PT1-Glied
Als PT1-Glied bezeichnet man ein LZI-Übertragungsglied in der Regelungstechnik, welches ein proportionales Übertragungsverhalten mit Verzögerung 1. Ordnung aufweist. Ein gebräuchliches Beispiel ist in der Elektrotechnik der Tiefpass (1. Ordnung).
Die zugehörige Funktionalbeziehung im Zeitbereich ist die Differentialgleichung
 ,
,
so dass die komplexe Übertragungsfunktion im Bildbereich die Form

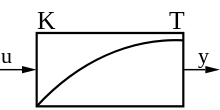
hat. Hierbei bezeichnet K, K > 0, die Übertragungskonstante bzw. den Verstärkungsfaktor und T , T > 0, die Zeitkonstante.
Bodediagramm
Beim PT1-Glied ist  der Frequenzgang. Daher gilt
für den Amplituden-
und Phasengang im Bodediagramm:
der Frequenzgang. Daher gilt
für den Amplituden-
und Phasengang im Bodediagramm:


Amplitudengang
Bezeichnet  die Knick- bzw. Eckkreisfrequenz,
so lässt sich der Amplitudengang grob in zwei Bereiche einteilen:
die Knick- bzw. Eckkreisfrequenz,
so lässt sich der Amplitudengang grob in zwei Bereiche einteilen:

bzw.

Für Kreisfrequenzen unterhalb der Eckkreisfrequenz liegt die Betragskennlinie des PT1-Gliedes parallel zur 0-dB-Linie im Abstand von KdB und für große Kreisfrequenzen fällt sie mit 20 dB/Dekade. Bei der Knickkreisfrequenz ω = ω0 schneiden sich die beiden Asymptoten. Der tatsächliche Wert des Amplitudenganges weicht dort um −3 dB von der asymptotischen Näherung ab. Bei ω = 0,5 ω0 bzw. ω = 2 ω0 beträgt die Abweichung nur noch −1 dB.
Die Eckkreisfrequenz berechnet sich aus der Polstelle
der Übertragungsfunktion, also der Nullstelle
des Nenners 1 + Ts. Die Polstelle ist  und heißt Eigenwert,
dessen Betrag die Eckkreisfrequenz ω0 beschreibt.
und heißt Eigenwert,
dessen Betrag die Eckkreisfrequenz ω0 beschreibt.
Phasengang
Die Phasenverschiebung des PT1-Gliedes beträgt bei kleinen Kreisfrequenzen 0°, bei großen Kreisfrequenzen −90° und bei der Knickkreisfrequenz ω0 −45°.
Für die asymptotische Näherung zeichnet man eine Gerade, die eine Dekade vor der Knickkreisfrequenz bei 0° beginnt und eine Dekade nach der Knickkreisfrequenz bei −90° endet.

Sprungantwort
Die Sprungantwort des PT1-Gliedes wird beschrieben durch

und hat den Verlauf einer e-Funktion. Der Verlauf nähert sich dem Endwert K an. Nach der Zeit t = T beträgt der Wert 0,63 K und nach t = 3 T bereits 0,95 K, es bleibt theoretisch aber immer eine minimale Abweichung vom Endwert erhalten. Die Tangente im Ursprung schneidet den Wert des Verstärkungsfaktors K nach der Zeit T. Der Betrag der Zeitkonstanten T bestimmt die Schnelligkeit des Gliedes.

Ortskurve
Die Ortskurve
( )
des PT1-Gliedes verläuft vom Punkt K auf der positiven reellen Achse
durch den vierten Quadranten für
)
des PT1-Gliedes verläuft vom Punkt K auf der positiven reellen Achse
durch den vierten Quadranten für  in den Punkt 0.
in den Punkt 0.

Komplex konjugiertes Erweitern liefert

sodass sich Real- und Imaginärteil explizit darstellen lässt:


Damit errechnet sich Betrag und Phase


Die Extremwerte ergeben sich folgendermaßen:









Zeitdiskretes PT1-Glied
Das Verhalten eines PT1-Gliedes lässt sich mit der folgenden Formel zeitdiskret berechnen. Sie ist Grundlage zur Nachbildung dieses Reglertypes in der digitalen Signalverarbeitung.
Aus obiger Differentialgleichung folgt mit  als der Schrittweite der Abtastung
die Differenzengleichung:
als der Schrittweite der Abtastung
die Differenzengleichung:

Daraus erhält man

Auflösen nach  ergibt:
ergibt:
![y_{{n}}={\frac {1}{{\frac T{\Delta t}}+1}}\left[Ku_{{n}}+{\frac T{\Delta t}}\cdot y_{{n-1}}\right]](/svg/c3486a16dfafd7e9e86b669b0dc11b5bb4623d8f.svg)
Mit

erhält man eine optimierte Formel mit nur zwei Multiplikationen:

Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 11.09. 2025