Hookesches Gesetz

Das hookesche Gesetz (nach Robert Hooke, der es 1676 erstmals als Anagramm und 1678[1] aufgelöst publizierte) beschreibt die elastische Verformung von Festkörpern, wenn deren Verformung proportional zur einwirkenden Belastung ist (linear-elastisches Verhalten). Dieses Verhalten („Ut tensio sic vis“) tritt typischerweise bei Metallen auf, solange die Belastung innerhalb der elastischen Grenze bleibt, sowie bei harten, spröden Materialien wie Glas, Keramik oder Silizium, oft bis zum Bruch.
Das hookesche Gesetz stellt den linearen Sonderfall des Elastizitätsgesetzes dar, wobei nur der proportionale Zusammenhang zwischen Spannung und
Verformung berücksichtigt wird. Nicht-lineare elastische Verformungen, wie sie bei Gummiauftreten, sowie
duktile und plastische Verformungen, beispielsweise bei Metallen
nach Überschreiten der Fließgrenze, bleiben unberücksichtigt. Zudem müssen Spannung und Verformung nicht entlang derselben Achse wirken; eine Verformung in
 -Richtung
kann eine Spannung in
-Richtung
kann eine Spannung in  -Richtung verursachen.
Das hookesche Gesetz wird daher allgemein als Tensorbeziehung formuliert.
-Richtung verursachen.
Das hookesche Gesetz wird daher allgemein als Tensorbeziehung formuliert.
In den rheologischen Modellen wird das Gesetz durch das Hooke-Element repräsentiert.
Hookesches Gesetz für Federsysteme
Das hookesche Gesetz besagt, dass die Dehnung  linear von der wirkenden Kraft
linear von der wirkenden Kraft  abhängt, und lässt
sich als Formel folgendermaßen ausdrücken:
abhängt, und lässt
sich als Formel folgendermaßen ausdrücken:
 beziehungsweise
beziehungsweise 
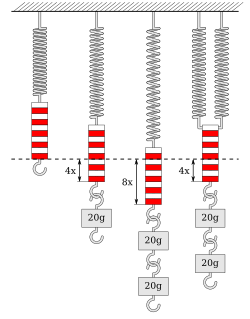
Die Federkonstante
 dient als Proportionalitätsfaktor und beschreibt die Steifigkeit der Feder. Bei einer Schraubenfeder zeigt sich das lineare Verhalten bei Belastung mit einem Gewicht. Nach Verdoppelung des Gewichts tritt auch
die doppelte Dehnung auf.
dient als Proportionalitätsfaktor und beschreibt die Steifigkeit der Feder. Bei einer Schraubenfeder zeigt sich das lineare Verhalten bei Belastung mit einem Gewicht. Nach Verdoppelung des Gewichts tritt auch
die doppelte Dehnung auf.
Diese Eigenschaft ist maßgeblich zum Beispiel für die Verwendung von Metallfedern als Kraftmesser und in Waagen. Bei anderen Materialien – wie zum Beispiel Gummi – ist der Zusammenhang zwischen einwirkender Kraft und Ausdehnung nicht linear.
Das hookesche Gesetz findet nicht nur in der Mechanik, sondern auch in anderen Bereichen der Physik Anwendung. In der Quantenmechanik etwa lässt
sich für hinreichend kleine
über die Anwendung des hookeschen Gesetzes
der quantenmechanische harmonische Oszillator beschreiben. Ein weiteres Beispiel ist die Molekularphysik. Hier kann, analog zur Federkonstanten, die Linearität zu
durch eine
Kraftkonstante ausgedrückt werden. Diese Kraftkonstante beschreibt dann die Stärke einer chemischen Bindung.
Die in einer Feder durch Dehnung entstehende potentielle Energie kann folgendermaßen berechnet werden. Gegeben ist eine Auslenkung vom Betrag
 ,
die die Auslenkung aus der Ruhelage (
,
die die Auslenkung aus der Ruhelage ( , Gleichgewichtslage)
beschreibt. Die Kraft ist proportional zur Auslenkung, nämlich
, Gleichgewichtslage)
beschreibt. Die Kraft ist proportional zur Auslenkung, nämlich
 .
Durch Integration der Kraft erhält man nun die potentielle Energie:
.
Durch Integration der Kraft erhält man nun die potentielle Energie:

Dies ist das für viele Modellrechnungen wichtige harmonische Potential (proportional zu
 ).
).
Eindimensionaler Fall
Auf einen Stab der Länge  und der Querschnittsfläche
und der Querschnittsfläche  wirkt eine Zug- oder Druckbelastung (Kraft) entlang der
-Achse
und bewirkt im Stab eine Spannung in
-Richtung:
wirkt eine Zug- oder Druckbelastung (Kraft) entlang der
-Achse
und bewirkt im Stab eine Spannung in
-Richtung:

Dadurch ergibt sich eine Dehnung  des Stabes in -Richtung:
des Stabes in -Richtung:

Die Dehnung des Stabes hängt dabei von der wirkenden Kraft, hier der Spannung im Stab, ab. Die Proportionalitätskonstante
 repräsentiert den Elastizitätsmodul des Materials, aus dem der Stab besteht.
repräsentiert den Elastizitätsmodul des Materials, aus dem der Stab besteht.

Durch Einsetzen der ersten beiden Formeln und Umstellen ergibt sich die folgende Darstellung:

Das hookesche Gesetz kann also dort angewendet werden, wo die wirkende Kraft nahezu linear von der Auslenkung oder Ausdehnung abhängt, und ist eine Verallgemeinerung des hookeschen Gesetzes für Federn.
Verallgemeinertes hookesches Gesetz
Im allgemeinen Fall wird das hookesche Gesetz durch eine lineare Tensorgleichung (4. Stufe) ausgedrückt:
 ,
,
mit dem Elastizitätstensor  ,
der die elastischen Eigenschaften der deformierten Materie kennzeichnet. Da der Tensor
81 Komponenten
,
der die elastischen Eigenschaften der deformierten Materie kennzeichnet. Da der Tensor
81 Komponenten
 aufweist, ist er schwierig zu handhaben.
Aufgrund der Symmetrie von Verzerrungs- und Spannungstensor reduziert sich die Zahl der
unabhängigen Komponenten
aufweist, ist er schwierig zu handhaben.
Aufgrund der Symmetrie von Verzerrungs- und Spannungstensor reduziert sich die Zahl der
unabhängigen Komponenten
 nach Überführung in Konstanten
nach Überführung in Konstanten
 anhand des Schemas 11 → 1, 22 → 2, 33 → 3, 23 → 4, 31 → 5, 12 → 6 jedoch auf 36. Damit lässt sich das hookesche Gesetz in eine einfacher zu handhabende Matrixgleichung überführen, wobei die elastischen Konstanten in einer
anhand des Schemas 11 → 1, 22 → 2, 33 → 3, 23 → 4, 31 → 5, 12 → 6 jedoch auf 36. Damit lässt sich das hookesche Gesetz in eine einfacher zu handhabende Matrixgleichung überführen, wobei die elastischen Konstanten in einer
 -Matrix,
sowie die Verzerrung und die Spannung als sechskomponentige Vektoren dargestellt werden:
-Matrix,
sowie die Verzerrung und die Spannung als sechskomponentige Vektoren dargestellt werden:

Aus energetischen Überlegungen ergibt sich, dass auch diese
-Matrix
symmetrisch ist. Die Anzahl der unabhängigen
 (elastische Konstanten) reduziert sich damit weiter auf maximal 21.
(elastische Konstanten) reduziert sich damit weiter auf maximal 21.
Die maximal sechs Unabhängigen der beiden symmetrischen Tensoren für Dehnung und Spannung werden somit auf zwei sechskomponentige Vektoren verteilt (Voigtsche Notation). Bei
 und
und  muss man aufpassen, weil hier ein zusätzlicher Faktor 2 dazu kommt und nicht nur die Indizes angepasst werden.
muss man aufpassen, weil hier ein zusätzlicher Faktor 2 dazu kommt und nicht nur die Indizes angepasst werden.
Isotrope Medien
Im Spezialfall isotroper Medien reduziert sich die Anzahl der unabhängigen elastischen Konstanten von 21 auf 2. Wesentliche Eigenschaften der Deformation lassen sich dann durch die Querkontraktionszahl charakterisieren. Das hookesche Gesetz lässt sich dann darstellen in der Form
 , mit
, mit , bzw.
, bzw. ,
,
wobei
der Elastizitätsmodul (auch Young’s modulus) und
 die Querkontraktionszahl sind. Beide sind vom Werkstoff bestimmt. Für eindimensionale Deformationen vereinfacht sich die Beziehung zu
die Querkontraktionszahl sind. Beide sind vom Werkstoff bestimmt. Für eindimensionale Deformationen vereinfacht sich die Beziehung zu
 .
.
Schreibweise mit Lamé-Konstanten
Häufig findet sich für das verallgemeinerte hookesche Gesetz für isotrope Medien auch eine Schreibweise mit Hilfe der Lamé-Konstanten:

oder ausgeschrieben:
 .
.
Die Gleichung ist komponentenweise zu verstehen, z. B. gilt
 . Die umgekehrte Beziehung lautet
. Die umgekehrte Beziehung lautet
 .
.
Darin ist  der Elastizitätsmodul. Die Materialkonstante
der Elastizitätsmodul. Die Materialkonstante
 heißt im deutschen Sprachraum Schubmodul und hat hier das Formelzeichen
heißt im deutschen Sprachraum Schubmodul und hat hier das Formelzeichen
 .
.
Ebener Spannungs- und Dehnungszustand
Scheiben sind ebene Flächenträger, die per Definition nur in ihrer Ebene belastet werden. Stäbe und Balken sind schlanke Träger, bei denen zwei Abmessungen klein sind gegenüber der dritten axialen. Wenn keine Belastungen senkrecht zur Ebene bzw. Längsachse dieser Träger auftreten, herrscht in ihnen ein ebener Spannungszustand (ESZ), in dem alle Spannungskomponenten senkrecht zur betrachteten Ebene vernachlässigt werden können.
Flächenträger, die auch senkrecht zu ihrer Ebene belastet werden, bezeichnet man als Platten. Ist diese Platte so dick, dass sie durch die senkrecht auf sie wirkende Belastung nicht merklich zusammengedrückt wird, herrscht in ihrer Ebene ein ebener Verzerrungszustand (EVZ), in dem alle Verzerrungskomponenten senkrecht zur betrachteten Ebene vernachlässigt werden können.
Stäbe, Balken, Scheiben und Platten sind im Maschinenbau und Bauwesen weit verbreitete Konstruktionselemente. Daher lohnt es sich, die Elastizitätsbeziehung für den ESZ und EVZ aufzuschreiben.
Ebener Spannungszustand
Der ESZ entspricht in obiger Beziehung der Bedingung
 .
Dadurch vereinfacht sich die Elastizitätsbeziehung zu
.
Dadurch vereinfacht sich die Elastizitätsbeziehung zu

bzw.

und  .
.
Ebener Verzerrungszustand
Im EVZ gilt  .
Hieraus können dann folgende Zusammenhänge abgeleitet werden:
.
Hieraus können dann folgende Zusammenhänge abgeleitet werden:
 .
.
bzw.

mit  .
.
Literatur
- Karl-Eugen Kurrer: Geschichte der Baustatik. Auf der Suche nach dem Gleichgewicht, Ernst und Sohn, Berlin 2016, S. 401f, ISBN 978-3-433-03134-6.
- Rolf D. Mahnken: Lehrbuch der Technischen Mechanik – Elastostatik, 1. Aufl. Springer Vieweg, Berlin 2015, ISBN 978-3-662-44797-0.
- Sabina Muminovic: Die Kraft des Robert Hooke: Die wissenschaftshistorische Kontextualisierung des Hookeschen Gesetzes (= Peter Heering [Hrsg.]: Flensburg Studies on the History and Philosophy of Science and Science Education. Band 7). wbg Academic, Darmstadt 2022, ISBN 978-3-534-45026-8.
- Ulrich Niewöhner-Desbordes: Hookesches Gesetz. In: Werner E. Gerabek, Bernhard D. Haage, Gundolf Keil, Wolfgang Wegner (Hrsg.): Enzyklopädie Medizingeschichte. De Gruyter, Berlin/New York 2005, ISBN 3-11-015714-4, S. 616.
- Walter Schnell, Dietmar Gross, Werner Hauger: Technische Mechanik, Band 2: Elastostatik. Springer, Berlin 1998, ISBN 3-540-64147-5.
Siehe auch
Weblinks
-
 Gesetz von Hooke
bei LEIFIphysik (auf Schulniveau)
Gesetz von Hooke
bei LEIFIphysik (auf Schulniveau)
Einzelnachweise
- ↑ Robert Hooke: De Potentia Restitutiva, or of Spring Explaining the Power of Springing Bodies. London 1678.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 17.07. 2025