Cauchy-Elastizität
Cauchy-Elastizität (von Augustin-Louis Cauchy und griechisch ελαστικός elastikos „anpassungsfähig“) ist ein Materialmodell der Elastizität. Elastizität ist die Eigenschaft eines Körpers, unter Krafteinwirkung seine Form zu verändern und bei Wegfall der einwirkenden Kraft in die Ursprungsform zurückzukehren (Beispiel: Sprungfeder). Als Ursache der Elastizität kommen Verzerrungen des Atomgitters (bei Metallen), das Dehnen von Molekülketten (Gummi und Kunststoffe) oder die Änderung des mittleren Atomabstandes (Flüssigkeiten und Gase) in Frage.
In der Cauchy-Elastizität sind die Reaktionskräfte bei der Verformung eines Körpers ausschließlich von der aktuellen Verformung bestimmt. Solche Zusammenhänge beschreiben beispielsweise die Zustandsgleichungen der Gase. Ist der Ausgangszustand kräftefrei, so wird dieser nach jedweder Verformung wieder eingenommen, wenn die Belastungen entfernt werden. Verschiedene Verformungspfade, die am Ende dieselben Verformungen zur Folge haben, resultieren am Ende in denselben Reaktionskräften. Auch die Deformationsgeschwindigkeiten haben auf Materialgleichungsebene keinen Einfluss auf die Reaktionen. Cauchy-Elastizität ist eine zeitunabhängige Materialeigenschaft.
Dissipative Vorgänge wie viskoses oder plastisches Fließen sind damit ausgeschlossen, was bei realen Materialien innerhalb ihrer Elastizitätsgrenze gewährleistet ist. Reale Flüssigkeiten, Gase und manche Feststoffe (wie Eisen und Glas) sind bei schnellen, geringfügigen Volumenänderungen (z.B. bei Schallwellen) in guter Näherung elastisch. Die Elastizitätsgrenze kann bei Feststoffen bei langsamen und hinreichend kleinen Verformungen eingehalten werden, die in vielen Anwendungen, insbesondere im technischen Bereich, vorliegen.
Obwohl die Reaktionskräfte in einem Cauchy-elastischen Material vom zurückgelegten Verformungsweg unbeeinflusst sind, kann bei Feststoffen die auf verschiedenen Verformungswegen (mit gleichem Start- und Endpunkt) geleistete Formänderungsarbeit unterschiedlich groß ausfallen, was in Abwesenheit eines Dissipationsmechanismus im Widerspruch zu thermodynamischen Prinzipien steht. Wegunabhängigkeit der Formänderungsarbeit führt zu Hyperelastizität, die ein Spezialfall der Cauchy-Elastizität ist. Weitere Bedingungen an die Modellierung der Cauchy-Elastizität können aus dem Prinzip der materiellen Objektivität, demzufolge das Materialverhalten bezugssysteminvariant ist, und im Fall der Isotropie abgeleitet werden.
Viele elastische Materialien wie Stahl, Gummi, Plastik, Holz und Beton aber auch biologische Gewebe können in guter Näherung mit Cauchy-Elastizität beschrieben werden.
Definition
In einem Cauchy-elastischen Material ist der Cauchy’sche
Spannungstensor  eine Funktion nur des vorliegenden Deformationsgradienten
eine Funktion nur des vorliegenden Deformationsgradienten
 :
:

Diese Funktion wird im Allgemeinen vom Ausgangszustand des Körpers,
insbesondere anfänglich vorhandenen Eigenspannungen, abhängen. Zumeist wird aber
der undeformierte Grundzustand, in dem der Deformationsgradient gleich dem Einheitstensor  ist, spannungsfrei sein:
ist, spannungsfrei sein:

Makroskopisches Verhalten
Makroskopisch lassen sich folgende Eigenschaften an einem Cauchy-elastischen Körper beobachten:
- Bei gegebener Verformung (Fluide: Volumenänderung) haben die Reaktionskräfte (der Druck) unabhängig von der Vorgeschichte immer denselben Wert.
- Ist der Ausgangszustand unbelastet, so wird dieser nach jedweder Verformung wieder eingenommen, wenn die Belastungen entfernt werden. Bei elastischen Flüssigkeiten und Gasen ist der Zustand durch das eingenommene Volumen bestimmt, das unter gleichen Bedingungen immer gleich ist.
- Das Materialverhalten ist geschwindigkeitsunabhängig. Die Geschwindigkeit, mit der eine Verformung (Fluide: Volumenänderung) stattfindet, hat keinen Einfluss auf den Widerstand (Druck), den der Körper der Verformung entgegensetzt.
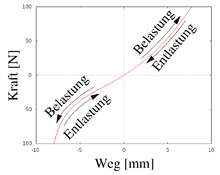
- Im einachsigen Zugversuch erfolgen Be- und Entlastung stets entlang des gleichen Weges so wie im nebenstehenden Bild. Bei Flüssigkeiten und Gasen entspricht das einem Kompressions- und Expansionsversuch.
Bei hinreichend kleinen Verformungen ist die Kraft-Weg-Beziehung bei Feststoffen linear und kann die Elastizität mit Moduln beschrieben werden. Weil die aufzuwendende Kraft und der zurückgelegte Weg bei einer Deformation maßgeblich von den Dimensionen des Körpers abhängen, wird die Kraft auf ihre Wirkfläche und der Weg auf eine geeignete Abmessung des Körpers bezogen. Die bezogene Kraft ist die Spannung und der bezogene Weg die Dehnung. Die Moduln quantifizieren das Verhältnis zwischen den Spannungen und den Dehnungen und sind eine Materialeigenschaft. Der Elastizitätsmodul gilt bei einachsigem Zug, der Schubmodul bei Scherung und der Kompressionsmodul bei allseitigem Druck. Bei einachsigem Zug tritt nicht nur in Zugrichtung eine Verformung auf, sondern auch quer dazu, was die dimensionslose Querdehnzahl erfasst. Die vollständige Beschreibung der isotropen linearen Cauchy-Elastizität benötigt nur zwei dieser Größen. Bei anisotropem linearem Verhalten werden maximal 36 Parameter benötigt (Erst die Annahme der Hyperelastizität erlaubt die Reduktion auf 21 Parameter.)
Materielle Objektivität
Das Prinzip von der materiellen Objektivität besagt, dass das
Materialverhalten bezugssysteminvariant ist oder, genauer, Invariant gegenüber
einer euklidischen
Transformation des Bezugssystems eines Beobachters sind. Ausschlag gebend
ist dabei die Rotation des bewegten Systems relativ zum Körper. Die Drehung des
Bezugssystems des bewegten Beobachters relativ zum ruhenden wird mit einem orthogonalen
Tensor  aus der speziellen
orthogonalen Gruppe
aus der speziellen
orthogonalen Gruppe

beschrieben. Die Menge  enthält alle Tensoren zweiter Stufe,
enthält alle Tensoren zweiter Stufe,  bezeichnet die Transposition,
bezeichnet die Transposition,
 die Inverse
und „det“ die Determinante.
Die Tensoren aus dieser Gruppe führen Drehungen ohne Spiegelung aus. Stellt nun
der relativ zum Körper ruhende Beobachter in einem materiellen Punkt den
Deformationsgradienten
fest, so misst der bewegte Beobachter durch die euklidische Transformation
die Inverse
und „det“ die Determinante.
Die Tensoren aus dieser Gruppe führen Drehungen ohne Spiegelung aus. Stellt nun
der relativ zum Körper ruhende Beobachter in einem materiellen Punkt den
Deformationsgradienten
fest, so misst der bewegte Beobachter durch die euklidische Transformation

