Momentenproblem
Momente sind in Naturwissenschaften und Technik Kenngrößen einer Verteilung, welche die Lage und Form dieser Verteilung beschreiben. Sie werden durch Integration über die mit einem potenzierten Abstand gewichteten Verteilung berechnet. Die Aufgabe, aus vorgegebenen Momenten Lage und Form der Verteilung zu ermitteln, heißt Momentenproblem.
Momente verschiedener Art spielen wichtige Rollen in der Stochastik, technischen Mechanik und Bildverarbeitung.
Formen und Ausprägungen
Geschichte und Entwicklung
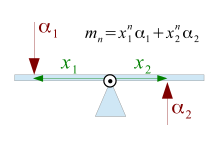
Das Konzept von Momenten hat seinen Ursprung in der Betrachtung von Kräftegleichgewichten bei Waagen. Franciscus Maurolicus (1494–1575) verwendete den Begriff „Momentum“ explizit, um die Stärke der drehenden Kraft zu beschreiben, mit der an einem Hebelarm befestigte Gewichte auf eine Waage wirken. Galileo Galilei zeigte dann 1638, dass die Stärke eines solchen „Moments des Gewichts“ dem Flächeninhalt des aus Abstand und Gewichtskraft gebildeten Rechtecks entspricht. Auf Grundlage von diesem Konzept entwickelte sich der heutige, abstraktere Begriff.
Kontinuierliche und diskrete Verteilungen
Für die Definition eines Momentes bei diskreten Verteilungen lässt sich als
Beispiel eine Verteilung von Massenpunkten auf einer Linie betrachten.
Bezeichnet  den Abstand von einem Bezugspunkt und
den Abstand von einem Bezugspunkt und  die Masse der i-ten Punktmasse, so ist das n-te Moment der
i-ten Punktmasse das Produkt aus Masse und der n-ten Potenz des
Abstandes:
die Masse der i-ten Punktmasse, so ist das n-te Moment der
i-ten Punktmasse das Produkt aus Masse und der n-ten Potenz des
Abstandes:  .
Der Exponent
.
Der Exponent  ist dabei eine natürliche Zahl und wird Ordnung oder Grad des Momentes genannt.
Um das Moment
ist dabei eine natürliche Zahl und wird Ordnung oder Grad des Momentes genannt.
Um das Moment  der gesamten Massenverteilung zu erhalten, werden die Momente aller Punktmassen
addiert:
der gesamten Massenverteilung zu erhalten, werden die Momente aller Punktmassen
addiert:

Das nullte Moment ist die Gesamtmasse. Das erste Moment beschreibt die Lage der Verteilung. Wenn das erste Moment durch die Gesamtmasse geteilt wird, was einer Normierung der Verteilung auf Eins entspricht, erhält man den Abstand des Massenmittelpunktes vom Bezugspunkt. Das Moment zweiter Ordnung ist das Massenträgheitsmoment (siehe unten).
Auf gleiche Art und Weise lässt sich ein Moment für kontinuierlichen
Verteilungen definieren. Hier besteht die Verteilung nicht aus einzelnen
Massepunkten,
sondern einem Körper
mit kontinuierlicher Massenverteilung. Diese Verteilung wird durch ihre
Dichtefunktion (Masse pro Längeneinheit)  charakterisiert. Die Momente der Verteilung erhält man durch Integration:
charakterisiert. Die Momente der Verteilung erhält man durch Integration:

Mithilfe des Lebesgue-Integrals
lassen sich beide Definitionen zusammenfassen, um Momente für allgemeinere,
durch ein Maß
 gegebene Verteilungen zu definieren:
gegebene Verteilungen zu definieren:

Anstelle von Massenverteilungen lassen sich Verteilungen beliebiger anderer
Größen, beispielsweise Wahrscheinlichkeiten betrachten. Ist  eine Zufallsvariable
mit Wahrscheinlichkeitsverteilung
,
so ist das -te
Moment der Erwartungswert
von
eine Zufallsvariable
mit Wahrscheinlichkeitsverteilung
,
so ist das -te
Moment der Erwartungswert
von  .
Das zentrierte zweite Moment (siehe unten) ist die Varianz. Die
Variable
.
Das zentrierte zweite Moment (siehe unten) ist die Varianz. Die
Variable  ,
die sich als Abweichung oder Abstand interpretieren lässt, kann statt aus
,
die sich als Abweichung oder Abstand interpretieren lässt, kann statt aus  auch aus
auch aus  oder
oder  gewählt werden.
gewählt werden.
Momente in mehreren Dimensionen
Bei Momenten in mehreren Dimensionen müssen die Komponenten in Richtung der Basisvektoren einzeln potenziert werden. So ergibt sich in zwei Dimensionen für das Moment p+q-ter Ordnung:

Ein solches Moment ist somit abhängig von der Wahl der Basis sowie den
einzelnen Potenzen p und q. Beispielsweise bei der Berechnung von
Flächenmomenten
( )
werden in kartesischen Koordinaten axiale und gemischte Momente
unterschieden. Bei axialen Momenten sind die Potenzen bis auf eine Richtung Null
(z.B. p = 2, q = 0). Bei gemischten
Momenten, auch Kreuz- oder Verbundmomente genannt, tragen Faktoren
unterschiedlicher Richtungen bei (z.B. p = 1,
q = 1).
Gemischte Momente sind die Deviationsmomente
eines Trägheitstensors
oder die Kovarianz
von Zufallsvariablen.
)
werden in kartesischen Koordinaten axiale und gemischte Momente
unterschieden. Bei axialen Momenten sind die Potenzen bis auf eine Richtung Null
(z.B. p = 2, q = 0). Bei gemischten
Momenten, auch Kreuz- oder Verbundmomente genannt, tragen Faktoren
unterschiedlicher Richtungen bei (z.B. p = 1,
q = 1).
Gemischte Momente sind die Deviationsmomente
eines Trägheitstensors
oder die Kovarianz
von Zufallsvariablen.
Bei den polaren Momenten werden nicht Achsabstände, sondern der
Abstand  zum Ursprung, also die Radialkomponente in Polarkoordinaten
potenziert.
zum Ursprung, also die Radialkomponente in Polarkoordinaten
potenziert.
Wechsel des Bezugspunktes und zentrierte Momente
Momente vom Grad größer als Null sind im Allgemeinen von der Lage des Bezugspunktes abhängig. Zwei Momente lassen sich nur sinnvoll addieren, wenn sie sich auf den gleichen Punkt beziehen.
Aus dem Moment  ersten Grades, das sich auf den Ursprung des Koordinatensystems bezieht kann wie
folgt ein Moment
ersten Grades, das sich auf den Ursprung des Koordinatensystems bezieht kann wie
folgt ein Moment  ,
bezogen auf
,
bezogen auf  ,
berechnet werden, wobei
,
berechnet werden, wobei  das nullte Moment ist:
das nullte Moment ist:

Der zusätzliche Term  wird auch als Versatzmoment
bezeichnet. Allgemein lässt sich mit dem binomischen
Lehrsatz für die Umrechnung von einem Moment
wird auch als Versatzmoment
bezeichnet. Allgemein lässt sich mit dem binomischen
Lehrsatz für die Umrechnung von einem Moment  vom Grad n in ein Moment
vom Grad n in ein Moment  bezogen auf den um
verschobenen Ursprung zeigen, dass
bezogen auf den um
verschobenen Ursprung zeigen, dass

