Drehimpuls
| Physikalische Größe | |||||||
|---|---|---|---|---|---|---|---|
| Name | Drehimpuls | ||||||
| Größenart | Wirkung | ||||||
| Formelzeichen | 
| ||||||
| |||||||
Der Drehimpuls (in der Mechanik auch Drall oder veraltet Schwung oder Impulsmoment, in der Quantenmechanik in manchen Fällen auch Spin) ist eine physikalische Erhaltungsgröße. Ein System hat beispielsweise dann einen Drehimpuls, wenn es sich um seinen Massenschwerpunkt dreht, wie bspw. ein Kreisel, ein Sportler bei einer Pirouette oder ein Planetensystem.
Der Drehimpuls ist eine vektorielle
Größe, und zwar ein Pseudovektor.
Seine Dimension ist das Produkt aus Masse, Länge und Geschwindigkeit. Diese ist
gleich dem Produkt aus Energie und Zeit und damit auch die Dimension der Größe
Wirkung.
Im SI-Einheitensystem
wird er in Joulesekunden
( )
gemessen. Sein Formelzeichen ist
)
gemessen. Sein Formelzeichen ist  oder
oder  .
.
Der Drehimpuls eines Systems ist die Summe der Drehimpulse seiner Komponenten. Der Drehimpuls einer Komponente des Systems setzt sich im Allgemeinen aus zwei Komponenten zusammen (s. Der Drehimpuls eines starren Körpers):
- dem Bahndrehimpuls, als dem Anteil, der aufgrund einer Bewegung eines massebehafteten Körpers bezüglich eines Bezugspunkts entsteht, sofern der Körper sich nicht direkt auf den Bezugspunkt zu oder von ihm weg bewegt.
- dem Eigendrehimpuls, als dem Anteil, der nicht Bahndrehimpuls ist. In der Mechanik wird dieser Anteil von der Rotation um den Massenschwerpunkt des Körpers hervorgerufen. In der Quantenmechanik ist es der Spin.
Der Drehimpuls bezieht sich immer auf den Punkt im Raum, der als Bezugspunkt der Drehbewegung gewählt wird. Bei einem frei rotierenden System wird als Bezugspunkt oft der Schwerpunkt festgelegt, in der Astronomie meist der Schwerpunkt des Zentralgestirns. Wenn die Rotation durch ein Lager vorgegeben ist, wird meist ein Punkt auf der Achse gewählt.
Der Drehimpuls lässt sich allgemein als Vektorprodukt aus dem Ortsvektor  und dem Impuls
und dem Impuls
 des Körpers berechnen:
des Körpers berechnen:

oder mit Hilfe des Trägheitstensors
 und der Winkelgeschwindigkeit
und der Winkelgeschwindigkeit
 zu:
zu:

In der Quantenmechanik wird der Drehimpuls durch den Drehimpulsoperator
beschrieben. Dabei zeigt sich, dass er eine quantisierte
Größe ist. Der Betrag des Drehimpulses ist stets ein ganz- oder halbzahliges
Vielfaches des reduzierten
Planckschen Wirkungsquantums. Die Ausrichtung des Drehimpulses ist ebenfalls
gequantelt. Sie unterliegt der Richtungsquantelung
in Bezug auf die Quantisierungsachse.
Die Rolle des Eigendrehimpulses wird vom Spin
wahrgenommen, der nicht mit einer räumlichen Bewegung verbunden ist. Somit setzt
sich der Drehimpulsoperator aus den Komponenten Bahndrehimpulsoperator
 und Spinoperator
zusammen.
und Spinoperator
zusammen.
Leonhard Euler führte 1775 den Drallsatz als ein fundamentales von den Newton’schen Gesetzen unabhängiges Prinzip in der Mechanik ein. Er besagt, dass ein Drehmoment auf das System einwirken muss, um den Drehimpuls zu ändern. Die Drehimpulserhaltung lässt sich im Alltag an vielen Stellen erfahren.
Definition und Veranschaulichung
Für einen Massenpunkt,
der sich am Ort
mit dem Impuls
 bewegt, wird der Drehimpuls durch das Kreuzprodukt
bewegt, wird der Drehimpuls durch das Kreuzprodukt