Die Rotation transformiert den Cauchy’schen Spannungstensor so, dass der bewegte Beobachter

feststellt. Die Bewegungsmöglichkeiten der Beobachter sind uneingeschränkt, so dass die obige Gleichung für alle orthogonalen Tensoren zutrifft und deshalb

gelten muss. Diese Bedingung ist in elastischen Fluiden immer erfüllt, während bei elastischen Feststoffen eine spezielle Modellierungsrichtlinie einzuhalten ist.
Elastische Fluide
Fluid ist der Sammelbegriff für Flüssigkeiten und Gase. Die elastische Flüssigkeit ist auch als ideale Flüssigkeit oder Euler-Flüssigkeit bekannt und das elastische Gas ist das reibungsfreie Gas. Innere Reibung, die sich in Viskosität und damit in Schubspannungen zeigen würde, wird in elastischen Fluiden vernachlässigt, weshalb der Spannungstensor dort Diagonalgestalt hat. Des Weiteren ist jedes Fluid auch isotrop. Wird nun ein Fluid gedanklich in zwei Teile zerschnitten, dann bilden sich an den Schnittflächen Schnittspannungen aus, die senkrecht zur Schnittfläche sind, denn der Druck in einem elastischen Fluid wirkt immer senkrecht auf begrenzende Flächen. Nun muss in einer isotropen Flüssigkeit die Normalspannung für alle Orientierungen der Schnittfläche dieselbe sein. Dies ist aber nur dann möglich, wenn der Spannungstensor ein Vielfaches des Einheitstensors ist:

Die skalare
Funktion  entspricht dem negativen Druck
entspricht dem negativen Druck  ,
der in Fluiden kinematisch nur von der Volumenänderung
,
der in Fluiden kinematisch nur von der Volumenänderung  ,
der Dichte
,
der Dichte

oder dem spezifischen Volumen

abhängt.
Der Materialparameter  ist die Dichte im Ausgangszustand bei
ist die Dichte im Ausgangszustand bei  .
Ein Spannungstensor dieser Form
.
Ein Spannungstensor dieser Form
![{\displaystyle {\boldsymbol {\sigma }}=-{\tilde {p}}[\operatorname {det} (\mathbf {F} )]\mathbf {1} =-p(\rho )\mathbf {1} =-{\bar {p}}(v)\mathbf {1} \,,}](/svg/5c874d97abbd5c5c5c558ec309a4c26ed89b71a3.svg)
wird Drucktensor genannt.
Materielle Objektivität von Fluiden
Bei Fluiden sind die Spannungen also proportional zum Einheitstensor und hängen nur von der Determinante des Deformationsgradienten ab, weshalb obige Bedingung für Objektivität
immer erfüllt ist:
![{\displaystyle \overbrace {{\tilde {p}}[\operatorname {det} (\mathbf {Q\cdot F} )]\mathbf {1} } ^{{\mathfrak {G}}(\mathbf {Q\cdot F} )}={\tilde {p}}[\operatorname {det} (\mathbf {Q} )\operatorname {det} (\mathbf {F} )]\mathbf {Q\cdot 1\cdot Q} ^{\top }=\mathbf {Q} \cdot \overbrace {{\tilde {p}}[\operatorname {det} (\mathbf {F} )]\mathbf {1} } ^{{\mathfrak {G}}(\mathbf {F} )}\cdot \mathbf {Q} ^{\top }\quad {\text{für alle}}\quad \mathbf {Q} \in {\mathcal {SO}}\,.}](/svg/c2d6d0a0e3997732ed1f5de625ce93c4cc0267aa.svg)
Materialgleichungen für elastische Fluide
Viele Materialgleichungen für elastische Fluide werden Zustandsgleichung genannt, was unterstreicht, dass der Druck in ihnen unter gleichen Bedingungen (Temperatur, Volumen, Stoffmenge) immer gleich ist, was ja Cauchy-Elastizität sicherstellt. Aus dem Volumen und der Stoffmenge ergibt sich die Dichte. Der denkbar einfachste Zusammenhang zwischen Druck und Dichte ist die Proportionalität