Für ein Moment zweiten Grades ist diese Relation als Steinerscher Satz und
in der Stochastik als Verschiebungssatz
bekannt. Wenn alle Momente  vom Grad
vom Grad  Null sind, so ist das Moment
unabhängig von der Wahl des Bezugspunktes. So ist beispielsweise ein Drehmoment von einem Kräftepaar unabhängig
von der Wahl des Bezugspunktes, da die Summe aller Kräfte Null ist.
Null sind, so ist das Moment
unabhängig von der Wahl des Bezugspunktes. So ist beispielsweise ein Drehmoment von einem Kräftepaar unabhängig
von der Wahl des Bezugspunktes, da die Summe aller Kräfte Null ist.
Um Vergleichbarkeit herzustellen, wird der Bezugspunkt häufig so gewählt, dass das erste Moment Null ist. Ein solches Moment wird zentral oder zentriert genannt. Es bezieht sich dann auf den Mittelpunkt der Verteilung, beispielsweise den Erwartungswert oder Schwerpunkt. Das n-te zentrierte Moment berechnet sich durch

wobei
das nullte Moment und
das erste (nicht zentrierte) Moment bedeutet.
Momente von Vektorfeldern
In der Physik gibt es häufig vektorwertige Größen.
Sie haben neben ihrem Betrag auch eine Richtung. Einer Verteilung einer
vektorwertigen Größe im Raum, also einem Vektorfeld
 ,
lassen sich ebenfalls Momente zuordnen. Eine solche Größe ist beispielsweise das
Drehmoment (
,
lassen sich ebenfalls Momente zuordnen. Eine solche Größe ist beispielsweise das
Drehmoment ( ist hierbei die Kraft-Verteilung), das magnetische Moment
(
ist hierbei die Stromdichte-Verteilung)
oder der Drehimpuls (früher auch
Impulsmoment genannt,
ist hierbei die Impuls-Verteilung).
ist hierbei die Kraft-Verteilung), das magnetische Moment
(
ist hierbei die Stromdichte-Verteilung)
oder der Drehimpuls (früher auch
Impulsmoment genannt,
ist hierbei die Impuls-Verteilung).
Für ein Vektorfeld
ist das Moment erster Ordnung ein Vektor, der durch das Integral über das Kreuzprodukt  gegeben ist:
gegeben ist:

Wenn die Komponente eines Moments bezüglich einer bestimmten Richtung zu
berechnen ist, sind immer nur die Anteile der Vektoren des Vektorfelds zu
verwenden, die orthogonal zu dieser Richtung sind. Wählt man ein kartesisches
Koordinatensystem, so ist beispielsweise die z-Komponente des Moments
durch die „Dichten“  und
und  zu berechnen.
zu berechnen.
Trigonometrische Momente
Hat
lediglich eine Winkelabhängigkeit, so lässt sich ein trigonometrisches Moment
definieren.
Dazu wählt man  aus den komplexen Zahlen und erhält
aus den komplexen Zahlen und erhält

Momentenproblem
Das Momentenproblem ist ein klassisches Problem der Analysis. Statt aus einer
Verteilung die Momente zu berechnen, sollen aus einer gegebenen Folge von Momenten
 Rückschlüsse auf eine mögliche Verteilung
gezogen werden. Die Bezeichnung Momentenproblem wurde von
Thomas Jean Stieltjes eingeführt, der das Problem 1894 erstmals ausführlich untersuchte
und dabei die Bezeichnungen und Konzepte aus der Mechanik übernahm.
Rückschlüsse auf eine mögliche Verteilung
gezogen werden. Die Bezeichnung Momentenproblem wurde von
Thomas Jean Stieltjes eingeführt, der das Problem 1894 erstmals ausführlich untersuchte
und dabei die Bezeichnungen und Konzepte aus der Mechanik übernahm.
Je nach Träger der Verteilung (das ist das Komplement der größten offenen Menge vom Maß null), werden unterschiedliche Varianten des Momentenproblems unterschieden: Beim Hamburger Momentenproblem ist der Träger die gesamte reelle Achse (-∞,∞), beim Stieltjes Momentenproblem die Halbachse [0,∞) und beim Hausdorf Momentenproblem ein beschränktes Intervall o.B.d.A. [0,1]. Eine weitere Variante ist das trigonometrische Momentenproblem, bei dem die Verteilung auf einem Einheitskreis in Abhängigkeit vom Winkel, also ein trigonometrisches Moment gesucht wird.
Ist die Folge von Momenten beschränkt, wird das Problem (engl.) truncated genannt, ist sie unbeschränkt so heißt das Problem (engl.) infinite.
Beispiele aus der Mechanik
Das Kraft- oder Drehmoment
Das Drehmoment ist das Produkt aus Kraft und Hebelarm. Es ist das in der Technik am häufigsten vorkommende Moment. Das Wort Moment wird daher Vielfach als Abkürzung oder als Synonym für Drehmoment gebraucht. Für spezielle Drehmomente werden zusammengesetzte Begriffe mit Namensteil -moment, aber ohne Dreh- gebraucht. Beispiele sind:
- Antriebsmoment,
- Lastmoment,
- Biegemoment und
- Torsionsmoment.
Wirken mehrere Kräfte, so lassen sich zu einem Drehmoment oder einer resultierenden Kraft mit resultierendem Hebelarm zusammenfassen. Auch linear (Linienkraft) oder flächig (Flächendruck) verteilte Kräfte lassen sich so zusammenfassen.
Flächenmoment
Ebenfalls häufig verwendete Momente sind die Flächenmomente.
Um ein Flächenmoment der Fläche  zu bestimmen, wählt man für
zu bestimmen, wählt man für  die charakteristische
Funktion der Fläche
die charakteristische
Funktion der Fläche