definiert. Bezugspunkt ist dabei der Ursprung  .
Für den Drehimpuls um einen anderen Bezugspunkt
.
Für den Drehimpuls um einen anderen Bezugspunkt  muss man
durch
muss man
durch  ersetzen.
ersetzen.
Zur Veranschaulichung geeignet ist der Fall, dass der Massenpunkt eine ebene Kreisbewegung um den Ursprung ausführt. Dann liegt der Drehimpulsvektor senkrecht zur Kreisebene, also in Richtung der Achse der Kreisbewegung, und hat den Betrag
 .
.
Der Drehimpuls wächst mit
- höherer Winkelgeschwindigkeit
proportional,
- größerer Masse
 ebenfalls proportional,
ebenfalls proportional, - größerem Abstand
 dieser Masse zur Drehachse jedoch in quadratischem Verhältnis.
dieser Masse zur Drehachse jedoch in quadratischem Verhältnis.
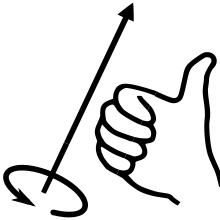
Der Drehimpulsvektor zeigt in die Richtung, in der sich bei gleichem Drehsinn eine Rechtsschraube voranbewegen würde. Es gilt die Korkenzieherregel oder Rechte-Faust-Regel: Wenn die gekrümmten Finger der rechten Hand die Richtung der Drehbewegung angeben, so zeigt der Daumen in Richtung des Drehimpulses (siehe Bild). Dass die rechte Hand für diese Regel verwendet werden muss und nicht die linke, liegt an der Definition des Kreuzprodukts zweier Vektoren.
Den Drehimpuls eines ausgedehnten Körpers zu einem bestimmten Bezugspunkt erhält man, in dem man die Drehimpulse seiner Massenpunkte zu diesem Bezugspunkt bildet und vektoriell addiert.
Auch wenn die Bezeichnung anderes vermuten lässt, haben auch solche Körper einen Drehimpuls, die anschaulich gesehen gar keine Drehung ausführen. Selbst ein geradlinig bewegter, nicht um sich selbst rotierender Körper besitzt einen Drehimpuls, wenn man den Bezugspunkt so wählt, dass er nicht auf der Bahn des Massenmittelpunkts des Körpers liegt. Der Drehimpuls berechnet sich dann einfach aus dem Produkt von Masse, Geschwindigkeit und senkrechtem Abstand des Bezugspunktes von der Bahn. Es lassen sich daher auch stets Bezugssysteme finden, in denen zur Bewegung des Massenmittelpunktes kein Drehimpuls gehört. Der Drehimpuls eines um seinen Massenmittelpunkt rotierenden Körpers hingegen verschwindet nur in einem mitrotierenden, also beschleunigten Bezugssystem.
Drehimpulserhaltung
Erfahrungsgemäß bleibt der Drehimpuls eines isolierten physikalischen Systems nach Betrag und Richtung unverändert, gleichgültig, welche inneren Kräfte und Wechselwirkungen zwischen den Bestandteilen des Systems wirken. Dies wird als Drehimpulserhaltung bezeichnet. Nahezu perfekt isolierte Systeme sind z.B. die Atomkerne, die Moleküle in verdünnten Gasen und astronomische Objekte im Weltall. Das zweite Keplersche Gesetz, nach dem ein Planet sich auf seiner exzentrischen Umlaufbahn umso schneller bewegt, je näher er der Sonne ist, lässt sich aus der Drehimpulserhaltung herleiten.
Die Drehimpulserhaltung gilt auch in Anwesenheit äußerer Kräfte, wenn diese Kräfte insgesamt kein Drehmoment auf das System ausüben. In einem homogenen Schwerefeld gilt das z.B. für den Drehimpuls jedes Körpers um seinen eigenen Schwerpunkt. Sind die äußeren Kräfte auf verschiedene Teile eines Systems parallel zueinander, so bleibt jedenfalls die zu den Kräften parallele Komponente des Drehimpulses erhalten.
Die Drehimpulserhaltung zeigt sich beispielsweise bei Spielzeugkreiseln, beim Diskuswurf und beim Pirouetteneffekt.
Die Drehimpulserhaltung gilt für beliebige physikalische Systeme (z.B. auch elektromagnetische Felder) und kann mithilfe des Noether-Theorems daraus hergeleitet werden, dass die physikalischen Gesetze nicht von der Orientierung des betrachteten Systems im Raum abhängen.
Verschiebung, Drehung, Spiegelung
 und Impuls
bei einer Punktspiegelung um den Koordinatenursprung ihre Richtung umkehren,
bleibt die des Drehimpulses bezüglich der Scheibenmitte
und Impuls
bei einer Punktspiegelung um den Koordinatenursprung ihre Richtung umkehren,
bleibt die des Drehimpulses bezüglich der Scheibenmitte  unverändert. (Im Bild sind die Vektoren in Fettdruck und nicht mit Pfeil
gezeichnet.)
unverändert. (Im Bild sind die Vektoren in Fettdruck und nicht mit Pfeil
gezeichnet.)Betrag und Richtung des Drehimpulses einer Punktmasse hängen davon ab,
welchen Punkt man als Bezugspunkt wählt. Bei Verschiebung des Bezugspunkts
ändert sich der Vektor jedes Ortes in  und der Drehimpuls in
und der Drehimpuls in