die das ideale Gas definiert, in dem der Proportionalitätsfaktor das Produkt aus einem Materialparameter R und der absoluten Temperatur T ist. Je niedriger der Druck und je höher die Temperatur ist, desto mehr verhält sich ein reales Gas wie ein ideales.
Mit Virialkoeffizienten
 kann die Ideale-Gas-Gleichung zu
kann die Ideale-Gas-Gleichung zu

erweitert werden, um so auch reale Gase und Phasenübergänge zu beschreiben. Der Faktor k ist die Boltzmann-Konstante. Jedoch ist auch diese Gleichung nur für verdünnte Gase geeignet.
Alternativ kann der Druck auch als Funktion des spezifischen Volumens v formuliert werden, wie z.B. in der Van-der-Waals-Gleichung

mit Materialparametern a, b und R.
Konservative Fluide
Ein barotropes
Cauchy-elastisches Fluid ist auch hyperelastisch,
denn die spezifische Spannungsleistung  ist wegen
ist wegen

die materielle
Zeitableitung einer skalaren Funktion w, was nur in hyperelastischen
Materialien der Fall ist. Die materielle Zeitableitung wird durch den Überpunkt
oder D/Dt unten angezeigt. In der Gleichungskette wurde das Frobenius-Skalarprodukt
„:“ des Drucktensors mit dem Verzerrungsgeschwindigkeitstensor d :=½
(l + lT) benutzt, der der symmetrische Anteil des Geschwindigkeitsgradienten
 ist. Die Divergenz
des Geschwindigkeitsfeldes
ist. Die Divergenz
des Geschwindigkeitsfeldes  ist gleich der Spur
des Geschwindigkeitsgradienten
ist gleich der Spur
des Geschwindigkeitsgradienten

Die auf die Dichte bezogene Divergenz ist aufgrund der lokalen räumlichen Massenbilanz

die materielle Zeitableitung des spezifischen Volumens. Daraus ergab sich schließlich die spezifische Formänderungsenergie

deren materielle Zeitableitung im Fall der Barotropie, wie in der Gleichungskette oben gezeigt, die spezifische Spannungsleistung des elastischen Fluides ist. Die Kompressionsleistung des Druckes wird im barotropen Fluid also vollständig und dissipationslos in Formänderungsenergie umgesetzt, weswegen elastische barotrope Fluide ausnahmslos konservativ sind.
Inkompressible Flüssigkeiten
In einer inkompressiblen
elastischen Flüssigkeit ist die Dichte in guter Näherung konstant und der Druck
ergibt sich nicht mehr aus der konstitutiven Gleichung, sondern aus den
Naturgesetzen und den Randbedingungen, kann aber immer noch vom Ort  und der Zeit
und der Zeit  abhängen
abhängen

Eulersche Gleichungen der Strömungsmechanik
Einsetzen des Drucktensors in die Impulsbilanz in der eulerschen Fassung führt auf die Eulerschen Gleichungen der Strömungsmechanik, die zusammen mit der Kontinuitätsgleichung reibungsfreie Strömungen modellieren. Die eulerschen Gleichungen sind eine gute Näherung bei laminaren Strömungen, wenn fluiddynamische Grenzschichten an den Rändern der Strömung keine wesentliche Rolle spielen.
Elastische Festkörper
Aus kontinuumsmechanischer Sicht unterscheiden sich Festkörper von Fluiden vor allem in zweierlei Hinsicht: Erstens vermögen sie im Gleichgewicht Scher- und Zugkräften standzuhalten und zweitens können sie anisotrop sein.
Materielle Objektivität von elastischen Festkörpern
Die in #Materielle Objektivität aufgeschriebene Bedingung für die Bezugssysteminvarianz
wird bei Festkörpern – anders als bei den Fluiden – nicht automatisch eingehalten, kann aber wie folgt sichergestellt werden.
Der Deformationsgradient
wird polar
in einen orthogonalen Tensor  und einen symmetrisch positiv
definiten rechten Strecktensor
und einen symmetrisch positiv
definiten rechten Strecktensor
 zerlegt:
zerlegt:

Nun kann  gewählt werden, so dass sich wegen
gewählt werden, so dass sich wegen 

ergibt. Dem Prinzip der materiellen Objektivität zufolge ist der zweite
Piola-Kirchhoff’sche Spannungstensor  in der Cauchy-Elastizität ausschließlich eine Funktion des aktuellen rechten
Strecktensors .
Diese Bedingung ist sowohl notwendig als auch hinreichend für die materielle
Objektivität. Die materielle Objektivität wird in Feststoffmodellen also durch
konstitutive Gleichungen in lagrangescher
Fassung sichergestellt. Zumeist wird
als Funktion des rechten Cauchy-Green Tensors
in der Cauchy-Elastizität ausschließlich eine Funktion des aktuellen rechten
Strecktensors .
Diese Bedingung ist sowohl notwendig als auch hinreichend für die materielle
Objektivität. Die materielle Objektivität wird in Feststoffmodellen also durch
konstitutive Gleichungen in lagrangescher
Fassung sichergestellt. Zumeist wird
als Funktion des rechten Cauchy-Green Tensors

oder des Green-Lagrange’schen Verzerrungstensors

modelliert, zum Beispiel:
 .
.
Cauchy-Ableitung
Ableitung der obigen Gleichung nach der Zeit liefert mit der Abkürzung  :
:

Auf der linken Seite der letzten Gleichung steht die objektive Cauchy-Ableitung[1]

die mit dem Geschwindigkeitsgradient

gebildet wird.
Lineare Cauchy-Elastizität
In der linearen Cauchy-Elastizität werden die sechs unabhängige Komponenten
der Dehnungen Eij linear mit den sechs unabhängigen Komponenten der
Spannungen  verknüpft
verknüpft

wofür maximal 36 unabhängige Koeffizienten Cijkl notwendig sind. Für die Beschreibung eines linearen Cauchy-elastischen Materials bedarf es also höchstens 36 Parametern. Erst in der Hyperelastizität gilt zusätzlich Cijkl=Cklij, sodass dort maximal 21 Parameter ausreichen.
Isotrope Cauchy-Elastizität
Soll der Cauchy’sche Spannungstensor ,
wie in der isotropen Hyperelastizität,
als Funktion des linken Cauchy-Green Tensors

ausgedrückt werden, also  ,
fordert das Prinzip der materiellen Objektivität:
,
fordert das Prinzip der materiellen Objektivität:

also

Eine Funktion mit dieser Eigenschaft ist eine isotrope
Tensorfunktion. Eine solche Funktion  kann in der Form
kann in der Form

dargestellt werden, wo die Koeffizienten  skalare Funktionen der Hauptinvarianten
oder anderer Invarianten von
skalare Funktionen der Hauptinvarianten
oder anderer Invarianten von  sind. Nach dem Satz
von Cayley-Hamilton kann gleichbedeutend
sind. Nach dem Satz
von Cayley-Hamilton kann gleichbedeutend

mit anderen Koeffizienten  geschrieben werden. Jedenfalls kommutieren
und :
geschrieben werden. Jedenfalls kommutieren
und :

Insbesondere ist bei Hyperelastizität

wo die Ableitung[2]
der Formänderungsenergiedichte  nach
eine isotrope Tensorfunktion ist.
nach
eine isotrope Tensorfunktion ist.
Navier-Cauchy-Gleichungen
In der linearen isotropen Elastizität ist der Spannungstensor
bei kleinen
Verformungen eine lineare isotrope Tensorfunktion des linearisierten
Verzerrungstensors  :
:

Darin sind  die erste und zweite Lamé-Konstanten.
Diese Materialgleichung ist als Hookesches
Gesetz bekannt und gleichzeitig auch hyperelastisch. Wird der
Verzerrungstensor durch die Verschiebungen
die erste und zweite Lamé-Konstanten.
Diese Materialgleichung ist als Hookesches
Gesetz bekannt und gleichzeitig auch hyperelastisch. Wird der
Verzerrungstensor durch die Verschiebungen  ausgedrückt und in das erste
Cauchy-Eulersche Bewegungsgesetz eingesetzt, das der lokalen Impulsbilanz
entspricht, führt das auf die Navier-Cauchy-Gleichungen.
ausgedrückt und in das erste
Cauchy-Eulersche Bewegungsgesetz eingesetzt, das der lokalen Impulsbilanz
entspricht, führt das auf die Navier-Cauchy-Gleichungen.
Thermodynamische Konsistenz
Auch wenn in einem Cauchy-elastischen Material die Spannungen ausschließlich durch den aktuellen Verformungszustand bestimmt sind, wird im Allgemeinen die Formänderungsarbeit vom Weg, auf dem die Verformung durchgeführt wird, abhängen. In Abwesenheit eines Dissipationsmechanismus ist das aber im Widerspruch zu thermodynamischen Prinzipien.
Das zeigt auch die Auswertung der Clausius-Duhem-Ungleichung, die den zweiten Hauptsatz der Thermodynamik in der Festkörpermechanik repräsentiert. Bei isothermer Zustandsänderung lautet die Clausius-Duhem-Ungleichung

worin  die helmholtzsche
freie Energie in der lagrangeschen
Formulierung darstellt. Wenn die freie Energie eine Funktion nur der Dehnung
ist, was bei Cauchy-Elastizität plausibel ist, dann folgt[2]
die helmholtzsche
freie Energie in der lagrangeschen
Formulierung darstellt. Wenn die freie Energie eine Funktion nur der Dehnung
ist, was bei Cauchy-Elastizität plausibel ist, dann folgt[2]

Diese Ungleichung muss für alle möglichen Prozesse erfüllt sein, weswegen der Term in den Klammern, weil er nicht von der Verzerrungsgeschwindigkeit abhängt, verschwinden muss und mithin

gilt. Ein Material mit einer solchen Materialgleichung ist hyperelastisch. In der Hyperelastizität ist die Formänderungsarbeit wegunabhängig.
Eine Wegabhängigkeit der Formänderungsarbeit tritt im folgenden Beispiel auf.
Beispiel
Das Materialmodell

mit Materialparametern  und
und  ist Cauchy-elastisch und erfüllt das Kriterium der materiellen Objektivität. Die
Frobeniusnorm
ist Cauchy-elastisch und erfüllt das Kriterium der materiellen Objektivität. Die
Frobeniusnorm  wird mit dem Spur-Operator
wird mit dem Spur-Operator  berechnet
berechnet

und ist eine Invariante des Arguments  .
Die Funktion "
.
Die Funktion " "
ist der natürliche
Logarithmus, der Parameter
"
ist der natürliche
Logarithmus, der Parameter  entspricht dem Schubmodul
und
entspricht dem Schubmodul
und  reguliert die Kompressibilität.
Mit
reguliert die Kompressibilität.
Mit  ist das Modell von Simo und Pister und hyperelastisch[3].
Wegen
ist das Modell von Simo und Pister und hyperelastisch[3].
Wegen  und
und  bekommt man den Cauchy’schen Spannungstensor
bekommt man den Cauchy’schen Spannungstensor

in Abhängigkeit vom linken Strecktensor .
Die Koeffizienten  lauten also
lauten also

Im entspannten Zustand ist  und daher
und daher  .
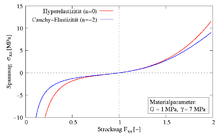
Das Bild zeigt den Verlauf der Cauchy-Spannung bei Materialparametern G =
1 Megapascal
und γ =7 MPa in einem einaxialen Zugversuch.
.
Das Bild zeigt den Verlauf der Cauchy-Spannung bei Materialparametern G =
1 Megapascal
und γ =7 MPa in einem einaxialen Zugversuch.
Mit  ist die Formänderungsarbeit wegabhängig, wie nun gezeigt wird. In einem
materiellen Punkt sei im Zeitintervall
ist die Formänderungsarbeit wegabhängig, wie nun gezeigt wird. In einem
materiellen Punkt sei im Zeitintervall ![t\in [0,1]](/svg/31a5c18739ff04858eecc8fec2f53912c348e0e5.svg) der Deformationsgradient
der Deformationsgradient

