsumstellungen in verschiedenen Formen
gleichwertig dargestellt werden:


Diese Form der Differenzengleichungen wird gerne für einfache
Aufgabenstellungen wie Zinseszinsberechnung, zeitliche Entwicklung der
Bevölkerungszahl, gebremstes Wachstum, Aufwärmen oder Abkühlen von
Flüssigkeiten, Entleerung von Behältern (mit und ohne Reibung) und andere
verwendet. Die Berechnung dieser Aufgaben ist exakt und kann durch Berechnung
der einzelnen Folgeglieder tabellarisch für die Folge
durchgeführt werden.
Für die exponentielle Folge kann eine Gleichung mit dem sogenannten
Wachstumsfaktor als Basis für eine exponentielle Funktion erstellt werden, der
die Berechnung einzelner Folgen
für ein beliebiges
erlaubt.
Beispiel der Berechnung einer Folge:
Aus der nachfolgenden Differenzengleichung 1. Ordnung werden die Folgegleichungen bestimmt:
 .
.
Folgegleichungen mit dem Anfangswert  :
:



Die Differenz  der errechneten Folgeglieder ist nicht konstant. Die Werte der Folgeglieder
nehmen einen exponentiellen Verlauf. Die Berechnung weiterer Folgeglieder kann
in dieser Weise für beliebige Werte von
tabellarisch erfolgen.
der errechneten Folgeglieder ist nicht konstant. Die Werte der Folgeglieder
nehmen einen exponentiellen Verlauf. Die Berechnung weiterer Folgeglieder kann
in dieser Weise für beliebige Werte von
tabellarisch erfolgen.
Aus dieser einfachen Differenzengleichung mit Hilfe der Folgeglieder  und
und  lässt sich das Bildungsgesetz für ein beliebiges nummeriertes Folgeglied
erraten und bilden. Damit gilt für diesen Anwendungsfall der Faktor vor
lässt sich das Bildungsgesetz für ein beliebiges nummeriertes Folgeglied
erraten und bilden. Damit gilt für diesen Anwendungsfall der Faktor vor  als Basis der Exponentialfunktion und wird als Wachstumsfaktor bezeichnet.
als Basis der Exponentialfunktion und wird als Wachstumsfaktor bezeichnet.

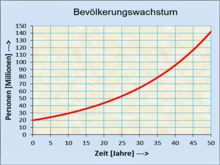
Beispiel einer Differenzengleichung zur numerischen Berechnung des Bevölkerungswachstums
-
Gegeben:
- Stand der Bevölkerung eines Staates am Jahresanfang:
 Millionen.
Millionen. - Konstante Geburtenrate nach Jahresende pro Jahr:
 %
%
- Vernachlässigung: in den Anfangsjahren der neuen Geburtenjahrgänge sind keine Nachkommen möglich.
- Konstante Sterberate nach Jahresende pro Jahr:
 %
% - Die Schrittweite beträgt
 Jahr
Jahr - Gesucht: Entwicklung der Bevölkerung nach 50 Jahren.
Gesucht:
- Differenzengleichung zur Bestimmung des Bevölkerungswachstums,
- Tabellarische Bildung der Folgegleichungen,
- Stand der Bevölkerung nach 50 Jahren,
- Wachstumsfaktor.
Form der Differenzengleichung:
- Anfangswert
[Millionen] im Jahr Null mit
 ,
, - Bereinigte Geburtenrate
 [%].
[%].
- Die tabellarische Entwicklung der Folgeglieder pro Zeiteinheit
lautet:
Jahr
kBevölkerung 
[Millionen]

[Millionen]0 20 
20 1 20 

2 

3 


50 


 .
.
 ist hier der Wachstumsfaktor.
ist hier der Wachstumsfaktor. Die Ergebnisse der Folgegleichungen ergeben Stützstellen mit potenziellem Wachstum.
- Stand der Bevölkerung eines Staates am Jahresanfang:

Anmerkung: Ein mit dieser linearen Differenzengleichung berechnetes ungebremstes Wachstum wird es in der Praxis nicht geben, weil andere Einflüsse wie z.B. Nahrungsmittelknappheit dagegen wirken.
Beispiel einer numerischen Berechnung der Kapitalentwicklung mit Zinseszins
Modell: Differenzengleichungen vom Typ .
Bei der Zinseszinsberechnung handelt es sich um eine konstante Zunahme der jährlichen Zinsen bezogen auf den jeweiligen aktuellen angesparten Betrag einer Folge. Die Kapitalentwicklung vom Anfangskapital über die kommenden Jahre nimmt einen progressiven Verlauf.
-
Gegeben: Anfangswert = Kapital
 = 1000 €; Zins:
= 1000 €; Zins:  = 2 % pro Jahr am Jahresende,
= 2 % pro Jahr am Jahresende,
Laufzeit = 20 Jahre, Schrittweite
= 1 Jahr.
= 20 Jahre, Schrittweite
= 1 Jahr. Gesucht:
- Differenzengleichung,
- Tabellarische Bildung der Folgeglieder,
- Endkapital,
- Wachstumsfaktor.
Differenzengleichung aufgestellt:
Wachstumsfaktor:

Aktuelle Formelzeichen eingesetzt:
 €.
€.
- Die tabellarische Entwicklung der Folgeglieder pro Zeiteinheit
lautet:
-
Jahr
hKapital [€] 
Kapital [€]
0 1000 1000 + 1000 * 0,02 * 0 = 1000 1 1000 1000 + 1000 * 0,02 * 1 = 1020 2 1020 1020 + 1020 * 0,02 * 1 = 1040,40 3 1040,40 1020 + 1040 * 0,02 * 1 = 1061,208
19 1428,2462 1428,2462 * 0,02 * 1 = 1456,8112 20 1456,8112 1456,8112 * 0,02 * 1 = 1485,9474
Zum Vergleich, die Zinseszinsformel mit dem Zinssatz p und Anzahl n=20 (Jahre) der Zeiträume lautet:
 €.
€.