Das nullte Flächenmoment ist der Flächeninhalt. Teilt man die Momente durch den Flächeninhalt, erhält man als erstes Flächenmoment den Schwerpunkt der Fläche. Das zentrierte Flächenmoment zweiten Grades ist das Flächenträgheitsmoment, das als Kenngröße für Querschnitte von Balken bei deren Festigkeits- und Verformungsberechnung dient.
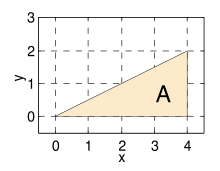
Als Beispiel wird ein Dreieck in der xy-Koordinatenebene betrachtet, das durch die Geraden x=4,y=0 und y=x/2 begrenzt ist. Der Flächeninhalt ist

Die x-Koordinate des Schwerpunkts ist

Das axiale Flächenträgheitsmoment um die y-Achse berechnet sich aus dem Quadrat des x-Abstandes zum Schwerpunkt:

Massenträgheitsmoment
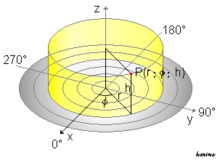
Das (Massen-) Trägheitsmoment
 eines Körpers ist auf eine bestimmte Rotationsachse bezogen. Es gibt an, wie
stark sich der Körper einer Drehbeschleunigung widersetzt. Das Trägheitsmoment
ist ein Moment zweiten Gerades in Zylinderkoordinaten,
bei dem der Abstand zur Rotationsachse
quadriert wird. Es berechnet sich durch Integration über eine Massenverteilung
eines Körpers ist auf eine bestimmte Rotationsachse bezogen. Es gibt an, wie
stark sich der Körper einer Drehbeschleunigung widersetzt. Das Trägheitsmoment
ist ein Moment zweiten Gerades in Zylinderkoordinaten,
bei dem der Abstand zur Rotationsachse
quadriert wird. Es berechnet sich durch Integration über eine Massenverteilung
 ,
wobei
die Massendichte
(Masse pro Volumen) des Volumenelementes
,
wobei
die Massendichte
(Masse pro Volumen) des Volumenelementes  ist.
ist.
Als Beispiel wird ein homogener
Zylinder mit konstanter Dichte  ,
Durchmesser
,
Durchmesser  ,
Höhe
,
Höhe  und der Masse
und der Masse  betrachtet. Das Trägheitsmoment dieses Zylinders für eine Rotation um die
z-Achse ist dann gegeben durch das Integral:
betrachtet. Das Trägheitsmoment dieses Zylinders für eine Rotation um die
z-Achse ist dann gegeben durch das Integral:



© biancahoegel.de
Datum der letzten Änderung: Jena, den: 04.12. 2019