mit dem Parameter  im Pfad 1 und
im Pfad 1 und  im Pfad 2 vorgegeben. Die beiden Pfade haben im vorgegebenen Zeitintervall
dieselben Anfangs- und End-Punkte. Nun kann man die Verformungsleistungsdichte
im Pfad 2 vorgegeben. Die beiden Pfade haben im vorgegebenen Zeitintervall
dieselben Anfangs- und End-Punkte. Nun kann man die Verformungsleistungsdichte
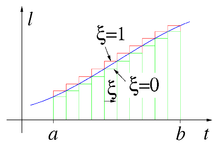
 entlang der beiden Verformungspfade mit einer Treppenfunktion
numerisch zur verrichteten Formänderungsarbeitsdichte
integrieren,
siehe Abbildung rechts:
entlang der beiden Verformungspfade mit einer Treppenfunktion
numerisch zur verrichteten Formänderungsarbeitsdichte
integrieren,
siehe Abbildung rechts:

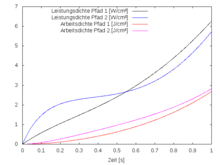

Weil die Leistung bei n = −2 monoton mit der Zeit steigt, siehe Abbildung rechts, erhält man mit ξ = 0 eine untere und mit ξ = 1 eine obere Schranke für die verrichtete Spannungsarbeit. Mit den Materialparametern G = 1 MPa und γ =7 MPa berechnet man:

Ein MPa entspricht einem Joule pro Kubikzentimeter (J/cm³). Mit n = −2 wird entlang der beiden Pfade also unterschiedliche Formänderungsarbeit geleistet, weswegen das Material dann nicht hyperelastisch ist.
Man könnte nun entlang des ersten Pfades mit einem Arbeitsaufwand von weniger als 2,7 J/cm³ belasten und entlang des zweiten Pfades entlasten, wobei mehr als 2,8 J/cm³ heraussprängen. Pro Zyklus würde man also mehr als 0,1 J/cm³ Energie erhalten. Durch mehrmaliges Durchfahren des Zyklus könnte man so beliebig viel Energie erzeugen. Das aber widerspricht thermodynamischen Prinzipien. Die Hyperelastizität, die ein Spezialfall der Cauchy-Elastizität ist, vermeidet diesen Widerspruch.
Siehe auch
Anmerkungen
- ↑ Diese Ableitung wird auch nach C. Truesdell benannt. Er selbst benannte die Ableitung aber nach Cauchy und schrieb 1963, dass diese Rate ohne erfindlichen Grund nach ihm benannt wurde ( „came to be named, for no good reason, after [...] me“ ) siehe C. Truesdell: Remarks on Hypo-Elasticity, Journal of Research of the National Bureau of Standards - B. Mathematics and Mathematical Physics, Vol. 67B, No. 3, July-September 1963, S. 141.
- ↑ a
b
Die Fréchet-Ableitung
einer skalaren Funktion
 nach einem Tensor
nach einem Tensor  ist der Tensor
ist der Tensor  der – sofern er existiert – in alle Richtungen
der – sofern er existiert – in alle Richtungen  dem Gâteaux-Differential
entspricht, also
dem Gâteaux-Differential
entspricht, also
 ist eine reelle
Zahl. Dann wird auch
ist eine reelle
Zahl. Dann wird auch
- ↑
J. C. Simo, K. S. Pister: Remarks on Rate
Constitutive Equations for Finite Deformation Problems: Computational
Implications. In: Computer Methods in Applied Mechanics and
Engineering. 46, 1984, S. 201–215.
Die zugehörige Formänderungsenergiedichte ist



Literatur
- H. Altenbach: Kontinuumsmechanik. Springer, 2012, ISBN 978-3-642-24118-5.
- M. Bestehorn: Hydrodynamik und Strukturbildung. Springer, 2006, ISBN 978-3-540-33796-6.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 01.05. 2025