Differenzengleichungen für lineare Übertragungssysteme als Funktion der kontinuierlichen Beziehung ![{\displaystyle y(t)=f[u(t),t]}](/svg/8b74dce57b6c9a6c00916c17defbd78fdf671b29.svg)
Bei linearen Übertragungssystemen, die durch eine gewöhnliche Differentialgleichung mit konstanten Koeffizienten beschrieben werden, ergibt sich über die Anwendung der Laplace-Transformation eine Übertragungsfunktion G(s). Durch Ermittlung der Nullstellen im Zähler und Nenner der Übertragungsfunktion lässt sich über die Polynomdarstellung eine Faktorendarstellung erreichen. Durch die inverse Laplace-Transformation ergeben sich mit Hilfe des Laplace-Differentiationssatzes Differentialgleichungen 1. und 2. Ordnung als phasenminimale Elementarsysteme. Je nach Ordnung der gewöhnlichen Differentialgleichung existieren nur sechs phasenminimale unterschiedliche Elementarsysteme, die einfach oder mehrfach vorkommen kennen.
Aus den Elementarsystemen 1. und 2. Ordnung
lassen sich über die zugehörigen Differentialgleichungen
Differenzengleichungen entwickeln.
Grundlagen der linearen dynamischen Übertragungssysteme
Definition dynamisches System: Ein dynamisches System ist eine abgegrenzte zeitabhängige Funktionseinheit, die durch ihre Signaleingänge und Signalausgänge in einer Wechselwirkung mit der Umwelt steht. Das System kann beispielsweise ein mechanisches Gebilde, ein elektrisches Netzwerk aber auch ein biologischer Vorgang oder ein Bestandteil der Volkswirtschaft sein. Es hat mindestens einen Signaleingang und einen Signalausgang.
Dynamische Systeme werden mit Hilfe mathematischer Werkzeuge als Modelle
eines realen Übertragungssystems beschrieben. Damit lässt sich für gegebene
Eingangssignale der Verlauf der Ausgangssignale von einem bestimmten
Zeitpunkt  für
für  bestimmen. Ebenso eignen sich die Modelle zur Systemanalyse.
bestimmen. Ebenso eignen sich die Modelle zur Systemanalyse.
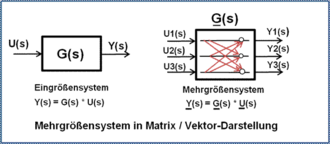 eines linearen dynamischen Ein- und Mehrgrößensystems.
eines linearen dynamischen Ein- und Mehrgrößensystems.Ein technisches dynamisches System enthält einen oder mehrere Energiespeicher, die konzentriert oder räumlich verteilt angeordnet sind. Häufig werden bei Systemberechnungen zur Vereinfachung konzentrierte Energiespeicher angenommen. Systembeispiele: Feder-Masse-Dämpfungssystem, Elektrischer Schwingkreis.
Das Ausgangs- Eingangsverhalten technische Systeme können sich zeitabhängig, zeitunabhängig, linear, nichtlinear, kontinuierlich, diskontinuierlich, zeitinvariant, zeitvariant und totzeitbehaftet verhalten. Zu deren Berechnung müssen verschiedene Methoden der linearen und nichtlinearen numerischen Berechnung kombiniert werden.
Ferner können die internen Energiespeicher Anfangswerte enthalten, wenn
das Signalverhalten eines Systems zu einem bestimmten Zeitpunkt  innerhalb eines Einschwingvorgangs für
innerhalb eines Einschwingvorgangs für  betrachtete werden sollen.
betrachtete werden sollen.
In der linearen Systemtheorie ist es eine willkommene Tatsache, dass
praktisch alle vorkommenden regulären (stabilen) Übertragungsfunktionen
von Übertragungsgliedern auf 6 Grundformen (ohne Totzeit) geschrieben bzw.
zurückgeführt werden können. Diese Übertragungsglieder wurden aus einer
gewöhnlichen Differentialgleichung höherer Ordnung mittels
Laplace-Transformation bestimmt und haben integrierendes, differenzierendes
und asymptotisches zeitverzögerndes Verhalten.
Übertragungsfunktionen der Verzögerungssysteme mit konjugiert komplexen Polen im Nennerpolynom lassen sich algebraisch nicht aufspalten und sind damit Systeme 2. Ordnung.
Systeme mit konjugiert komplexen Polen im Zählerpolynom der Übertragungsfunktion, d.h. differenzierendes Verhalten 2. Ordnung, haben in der Filtertechnik eine Bedeutung.
Dieses System  -Glied:
-Glied:
 ist nicht in der Tabelle aufgeführt.
ist nicht in der Tabelle aufgeführt.
Ein in der Systemtheorie häufig auftretendes Übertragungssystem ist das
Totzeitsystem  .
Es ist kein lineares System, es kann aber numerisch leicht behandelt werden.
.
Es ist kein lineares System, es kann aber numerisch leicht behandelt werden.
Damit bestehen praktisch nur die 5 tabellarisch aufgeführten zeitabhängigen Systeme (ohne Totzeit) einfach oder mehrfach, die in der Praxis auftreten können. Sogenannte nichtreguläre Systeme (Nichtphasenminimum-Systeme) sind instabile Systeme. Auch sie können numerisch behandelt werden.
Tabelle wichtiger regulärer (phasenminimaler) Übertragungsfunktionen in Zeitkonstanten-Darstellung:
| Übertragungsfunktion G(s) = |
 |
 |
 |
 |
 |
 |

|
|---|---|---|---|---|---|---|---|
| Sprungantwort
(Übergangsfunktion) |
 |
 |
 |
 |
 |
 |
 |
| Benennung | P-Glied | I-Glied | D-Glied | PD1-Glied | PT1-Glied | PT2-Glied | Totzeitglied |
Durch die inverse Laplace-Transformation von Übertragungsfunktionen 1.
Ordnung
entstehen gewöhnliche Differentialgleichungen 1. Ordnung, die im
nachfolgenden Abschnitt in Differenzengleichungen überführt werden. Das
dargestellte Totzeitglied ist kein phasenminimales Übertragungsglied.
Eulerverfahren für Differenzengleichungen linearer und nichtlinearer Übertragungssysteme
Im technischen Bereich der Ingenieurwissenschaften beschreiben
Differenzengleichungen zeitdiskret das spezifische Zeitverhalten linearer Übertragungssysteme
für ein kleines Zeitintervall
die Signaländerungen des Systemausgangs  (vereinfachte Schreibweise )
als Funktion des betreffenden kontinuierlichen Teilsystems (Linearfaktoren)
in Abhängigkeit der Systemparameter und des Eingangssignals .
(vereinfachte Schreibweise )
als Funktion des betreffenden kontinuierlichen Teilsystems (Linearfaktoren)
in Abhängigkeit der Systemparameter und des Eingangssignals .
Das einfachste numerische Verfahren der Berechnung des Ausgangssignals
eines linearen Übertragungssystems als Funktion des Eingangssignals
ist das sogenannte explizite Eulerverfahren (auch Euler-Vorwärtsverfahren,
Streckenzugverfahren, Rechteckverfahren, Tangentenverfahren genannt), bei
dem durch wiederholte Berechnungen für ein kleines Zeitintervall
eine Annäherung an die analytische Funktion des Systems durchgeführt
wird.
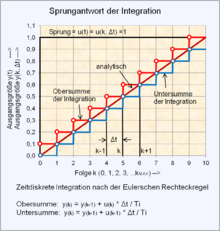
Die numerische Integration einer monoton steigenden analytischen Funktion
für ein Zeitintervall entspricht der Fläche des berechneten Ausgangssignals
einer beliebigen Folge für die Zeit ,
also  .
Je nach verwendetem Verfahren der numerischen Annäherung an die rechte oder
linke Intervallgrenze der Folge
.
Je nach verwendetem Verfahren der numerischen Annäherung an die rechte oder
linke Intervallgrenze der Folge  spricht man von der Annäherung als Obersumme oder Untersumme der
Integration.
spricht man von der Annäherung als Obersumme oder Untersumme der
Integration.
Die Funktion einer einfachen Integration wird durch die Summe der Folgen
des Produktes  nachgebildet:
nachgebildet:

Differenzengleichungen für eine endliche Folge ![{\displaystyle k=[0,1,2,3,\dotsc ,k_{\mathrm {(max)} }]}](/svg/b1b09c6ca53b7fc00386d55471d1d79e427ea2bd.svg) berechnen die Integrationsgrenzen eines bestimmten Integrals, nämlich
bis
berechnen die Integrationsgrenzen eines bestimmten Integrals, nämlich
bis  .
.
Differenzengleichungen entstehen durch Einsatz eines
Differenzenquotienten anstelle des Differentialquotienten der
Differentialgleichung, die das System beschreibt. Durch fortlaufende
Berechnung ausgehend vom Stützpunkt mit dem Anfangswert ![{\displaystyle [y_{(0)},t_{(0)}]}](/svg/6ba3b3860799278a1a90d0bb50c5717289a2e83b.svg) und Berechnung des nächsten Stützpunktes
und Berechnung des nächsten Stützpunktes ![{\displaystyle [y_{(1)},t_{(1)}]}](/svg/816dcd93d901a44c2524bfc4bf1068cc571ac2ab.svg) durch
durch ![{\displaystyle f[System(t),t,u(t)]}](/svg/2d265f66f9af7e5926e51d498ea6f6a91b73f054.svg) ergibt sich durch Interpolation der Stützstellen ein geschlossener
Funktionsverlauf für die Stützpunkte
ergibt sich durch Interpolation der Stützstellen ein geschlossener
Funktionsverlauf für die Stützpunkte ![{\displaystyle [y_{(k=0)}{\text{ bis }}y_{(k=max)}]}](/svg/d85f4ec0ea0bcfee7dda2282afa6d8358c2b31af.svg) im Abstand
in Annäherung an den analytischen Verlauf des Übertragungssystems. Zur
grafischen Darstellung des Funktionsverlaufs
im Abstand
in Annäherung an den analytischen Verlauf des Übertragungssystems. Zur
grafischen Darstellung des Funktionsverlaufs  wird die Interpolation der Stützstellen selten benötigt.
wird die Interpolation der Stützstellen selten benötigt.
Differenzengleichungen für lineare Systeme
Die numerische
Gesamtlösung des Systemverhaltens erfolgt rekursiv
über viele Berechnungsfolgen ![{\displaystyle k=[0;1;2;3;\dotsc ;k_{\mathrm {(max)} }]}](/svg/74784d6fdce0a467bf97d4cca9dfe3cc1df629f1.svg) in je kleinen meist konstanten Zeitintervallen als Stützstellen in
Annäherung an die analytische Funktion.
in je kleinen meist konstanten Zeitintervallen als Stützstellen in
Annäherung an die analytische Funktion.
Jede aktuelle Berechnungsfolge (bei Euler-Rückwärts)
bezieht sich bei Differenzengleichungen 1. Ordnung auf das vorhergehende
Ergebnis
und addiert die Änderung des Eingangssignals u(k) unter
Berücksichtigung der Systemübertragungsfunktion und des Zeitintervalls .
Lineare Übertragungssysteme höherer Ordnung werden pro Folge
hintereinander durch die systembeschreibenden Differenzengleichungen 1.
Ordnung für
pro Zeile in tabellarischer Darstellung berechnet. Dabei wird in jeder Folge
(Zeile) pro Teilsystem 1. Ordnung die Ausgangsgröße
zu einer Eingangsgröße
des nächsten Teilsystems, vorausgesetzt, es handelt sich um eine
Reihenschaltung der Teilsysteme. Diese Anordnung der Differenzengleichungen
kann auch mit Totzeitsystemen und nichtlinearen Systemen kombiniert werden.
Das Ergebnis ist eine tabellarisch im Rechner gespeicherte Folge von
Berechnungswerten (Stützstellen) mehrerer Systeme 1. Ordnung im zeitlichen
Abstand
pro Zeile. Die Werte der Stützstellen mehrerer Teilsysteme lassen sich in
Abhängigkeit von dem Eingangssignal
und der diskreten Zeit grafisch für die Teilsysteme und des Gesamtsystems
darstellen.
Die numerische Berechnung erlaubt tabellarisch und grafisch eine völlige Durchsicht des inneren Bewegungsablaufs dynamischer Übertragungssysteme.
Die Genauigkeit der numerischen Berechnung eines dynamischen Systems mit
dem Euler-Verfahren steigt linear mit dem kleiner werdenden Zeitintervall
.
Die Genauigkeit wird begrenzt durch steigende Folgen
mit steigenden Rundungsfehlern.
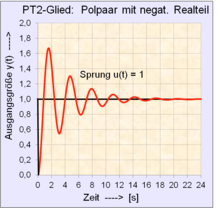
Instabile nicht phasenminimale Übertragungssysteme
Die Ausgangssignale solcher Übertragungssysteme streben monoton einem
unendlich hohen Wert an. Diese Übertragungssysteme 1. Ordnung werden
umgangssprachlich – sachlich nicht korrekt – auch als instabile  -Glieder
benannt. Diese instabilen nicht phasenminimalen elementare
Übertragungsfunktionen enthalten ein negatives Zeichen in der
Übertragungsfunktion
und in der zugehörigen Differenzengleichung. Nicht phasenminimale
Übertragungsglieder 2. Ordnung als instabile
-Glieder
benannt. Diese instabilen nicht phasenminimalen elementare
Übertragungsfunktionen enthalten ein negatives Zeichen in der
Übertragungsfunktion
und in der zugehörigen Differenzengleichung. Nicht phasenminimale
Übertragungsglieder 2. Ordnung als instabile  Glieder
streben oszillierend mit einer bis ins Unendliche steigenden Amplitude an.
Die Übertragungsfunktion
enthält ebenfalls ein Minuszeichen und in der zugehörigen
Differenzengleichung.
Glieder
streben oszillierend mit einer bis ins Unendliche steigenden Amplitude an.
Die Übertragungsfunktion
enthält ebenfalls ein Minuszeichen und in der zugehörigen
Differenzengleichung.
Nichtlineare Systeme
Relativ einfache Übertragungssystem-Strukturen mit nichtlinearen Elementen sind durch konventionelle Rechenmethoden im kontinuierlichen Zeitbereich nicht mehr geschlossen lösbar. Mit handelsüblichen Personal-Computern kann das Verhalten beliebig vermaschter Systemstrukturen mittels numerischer Berechnung relativ einfach ausgeführt werden. Dabei sind für die Anwendung von Differenzengleichungen relativ geringe mathematische Kenntnisse erforderlich.
Treten bei linearen Übertragungssystemen
zusätzlich Begrenzungseffekte, nichtlineares Verhalten oder Totzeitverhalten
auf, kann das zeitliche Verhalten des Systems nur numerisch mit der
diskreten Zeit
berechnet werden. Alternativ können mit selbst erstellten beliebigen
Rechenprogrammen des einfachen Euler-Verfahrens mit Differenzengleichungen
in Kombination mit logischen Operatoren sehr effiziente Simulationen
dynamischer Systeme mit nichtlinearen Elementen durchgeführt werden.
Ist einer Übertragungsfunktion G(s) die transzendente Funktion des
Totzeitgliedes  multiplikativ angehängt, dann kann das Gesamtsystem nicht mehr algebraisch
behandelt werden. [transzendent (Mathematik): über das algebraische
hinausgehend].
multiplikativ angehängt, dann kann das Gesamtsystem nicht mehr algebraisch
behandelt werden. [transzendent (Mathematik): über das algebraische
hinausgehend].
Für Totzeitsysteme existiert in der Tabellenkalkulation ein Befehl unter dem Oberbegriff "Nachschlagen und verweisen"
![{\displaystyle INDEX\,[Bezug,\ Zeile,\ Spalte,\ Bereich]}](/svg/26e4230572e6de8d2f59cbde8d82471984318912.svg) (z.B.
(z.B.  ),
),
der in einer Spalte einen Bezug zu einer bereits zurückliegenden Zelle
macht. Die Totzeit
muss nur in Folgewerte  zugeordnet werden.
zugeordnet werden.
Nichtlineare Systeme ohne Zeitverhalten sind je nach Funktion Unikate, für die selten
kommerzielle Programme zur Verfügung stehen. Handelt es sich um unstetige
Funktionen (z.B. Signale die die Zustände  oder
oder  annehmen), können diese mit logischen Funktionen mit sogenannten
annehmen), können diese mit logischen Funktionen mit sogenannten  definiert werden.
definiert werden.
Signalbegrenzungen (z.B. mechanische Anschläge) verhalten sich ebenfalls nichtlinear. Auch sie können mit den genannten logischen Funktionen berechnet werden.
Für nichtlineare stetige Funktionen müssen notfalls eigene Tabellenwerte berechnet werden.
Die nachfolgende Berechnung und Aufstellung der Differenzengleichungen
gilt für alle phasenminimalen 4 Formen der Übertragungssysteme 1. Ordnung.
Diese linearen Systeme kommen einfach und mehrfach in größeren technischen
Anlagen vor. Das -Schwingungsglied
lässt sich einfach über einen Hilfsregelkreis mit einem I-Glied und
PT1-Glied nachbilden (Siehe Abschnitt "Differenzengleichungen höherer
Ordnung").
Differenzengleichung der Integration (I-Glied)
Die Übertragungsfunktion lautet:

Die zugehörige Differenzialgleichung lautet:

Der Differenzenquotient wird an Stelle des Differenzialquotienten  eingesetzt:
eingesetzt:

Damit lautet die nach
umgestellte Differenzengleichung des I-Gliedes:

Differenzengleichung des Differenzierers (ideales D-Glied)
Mit der Zeitdiskretisierung wird der Übergang einer Differenzialgleichung in eine Differenzengleichung von einer zeitkontinuierlichen Systembeschreibung in eine Systembeschreibung mit kleinen Zeitintervallen Δt der diskreten Zeit geschaffen. Der Differentialquotient wird durch einen Differenzenquotient ersetzt.
Die Übertragungsfunktion des idealen Differenzierers lautet:

Differenzialgleichung des idealen Differenzierers:

Der Differenzialquotient  wird durch einen Differenzenquotient mit der Anpassung an die linke
Intervallgrenze ersetzt. Für eine Anpassung an die rechte Intervallgrenze
steht der Wert u(k+1) nicht zur Verfügung.
wird durch einen Differenzenquotient mit der Anpassung an die linke
Intervallgrenze ersetzt. Für eine Anpassung an die rechte Intervallgrenze
steht der Wert u(k+1) nicht zur Verfügung.

- Differenzengleichung der Differentiation (Ideales D-Glied)

Differenzengleichung der Verzögerung (PT1-Glied)

- Übertragungsfunktion des PT1-Gliedes

- Zugehörige Differenzialgleichung

Der Differenzialquotient der Differenzialgleichung wird durch den Differenzenquotient ersetzt mit folgendem Ansatz:

Diese Gleichung wird nach y(k) aufgelöst.

Die Differenzengleichung des PT1-Gliedes lautet:

Differenzengleichung des PT1-Gliedes in vereinfachter Schreibweise mit identischer mathematischer Funktion:

Differenzengleichung der Proportional-Differenzialfunktion (Ideales PD1-Glied)
Übertragungsfunktion PD1-Glied:

Die zugehörige Differenzialgleichung lautet:

Der Differenzialquotient der Differenzialgleichung wird ersetzt durch den Differenzialalgorithmus mit folgendem Ansatz:

Die Differenzengleichung des idealen PD1-Gliedes lautet:
![y_{{(k)}}=K_{{PD}}\cdot [u_{{(k)}}+(u_{{(k)}}-u_{{(k-1)}})\cdot {\frac {T_{V}}{\Delta t}}]](/svg/7507a8de434e24028690613f0930b721e5e834c9.svg)
Anmerkung: Differenzierende Systeme ohne sogenannte parasitäre Zeitkonstanten von PT1-Gliedern lassen sich als Hardware technisch nicht herstellen. Die parasitäre Zeitkonstante ist wesentlich kleiner, als die Zeitkonstante des Differenzierers. Dennoch kann man numerisch mit idealen Differenzierern rechnen, dabei ist die Größe des Impulses der Sprungantwort umgekehrt proportional der Größe von Δt. Erst bei der energetischen Bereitstellung als Stellgröße in einem Regelkreis ergibt sich durch die nachgeschaltete Hardware eine unvermeidbare Zeitverzögerung.
Tabelle der Differenzengleichungen (Euler-Rückwärts) der Elementarsysteme G(s) erster Ordnung
| Elementarsysteme | P-Glied | I-Glied | D-Glied | PD1-Glied | PT1-Glied |
|---|---|---|---|---|---|
| Übertragungsfunktion |  |
 |
 |
 |