Oft wählt man als Bezugspunkt den Massenmittelpunkt oder einen Punkt, der bei den betrachteten Drehungen ruht, also auf der Drehachse liegt.
Das Kreuzprodukt zweier Vektoren steht stets senkrecht auf der von ihnen aufgespannten Ebene, eine Drehung des betrachteten Systems aber dreht sowohl die Ortsvektoren als auch die Bahngeschwindigkeiten um denselben Betrag, wodurch auch der Drehimpuls in gleicher Weise mitgedreht wird.
Bei einer Punktspiegelung am Bezugspunkt geht der Ort in den gegenüber liegenden Ort über. Auch das Vorzeichen der Geschwindigkeit in Bezug auf diesen Punkt kehrt sich um. Bei der Bildung des Kreuzprodukts kompensieren sich diese beiden Vorzeichenwechsel, sodass sich bei einer Punktspiegelung der Drehimpuls nicht ändert. Damit unterscheidet er sich vom Verhalten der Geschwindigkeit oder des Ortsvektors: Der Drehimpuls gehört zur Klasse der Pseudovektoren.
Eulerscher Drehimpulssatz
Um den Impuls eines Körpers zu ändern, muss eine Kraft wirken. Genauer gesagt ist die zeitliche Änderung des Impulses die Kraft:

Ganz analog formulierte 1754 Leonhard
Euler den Eulerschen Drehimpulssatz, nach dem die zeitliche Änderung des
Drehimpulses bezüglich des Ursprungs gleich dem angreifenden Drehmoment  um den Ursprung ist:
um den Ursprung ist:

Um den Drehimpuls eines Körpers zu ändern, muss ein Drehmoment auftreten. Ein
Drehmoment ist das Kreuzprodukt
von Abstandsvektor
und Kraft  :
:

Der Drehimpulssatz ergibt sich, wenn man den Drehimpuls nach der Zeit
ableitet, beispielsweise bei einer Punktmasse am Ort  :
:
![{\displaystyle {\frac {\mathrm {d} {\vec {L}}}{\mathrm {d} t}}={\dot {\vec {L}}}={\frac {\mathrm {d} }{\mathrm {d} t}}[{\vec {x}}\times {\vec {p}}]={\underline {{\dot {\vec {x}}}\times {\vec {p}}}}+{\vec {x}}\times {\dot {\vec {p}}}={\vec {x}}\times {\vec {F}}={\vec {M}}.}](/svg/b1310461f353242509e947dbfb6e42f34cf4cae0.svg)
Da die Geschwindigkeit und der Impuls parallel sind, entfällt ihr
Kreuzprodukt im unterstrichenen Term. Um den (Bahn-)Drehimpuls einer Punktmasse zu verändern,
bedarf es also eines Moments ,
das dem Moment der an der Punktmasse angreifenden Kraft
entspricht. Bei einem ausgedehnten Körper vermag auch ein Kräftepaar mit
resultierender Kraft  eine Änderung des Drehimpulses auszulösen, was den Eigendrehimpuls betrifft,
siehe unten. Der Eigendrehimpuls entfällt freilich bei einer Punktmasse.
eine Änderung des Drehimpulses auszulösen, was den Eigendrehimpuls betrifft,
siehe unten. Der Eigendrehimpuls entfällt freilich bei einer Punktmasse.
Handelt es sich bei der Kraft um eine Zentralkraft
 ,
so bleibt der Drehimpuls um das Zentrum erhalten, denn die zeitliche Änderung
des Drehimpulses – das angreifende Moment der Zentralkraft –
verschwindet:
,
so bleibt der Drehimpuls um das Zentrum erhalten, denn die zeitliche Änderung
des Drehimpulses – das angreifende Moment der Zentralkraft –
verschwindet:

Folglich ist der Drehimpuls um das Zentrum über die Zeit konstant. Dies betrifft insbesondere Planetenbewegungen um ein Zentralgestirn.
Ebene Bahn, Flächensatz
Behält der Drehimpuls einer Punktmasse (beispielsweise die Erde, die die Sonne umläuft) jederzeit den anfänglichen Wert, dann verläuft die Bahn der Punktmasse in einer Ebene.
Denn das Kreuzprodukt steht senkrecht auf seinen Faktoren und zu allen Zeiten
 gilt für den Drehimpuls bezüglich des Koordinatenursprungs
gilt für den Drehimpuls bezüglich des Koordinatenursprungs

wenn
die Masse und  die Bahngeschwindigkeit der Punktmasse sind. Wenn nun der Drehimpuls
zeitunabhängig ist,
die Bahngeschwindigkeit der Punktmasse sind. Wenn nun der Drehimpuls
zeitunabhängig ist,  dann erfüllt jeder Bahnpunkt die Ebenengleichung
dann erfüllt jeder Bahnpunkt die Ebenengleichung

Es handelt sich also um eine Bewegung in der Ebene durch den Massenmittelpunkt des Systems senkrecht zum Drehimpuls.
Dann gilt das zweite Keplersche Gesetz (auch Flächensatz genannt): Der Fahrstrahl zum Planeten überstreicht in gleichen Zeiten gleich große Flächen.
Denn in einer kurzen Zeit  ändert sich der Fahrstrahl
um
ändert sich der Fahrstrahl
um  und überstreicht dabei die Fläche des Dreiecks mit diesen beiden Seiten. Das
Dreieck ist halb so groß wie das von beiden Vektoren aufgespannte
Parallelogramm, dessen Inhalt durch den Betrag des Kreuzprodukts gegeben ist. In
der Zeit
überstreicht der Fahrstrahl folglich die Fläche
und überstreicht dabei die Fläche des Dreiecks mit diesen beiden Seiten. Das
Dreieck ist halb so groß wie das von beiden Vektoren aufgespannte
Parallelogramm, dessen Inhalt durch den Betrag des Kreuzprodukts gegeben ist. In
der Zeit
überstreicht der Fahrstrahl folglich die Fläche

Wenn der Drehimpuls sich nicht mit der Zeit ändert, ist folglich die Flächengeschwindigkeit konstant. Dieser Sachverhalt lässt sich auch auf Situationen verallgemeinern, in denen sich der Drehimpuls ändert, siehe Drallsatz#Flächensatz.
Der Flächensatz gilt auch in relativistischer Physik, wenn zudem die Energie
 erhalten ist. Denn in relativistischer Physik ist
erhalten ist. Denn in relativistischer Physik ist

und

Für ebene Bahnen gibt es einen Zusammenhang zwischen Drehimpuls
und Winkelgeschwindigkeit
 ,
der für den Runge-Lenz-Vektor
relevant ist:
,
der für den Runge-Lenz-Vektor
relevant ist:

Zum Beweis zerlegt man die Geschwindigkeit in eine radiale und eine azimutale
Komponente (siehe Polarkoordinaten/Geschwindigkeit),
 .
Im Kreuzprodukt mit
.
Im Kreuzprodukt mit  fällt die Radialgeschwindigkeit weg, und man erhält
fällt die Radialgeschwindigkeit weg, und man erhält

Der Drehimpuls eines starren Körpers
Der Drehimpuls eines Körpers ist die Summe der Drehimpulse seiner Komponenten:

bzw. für einen Körper mit kontinuierlicher Masseverteilung das Integral:

 … die Massen der Massepunkte des Körpers mit diskreter Masserverteilung
… die Massen der Massepunkte des Körpers mit diskreter Masserverteilung … die Massendichte der kontinuierlichen Masseverteilung
… die Massendichte der kontinuierlichen Masseverteilung und
und  … die Orte und Geschwindigkeiten der Massepunkte des Körpers mit diskreter
Masseverteilung
… die Orte und Geschwindigkeiten der Massepunkte des Körpers mit diskreter
Masseverteilung … das Geschwindigkeitsfeld, das angibt, mit welcher Geschwindigkeit sich die
Masse am Ort
bewegt
… das Geschwindigkeitsfeld, das angibt, mit welcher Geschwindigkeit sich die
Masse am Ort
bewegt
Mit Hilfe des Massenmittelpunkts
eines Körpers und dessen Ortskoordinate  sowie seiner Schwerpunktsgeschwindigkeit
sowie seiner Schwerpunktsgeschwindigkeit
 können darauf bezogene Ortskoordinaten
können darauf bezogene Ortskoordinaten  und die Winkelgeschwindigkeiten
der Massepunkte
und die Winkelgeschwindigkeiten
der Massepunkte  definiert werden. Dann lassen sich die Geschwindigkeiten ausdrücken als:
definiert werden. Dann lassen sich die Geschwindigkeiten ausdrücken als:

Bei einem starren Körper, dessen Ausrichtung zum Bezugspunkt konstant ist,
sind zudem alle Winkelgeschwindigkeiten gleich groß  .
Damit ergibt sich der Drehimpuls zu:
.
Damit ergibt sich der Drehimpuls zu:

Hier sind zusätzlich
 die Gesamtmasse des Körpers und
die Gesamtmasse des Körpers und![{\displaystyle \mathbf {\Theta } _{s}=\int \mathrm {d} ^{3}x\rho ({\vec {x}})\,[({\vec {x}}\cdot {\vec {x}})\,\mathbf {1} -{\vec {x}}\otimes {\vec {x}}]}](/svg/50397d96effef8bb021233f799c517cd20bac51f.svg) der Trägheitstensor
des Körpers bezogen auf seinen Massenmittelpunkt.
der Trägheitstensor
des Körpers bezogen auf seinen Massenmittelpunkt.
Herleitung
Bei der Herleitung kommen verschiedene Umstellungen, die Graßmann-Identität (BAC-CAB-Formel), und die Definition des Massenmittelpunkts zum Einsatz:

Der erste Term  wird Bahndrehimpuls genannt, der zweite Term ist der
Eigendrehimpuls.
wird Bahndrehimpuls genannt, der zweite Term ist der
Eigendrehimpuls.
Der Eigendrehimpuls
Der Eigendrehimpuls eines starren Körpers ist der Anteil seines
Drehimpulses, der durch die Rotation um seinen Massenmittelpunkt
darstellbar ist. Mit Hilfe der Winkelgeschwindigkeit
 und des Trägheitstensors
und des Trägheitstensors  ,
jeweils auf den Massenmittelpunkt
bezogen, lässt er sich als deren Matrixprodukt berechnen:
,
jeweils auf den Massenmittelpunkt
bezogen, lässt er sich als deren Matrixprodukt berechnen:

Im Allgemeinen zeigen
und  nicht in die gleiche Richtung – ein rotierender Körper „eiert“, wenn er
sich frei bewegen kann, oder zeigt Unwucht,
wenn die Richtung der Achse festgehalten wird. Nur bei Rotation um eine der Hauptträgheitsachsen
des Körpers sind
und
parallel, sodass die Erhaltung des Drehimpulses auch gleichbleibende Richtung
der Drehachse und damit die Konstanz des Trägheitsmoments bewirkt. Der
Trägheitstensor ist symmetrisch
und deshalb sind die Hauptträgheitsachsen paarweise orthogonal. Aus dem
Trägheitstensor kann man zu jeder beliebigen Drehachse das Trägheitsmoment
und die Hauptträgheitsachsen durch Lösung des Eigenwertproblems
berechnen.
nicht in die gleiche Richtung – ein rotierender Körper „eiert“, wenn er
sich frei bewegen kann, oder zeigt Unwucht,
wenn die Richtung der Achse festgehalten wird. Nur bei Rotation um eine der Hauptträgheitsachsen
des Körpers sind
und
parallel, sodass die Erhaltung des Drehimpulses auch gleichbleibende Richtung
der Drehachse und damit die Konstanz des Trägheitsmoments bewirkt. Der
Trägheitstensor ist symmetrisch
und deshalb sind die Hauptträgheitsachsen paarweise orthogonal. Aus dem
Trägheitstensor kann man zu jeder beliebigen Drehachse das Trägheitsmoment
und die Hauptträgheitsachsen durch Lösung des Eigenwertproblems
berechnen.
Drehimpuls in der Relativitätstheorie
In der Relativitätstheorie
kann der Drehimpuls nicht in einen Vierervektor eingebettet werden. Dies wird
bereits dadurch offensichtlich, dass  unter Lorentztransformationen
wie
unter Lorentztransformationen
wie  transformiert. Dieses Problem wird dadurch umgangen, dass der
Drehimpulstensor
transformiert. Dieses Problem wird dadurch umgangen, dass der
Drehimpulstensor  eingeführt wird. Dieser ist definiert als
eingeführt wird. Dieser ist definiert als

und seine Einträge sind

mit 
Siehe auch
- Spezifischer Drehimpuls
- Galilei-Transformation als Grundlage der klassischen Mechanik
Literatur
- Dieter Meschede: Gerthsen Physik. 24., überarbeitete Auflage. Springer, Heidelberg Dordrecht London New York 2010, ISBN 978-3-642-12893-6.
- Florian Scheck: Theoretische Physik 1. 8. Auflage. Springer, Berlin Heidelberg New York 2007, ISBN 978-3-540-71377-7.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 09.07. 2024