|
Differenzengleichungen
|
 |
 |
![[u_{(k)}-u_{(k-1)}]\cdot {\frac {T}{\Delta t}}](/svg/21f1093aa7e996627ab57c244391bff463bba901.svg) |
![K_{{PD1}}\cdot \left[u_{{(k)}}+(u_{{(k)}}-u_{{(k-1)}})\cdot {\frac {T}{\Delta t}}\right]](/svg/4964e48c7a70c77f927b08b345e198c4803973e4.svg) |
![{\displaystyle y_{(k-1)}+[K_{PT1}\cdot u_{(k)}-y_{(k-1)}]\cdot {\frac {\Delta t}{T+\Delta t}}}](/svg/e9b2775ab1319b5552521c2fd7d20904f1b683de.svg)
|
(Mit K = Verstärkungsfaktor,
= aktuelle Ausgangsgröße,
= vorherige Ausgangsgröße, T = Zeitkonstante,
= aktuelle Eingangsgröße)
Diese Differenzengleichungen von Elementarsystemen können beliebig
multiplikativ, additiv oder zurückgekoppelt vermascht sein. Jede Gleichung
eines Gesamtsystems wird hintereinander berechnet. Bei Reihenschaltungen von
Teilsystemen ist die berechnete Ausgangsgröße
die Eingangsgröße
des folgenden Teilsystems. Bei Parallelschaltungen von Teilsystemen werden
die Ergebnisse der Ausgangsgrößen additiv zusammengeführt.
Differenzengleichungen als Funktion der Ober- und Untersumme
In der numerischen Mathematik bedeuten die Flächen der Rechteckapproximation an eine gegebene analytische Funktion dann als Obersumme, wenn die Oberkante der Rechtecke oberhalb der analytischen Funktion anstößt. Umgekehrt handelt es sich um die Untersumme, wenn die Oberkante der Rechtecke unterhalb der analytischen Funktion anstößt. Für die numerische Berechnung interessiert nicht die Fläche der Rechtecke, sondern die Lage des Verlaufs der Stützstellen der Oberkante der Rechtapproximation.
Ein Wert einer Differenzengleichung nach der Obersumme zum Zeitpunkt
 ist differenzierbar. Der Funktionsunterschied der Obersumme zur Untersumme
bedeutet beispielsweise, dass ein Eingangssignal als einzelner
ist differenzierbar. Der Funktionsunterschied der Obersumme zur Untersumme
bedeutet beispielsweise, dass ein Eingangssignal als einzelner  -Impuls
zum Zeitpunkt t = 0 und Folge k = 0 in einem zeitdiskreten dynamischen
System für den Zeitraum
– also zwischen
und
-Impuls
zum Zeitpunkt t = 0 und Folge k = 0 in einem zeitdiskreten dynamischen
System für den Zeitraum
– also zwischen
und  – wirksam wird. Differenzengleichungen nach der Untersumme können diesen
-Impuls
nicht erfassen.
– wirksam wird. Differenzengleichungen nach der Untersumme können diesen
-Impuls
nicht erfassen.
Die Wertefolge der mit Differenzengleichungen berechneten Ausgangsfolge der Funktion der Untersumme unterscheiden sich von denen der Obersumme, dass die Wertefolge der Untersumme um einen Folgeschritt verzögert ist.
Differenzengleichungen höherer Ordnung
Differenzengleichungen höherer Ordnung entstehen dadurch, dass die Differentialquotienten einer Differentialgleichung höherer Ordnung durch Differenzenquotienten höherer Ordnung näherungsweise ersetzt werden. Die Anwendung einer solchen Differenzengleichung kann algebraisch sehr aufwendig werden.
Zeitkontinuierliche lineare Systeme werden im Zeitbereich durch die
gewöhnlichen Differentialgleichungen n-ter Ordnung mit konstanten
Koeffizienten für  beschrieben. Dabei sind n und m die höchsten Ableitungen der Ausgangssignale
und Eingangssignale .
beschrieben. Dabei sind n und m die höchsten Ableitungen der Ausgangssignale
und Eingangssignale .
Differenzengleichungen können auch aus gewöhnlichen
Differentialgleichungen höherer Ordnung entwickelt werden, wenn ab dem
Zeitpunkt  die letzten vergangenen Ausgangs-Wertefolgen mit
die letzten vergangenen Ausgangs-Wertefolgen mit ![k=[-1\to -n]](/svg/a01d3fff736891fdc4822b7d11fdb875a9b31237.svg) und die Eingangs-Wertefolgen mit
und die Eingangs-Wertefolgen mit ![k=[-1\to -m]](/svg/1f7cd54355a41d43102cd7bc489c62994f90d30d.svg) bekannt sind.
bekannt sind.
Eine gegebene gewöhnliche Differentialgleichung wird durch den
Koeffizienten  dividiert, um
freistellen zu können. Diese Form der Differentialgleichung wird
entsprechend den dargestellten Koeffizienten wie folgt neu geordnet.
dividiert, um
freistellen zu können. Diese Form der Differentialgleichung wird
entsprechend den dargestellten Koeffizienten wie folgt neu geordnet.

Diese Differentialgleichung kann in eine Differenzengleichung überführt werden:
- Als diskrete Zeit wird
 festgelegt.
festgelegt.  wird vereinfacht als
wird vereinfacht als  geschrieben und entspricht der aktuellen Funktion des Folgegliedes.
geschrieben und entspricht der aktuellen Funktion des Folgegliedes.- Die kontinuierlichen Systemgrößen
 und
und  werden zeitdiskret dargestellt.
werden zeitdiskret dargestellt. - Die Ableitungen im Zeitbereich
 werden entsprechend der Ordnung durch Differenzenquotienten
werden entsprechend der Ordnung durch Differenzenquotienten  der zugehörigen Ordnung ersetzt.
der zugehörigen Ordnung ersetzt.
- Jede Ableitung der Systemgrößen wird im zeitdiskreten Bereich entsprechend der Ordnung als zurückliegende Folgeglieder der Eingangs- und Ausgangsfolgen k-1 bis k-n oder k-m berücksichtigt.
Daraus folgt die Differenzengleichung:
 .
.
Damit kann die allgemeine Form der Differenzengleichung nach
aufgelöst werden:
 .
.
Für die numerische Berechnung eines dynamischen Systems wird die
Übertragungsfunktion
oder die zugehörige Differentialgleichung benötigt. Die Umsetzung einer
systembeschreibenden Differentialgleichung in eine angenäherte
Differenzengleichung zur Beschreibung von Eingangsfolgen und Ausgangsfolgen
eines dynamischen Systems wird ermöglicht, wenn die Differentiale der
Differentialgleichung durch Rückwärts-Differenzenquotienten über die
Abtastperiode ersetzt werden.>
Die folgenden Ableitungen der Differentialquotienten in Differenzenquotienten der 1. 2. und 3. Ordnung sind gegeben:
Differenzenquotient 1. Ordnung:

Der Differenzenquotient 2. Ordnung entsteht aus Differenzen der Differenz:

Der Differenzenquotient 3. Ordnung lautet:

Nach erfolgtem Einsetzen der Differenzenquotienten in die Differenzengleichung eines dynamischen Systems lassen sich die neuen Koeffizienten aus den Koeffizienten der Differentialgleichung berechnen.
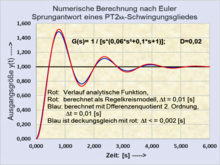
Beispiel der Entwicklung einer Differenzengleichung zur Berechnung
der Sprungantwort eines -Gliedes
mit konjugiert komplexen Polen:

Gegeben: Übertragungsfunktion im s-Bereich:
2. Ordnung zur numerischen Bestimmung des System-Zeitverhaltens.
Zugehörige Differentialgleichung nach dem Differentiationssatz der Laplace-Transformation:  und
werden in die nachfolgende Differenzengleichung eingesetzt:
freistellen zu können, Hilfsgröße
und
werden in die nachfolgende Differenzengleichung eingesetzt:
freistellen zu können, Hilfsgröße  eingeführt:
eingeführt:
Berechnungsbeispiel für einige Werte der Ausgangsfolge
mit  Sprung
Sprung  : :
|





 .
. .
. .
. .
.Diese Differenzengleichung entspricht einem Rekursionsalgorithmus eines dynamischen Systems, der schrittweise mit einem Personal-Computer gelöst werden kann.
Die rekursive Berechnung der Differenzengleichung 2. Ordnung bezieht sich
für die aktuelle Ausgangsfolge
durch Einsetzen der zurückliegenden Werte der Ausgangsfolge  und
und  in die Gleichung. Für das 1. Folgeglied der Berechnungsfolge k=0 sind die
zurückliegenden Werte der Ausgangsfolge noch nicht verfügbar und damit Null.
Die Anzahl
der Glieder der Ausgangsfolge wird durch die diskrete Zeit
und durch die gewünschte zu beobachtende Gesamtzeit des Einschwingvorgangs
bestimmt.
in die Gleichung. Für das 1. Folgeglied der Berechnungsfolge k=0 sind die
zurückliegenden Werte der Ausgangsfolge noch nicht verfügbar und damit Null.
Die Anzahl
der Glieder der Ausgangsfolge wird durch die diskrete Zeit
und durch die gewünschte zu beobachtende Gesamtzeit des Einschwingvorgangs
bestimmt.
Beispiel zur Berechnung eines  -Gliedes
durch eine einfachere Methode als Modellregelkreis:
-Gliedes
durch eine einfachere Methode als Modellregelkreis:
Nachdem bereits dargestellt wurde, dass laut Systemtheorie nur
Übertragungsfunktionen
1. und 2. Ordnung oder Produkte dieser Systeme existieren, lassen sich
PT2-Glieder (Schwingungsglieder) über Differenzengleichungen 1. Ordnung über
einen Modellregelkreis erheblich einfacher berechnen und simulieren. Dazu
werden 2 Differenzengleichungen mit je einem I-Glied und einem PT1-Glied als
offener Modellregelkreis mit einer zusätzlichen Schließbedingung der
Regelabweichung  definiert.
definiert.
Der Modellregelkreis erzwingt mit den geeigneten Parametern für das  -Glied
und das -Glied,
dass die Ausgangsgröße
einem System -Glied
(Schwingungsglied) mit konjugiert komplexen Polen entspricht.
-Glied
und das -Glied,
dass die Ausgangsgröße
einem System -Glied
(Schwingungsglied) mit konjugiert komplexen Polen entspricht.
Ein weiterer Vorteil liegt darin, dass die numerische Berechnung mit Differenzengleichungen 1. Ordnung schneller ist, als die Berechnung von Differenzengleichungen 2. Ordnung.
- Beispiel der Simulation eines -Schwingungsgliedes
mit zwei Differenzengleichungen 1. Ordnung:
-
Aufgeschnittener Modellregelkreis:

Die Übertragungsfunktion des Modellregelkreises:
 lautet in der allgemeinen Form für ein -Schwingungsglied:
lautet in der allgemeinen Form für ein -Schwingungsglied:

Durch Koeffizientenvergleich lassen sich die gewünschten Parameter
 und
und  des offenen Modellregelkreises bestimmen:
des offenen Modellregelkreises bestimmen:  = Zeitkonstante des PT2-Gliedes.
= Zeitkonstante des PT2-Gliedes. Mit diesen Parametern kann die numerische Berechnung mit den nachstehend aufgeführten Differenzengleichungen durchgeführt werden.

Mit dem Vergleich Regelabweichung = Sollwert − Istwert wird der aufgeschnittene Regelkreis geschlossen (
 = normierte Führungsgröße = 1):
= normierte Führungsgröße = 1): -
Regelabweichung:

Die beiden Differenzengleichungen der Einzelglieder lauten:
-
I-Glied:

-
PT1-Glied:
![{\displaystyle y_{(k)}=y_{(k-1)}+[u_{(k)}-y_{(k-1)}]\cdot {\frac {\Delta t}{T_{H}+\Delta t}}}](/svg/939da97299dacbdce0fb3aa3b13980637a37e01d.svg)
-
Werden diese 3 Gleichungen tabellarisch hintereinander berechnet und
jeweils das Ergebnisse der 1. Gleichung in die 2. Gleichung und dieses
Ergebnis in die 3. Gleichung eingesetzt, entsteht die Berechnungsfolge
des PT2-Gliedes mit gewählten z.B. 100 bis 1000 Folgen als
Sprungantwort. Das Verfahren der Approximation über den Modellregelkreis ist
gegenüber dem Verfahren mit dem Differenzenquotienten 2. Ordnung
vorzuziehen, weil algebraisch einfacher und
für die gleiche Genauigkeit der Approximation etwa 3-fach größer sein kann.
Genauigkeit der numerischen Berechnung des Euler-Streckenzugverfahrens
Man bezeichnet ein numerisches Verfahren als stabil, wenn die Approximationsfehler im Laufe der Berechnung nicht anwachsen.
Es sind die Verläufe der numerischen Lösung
zu unterscheiden:
- Verhalten der Exponentialfunktion zum monoton strebenden Maximum
- Für eine Auflösung von
 bzw.
bzw.  kann im Allgemeinen eine Genauigkeit mit einem Approximationsfehler
bezogen auf einen Endwert von ca. 1 % erzielt werden, wenn
kann im Allgemeinen eine Genauigkeit mit einem Approximationsfehler
bezogen auf einen Endwert von ca. 1 % erzielt werden, wenn  Folgen berechnet werden.
Folgen berechnet werden. - Liegt ein Anfangswert der Exponentialfunktion
vor, beispielsweise
 ,
der nicht bekannt ist, startet die numerische Berechnung bei
,
der nicht bekannt ist, startet die numerische Berechnung bei  .
Wird ein Funktionsendwert der Größe
.
Wird ein Funktionsendwert der Größe  betrachtet, liegt der Approximationsfehler durch den vernachlässigten
Anfangswert bei 10 %. Hat der Funktionsendwert die Größe
betrachtet, liegt der Approximationsfehler durch den vernachlässigten
Anfangswert bei 10 %. Hat der Funktionsendwert die Größe  ,
liegt der Approximationsfehler durch den vernachlässigten Anfangswert bei
1 %, dem sich der übliche Diskretisierungsfehler
,
liegt der Approximationsfehler durch den vernachlässigten Anfangswert bei
1 %, dem sich der übliche Diskretisierungsfehler  überlagert.
überlagert.
- Verhalten einer Exponentialfunktion mit asymptotischen Anstieg auf einen Endwert
- Bei dynamischen Systemen im Zeitbereich startet die numerische
Berechnung von
oder
für eine Auflösung
und erreicht asymptotisch einen Endwert in minimal
 Folgen oder beliebig mehr Folgen. Der Approximationsfehler liegt bei
1 % bezogen auf den Endwert.
Folgen oder beliebig mehr Folgen. Der Approximationsfehler liegt bei
1 % bezogen auf den Endwert. - Die Anzahl der Folgen
kann beliebig erhöht werden, um einen größeren Zeitabschnitt zu
betrachten. Der Approximationsfehler ändert sich nicht, solange
 nicht geändert wird.
nicht geändert wird. - Differenzengleichungen, welche die Obersumme in Annäherung an eine
analytische Funktion berechnen, ergeben immer einen kleinen Anfangswert
für ,
der sich aus den Parametern der Differenzengleichung ergibt. Dieser Wert
ist in der Regel kleiner als
 .
.
- Differenzengleichungen 2. Ordnung als Schwingungsglieder
- Differenzengleichungen 2. Ordnung, die dynamische Systeme im
Zeitbereich beschreiben, stellen sich für eine Dämpfung
 mit konjugiert komplexen Polen als Schwingungsglied dar. Solche Systeme
enthalten gedämpfte sinusförmige Schwingungen, die mit schnellen Anstiegs-
und Abfallgeschwindigkeiten auftreten. Für die Betrachtung der Genauigkeit
der Approximation ist maßgebend, wieviel Folgen innerhalb der ersten
Schwingung mit dem steilsten Gradienten stattfinden.
mit konjugiert komplexen Polen als Schwingungsglied dar. Solche Systeme
enthalten gedämpfte sinusförmige Schwingungen, die mit schnellen Anstiegs-
und Abfallgeschwindigkeiten auftreten. Für die Betrachtung der Genauigkeit
der Approximation ist maßgebend, wieviel Folgen innerhalb der ersten
Schwingung mit dem steilsten Gradienten stattfinden. - Die größte Änderungsgeschwindigkeit einer gedämpften sinusförmigen Schwingung liegt beim 1. Nulldurchgang und vermindert sich mit jedem weiteren Nulldurchgang.
- In grober Annäherung an die analytische Funktion mit der Asymptote 1
sollte der ersten positiven Halbwelle eine Auflösung von mehr als 100
Folgen mit
 gegeben werden. Der zu erwartende maximale Approximationsfehler für
gegeben werden. Der zu erwartende maximale Approximationsfehler für  liegt bei ca. 1 %.
liegt bei ca. 1 %. - Die Anzahl der Folgen für einen zu betrachtenden Zeitraum
 hat keinen Einfluss auf die Genauigkeit.
hat keinen Einfluss auf die Genauigkeit.
z-Transformation für Abtastsysteme linearer Übertragungssysteme
Durch die z-Transformation können aus impulsförmig abgetasteten Signalen und Differenzengleichungen gebrochen rationale Funktionen als z-Übertragungsfunktion entstehen. Damit vereinfachen sich insbesondere in der Regelungstechnik durch z-Verschiebungssätze die Überführung in eine neue erweiterte Differenzengleichung und damit Festlegung des Regelalgorithmus für einen Mikrorechner.
Grundlagen der z-Transformation für lineare Abtastsysteme (Online Prozess)
Die Anwendung der z-Transformation bezieht sich ausschließlich auf Digitalrechner-geführte Anlagen, die Steuer- und Regelungstechnik und digitale Filter.
Mit
 wird die s-Ebene auf die z-Ebene abgebildet.
wird die s-Ebene auf die z-Ebene abgebildet.Die z-Transformation ist eine mathematische Methode, um zyklisch abgetastete kontinuierliche Signale im Zusammenhang mit dynamischen Systemen im z-Bereich berechenbar zu machen (vgl. Matched-Z-Transformation). Sie ist eine Transformation von Abtastfolgen, die im Vergleich zur Behandlung von Differentialgleichungen ähnliche Eigenschaften aufweist, wie die Laplace-Transformation.
Mit den Methoden der z-Transformation lassen sich Differenzengleichungen von abgetasteten Signalfolgen ermitteln.
Sollen die analogen Signale dynamischer Systeme in einem Computer
bearbeitet werden, ist eine Digitalisierung
der Signale erforderlich. Dabei werden die analogen Signale im Rhythmus der
Abtastzeit
abgetastet und mittels AD-Wandlern
digitalisiert.
Bei dynamischen Systemen mit Signalabtastung ist die Ausgangswertefolge
mit der Folge ![{\displaystyle k=[0;1;2;3;\dotsc ]}](/svg/e50d31372388a35e82193d412933aa27fea0c0c5.svg) eine unbegrenzte Folge. Im Gegensatz dazu handelt es sich bei der Simulation
eines Systemverhaltens mit der Berechnungsfolge
mit der diskreten Zeit
um eine begrenzte Folge, die eine Nummerierung der Werte darstellt.
eine unbegrenzte Folge. Im Gegensatz dazu handelt es sich bei der Simulation
eines Systemverhaltens mit der Berechnungsfolge
mit der diskreten Zeit
um eine begrenzte Folge, die eine Nummerierung der Werte darstellt.
Die Eingangsfolgen werden durch einen Mikrocomputer zu Ausgangsfolgen
berechnet. Diese Abtastzeit
ist eine reale Zeit.
Entsprechend den Eigenschaften der z-Transformation  ergeben sich folgende Operationen:
ergeben sich folgende Operationen:
- Spezielle Rechenoperationen:
- Rechtsverschiebung, Linksverschiebung, Differenzensatz, Summensatz usw., zurückliegende Berechnungsfolgen sind zu speichern.
- Überführung des dynamischen Systems als z-Übertragungsfunktion,
- Eigenschaften des z-Bildbereichs ähnlich der Laplace-Transformation:
- z-Blockdarstellung von reihen- und parallelgeschalteten Systemen,
Pol-Nullstellenzerlegung, Stabilitätsbetrachtung, Berechnungsregeln und
die Überführung vom z-Bildbereich in den diskreten Zeitbereich .
Definition Signalabtastung:
Bei einem gegebenen Hardwaresystem wird das Eingangssignal (z.B.
Regeldifferenz  )
im zeitlichen Abstand der Abtastzeit
abgetastet, digitalisiert und als Eingangswertefolge in einen Mikrorechner
geleitet. Meist handelt es sich bei diesem System um den Regelalgorithmus
eines Reglers als Differenzengleichung. Die Ausgangsfolge wird analogisiert
und in ein Halteglied
z.B. nullter Ordnung geleitet. Damit entsteht als Stellgröße ein
gestuftes quasi stetiges Signal, das von einer kontinuierlich wirkenden
Regelstrecke verarbeitet werden kann.
)
im zeitlichen Abstand der Abtastzeit
abgetastet, digitalisiert und als Eingangswertefolge in einen Mikrorechner
geleitet. Meist handelt es sich bei diesem System um den Regelalgorithmus
eines Reglers als Differenzengleichung. Die Ausgangsfolge wird analogisiert
und in ein Halteglied
z.B. nullter Ordnung geleitet. Damit entsteht als Stellgröße ein
gestuftes quasi stetiges Signal, das von einer kontinuierlich wirkenden
Regelstrecke verarbeitet werden kann.
Liegt für andere Anwendungen das Eingangssignal bereits als diskretes Signal vor, gilt die gleiche Prozedur mit der Digitalisierung des Eingangssignals und der Eingangsfolge. Ein Mikrorechner verarbeitet fortlaufend die Eingangsfolge zu einer Ausgangsfolge über Differenzengleichungen mit einem spezifischen Systemverhalten. Bei den Werten der Ausgangsfolge handelt es sich um digitale Signale.
Bei diesen Anwendungen ist das Zeitintervall  eine reale Zeit.
eine reale Zeit.
Differenzengleichungen können auch mit Hilfe der z-Transformation aus der z-Übertragungsfunktion entstehen.
z-Übertragungsfunktion
Wendet man den Rechtsverschiebungssatz der z-Transformation auf Differenzengleichungen an, so erhält man daraus direkt als Verhältnis der z–Transformierten von Eingangs- und Ausgangsfolge die z–Übertragungsfunktion des diskreten Systems. Zu der Anwendung mit linearen Systemen folgende Informationen:
- Die Differenzengleichungen
können ausschließlich mit Hilfe des Linearitätssatzes und
Verschiebungssatzes in den komplexen z-Bildbereich und in die
z-Übertragungsfunktionen
 überführt werden.
überführt werden. - Gegebene Übertragungsfunktionen des s-Bereiches in Verbindung mit Haltegliedern und Abtastelementen können ebenfalls mit Hilfe der z-Korrespondenztabellen als z-Übertragungsfunktion transformiert werden.
- Die z-Übertragungsfunktion lautet:
 .
.
- Die Rücktransformation von der z-Übertragungsfunktion in den zeitdiskreten Bereich als Differenzengleichung erfolgt durch den invers angewendeten Linearitätssatz und Verschiebungssatz für alle einzelnen Terme.
Anwendung der z-Übertragungsfunktion in einem Regelkreis
Siehe auch z-Transformation.
Es können sowohl abgetastete Eingangssignale u(kTA) als auch Differenzengleichungen f(kTA), die im diskreten Zeitbereich das Verhalten eines Systems (z.B. den Regelalgorithmus eines Reglers) beschreiben, als z-Übertragungsfunktionen in den z-Bereich transformiert und als algebraische Gleichungen behandelt werden.
Wird eine inverse z-Transformation der z-Übertragungsfunktionen
durchgeführt, entsteht die Lösung der zeitdiskreten Differenzengleichung
 im
im  -Bereich.
Mit Hilfe verschiedener Verfahren der Rücktransformation vom z-Bereich in
den zeitdiskreten k-Bereich ergeben sich dann als Lösung die
Differenzengleichungen des Regelalgorithmus für den diskreten Bereich
f(kTA).
-Bereich.
Mit Hilfe verschiedener Verfahren der Rücktransformation vom z-Bereich in
den zeitdiskreten k-Bereich ergeben sich dann als Lösung die
Differenzengleichungen des Regelalgorithmus für den diskreten Bereich
f(kTA).
Die typische Anwendungsprozedur der z-Transformation an einem digitalen Systems, einem digitalen Regler oder einem digitalen Filter lautet für den Regelalgorithmus wie folgt:
- Die Abtastfolge des Eingangssignals (Eingangsfolge) wird transformiert
als z-Übertragungsfunktion
 ,
, - Die Differenzengleichung
 des gewünschten Reglerverhaltens wird transformiert als
z-Übertragungsfunktion
des gewünschten Reglerverhaltens wird transformiert als
z-Übertragungsfunktion  ,
, - Die z-transformierten Systeme werden algebraisch entsprechend den z-Rechenregeln zusammengefasst,
- Mit der inversen z-Transformation des z-Produktes von Signal und Regelalgorithmus entsteht der Berechnungsalgorithmus des digitalen Reglers (Mikro Computers) wieder als Differenzengleichung.
Die Analyse und die Synthese diskreter Signale und Systeme lässt sich mit der z-Transformation erleichtern, setzt aber auch umfangreiches mathematisches Spezialwissen voraus, dass zum Teil auf ähnliche Regeln wie bei der Laplace-Transformation aufgebaut ist.
 Siehe Artikel z-Transformation.
Siehe Artikel z-Transformation.
Differenzengleichungen in der Ökonomie
In der ökonomischen Theorie kommen Differenzengleichungen vor allem zum Einsatz, um die Entwicklung ökonomischer Größen über die Zeit zu analysieren. Vor allem in der Wachstumstheorie und Konjunkturtheorie werden zeitliche Abläufe vielmals in Form von Differenzengleichungen abgebildet.
Man geht dabei davon aus, dass z.B. das Bruttoinlandsprodukt sich auf einem bestimmten Pfad hin zu einem langfristigen Gleichgewicht entwickelt, in dem alle Kapazitäten ausgelastet sind. Je nach Lösung der Differenzengleichung ergibt sich der Entwicklungspfad als asymptotischer Verlauf oder als schwingender Verlauf (in etwa Kosinus-Kurven). Es bleibt aber nicht aus, dass zur mathematischen Modellierung (z.B. beim Bruttoinlandsprodukt) einige vereinfachende Annahmen gemacht werden müssen (z.B. über die Lagerbildung, Konsum als Anteil des BIP oder Investitionssteigerung durch Gewinnerwartung).
- Anwendung von Differenzengleichung 1. Ordnung
Ein weiteres klassisches Beispiel ist das Spinnwebtheorem (auch cobweb theorem). Die Entwicklung der Preise und Mengen folgt rekursiven Funktionen oder, mathematisch ausgedrückt, allgemeinen Differenzengleichungen erster Ordnung.
- Anwendung von Differenzengleichung 2. Ordnung
Das Multiplikator-Akzelerator-Modell will erklären, warum das wirtschaftliche Wachstum nicht monoton verläuft, sondern typischerweise einem Konjunkturzyklus folgt. Das Modell lässt sich aus dem Wachstumsmodell von Harrod und Domar heraus entwickeln, eine besondere Variante stammt von Paul A. Samuelson (1939) und John Richard Hicks (1950).
Siehe auch
Literatur
- Jan Lunze: Regelungstechnik 2, Mehrgrößensysteme, Digitale Regelung. 7. Auflage. Springer Verlag, 2013, ISBN 978-3-642-10197-7.
- Krause, Nesemann: Differenzengleichungen und diskrete dynamische Systeme. Eine Einführung in Theorie und Anwendungen. 1999. Auflage. Vieweg+Teubner Verlag, 1999, ISBN 978-3-519-02639-6.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 08.12. 2028