Lagrange-Formalismus
Der Lagrange-Formalismus ist in der Physik eine 1788 von Joseph-Louis Lagrange eingeführte Formulierung der klassischen Mechanik, in der die Dynamik eines Systems durch eine einzige skalare Funktion, die Lagrange-Funktion, beschrieben wird. Der Formalismus ist (im Gegensatz zu der newtonschen Mechanik, die a priori nur in Inertialsystemen gilt) auch in beschleunigten Bezugssystemen gültig. Der Lagrange-Formalismus ist invariant gegen Koordinatentransformationen. Aus der Lagrange-Funktion lassen sich die Bewegungsgleichungen mit den Euler-Lagrange-Gleichungen der Variationsrechnung aus dem Prinzip der kleinsten Wirkung bestimmen. Diese Betrachtungsweise vereinfacht viele physikalische Probleme, da sich, im Gegensatz zu der newtonschen Formulierung der Bewegungsgesetze, im Lagrange-Formalismus Zwangsbedingungen relativ einfach durch das explizite Ausrechnen der Zwangskräfte oder die geeignete Wahl generalisierter Koordinaten berücksichtigen lassen. Aus diesem Grund wird der Lagrange-Formalismus verbreitet bei Mehrkörpersystemen (MKS) eingesetzt. Er lässt sich auch auf den relativistischen Fall übertragen und ist auch in der relativistischen Quantenfeldtheorie zur Formulierung von Modellen von Elementarteilchen und ihrer Wechselwirkungen weit verbreitet.
Für Systeme mit einem generalisierten Potential und holonomen Zwangsbedingungen lautet die Lagrange-Funktion
wobei  die kinetische
Energie und
die kinetische
Energie und  die potentielle
Energie des betrachteten Systems bezeichnen. Man unterscheidet sogenannte
Lagrange-Gleichungen erster und zweiter Art. Im engeren Sinn versteht man unter
dem Lagrange-Formalismus und den Lagrange-Gleichungen aber die zweiter
Art, die häufig einfach als Lagrange-Gleichungen bezeichnet werden:
die potentielle
Energie des betrachteten Systems bezeichnen. Man unterscheidet sogenannte
Lagrange-Gleichungen erster und zweiter Art. Im engeren Sinn versteht man unter
dem Lagrange-Formalismus und den Lagrange-Gleichungen aber die zweiter
Art, die häufig einfach als Lagrange-Gleichungen bezeichnet werden:

Dabei sind  generalisierte Koordinaten und
generalisierte Koordinaten und  deren Zeitableitungen.
deren Zeitableitungen.
Lagrange-Gleichungen erster und zweiter Art
Mit den Lagrange-Gleichungen erster Art lassen sich die Zwangskräfte
berechnen. Sie sind äquivalent zu den Gleichungen, die sich aus dem D’Alembertschen
Prinzip ergeben. Wir betrachten  Punktteilchen im
Punktteilchen im  mit den Ortsvektoren
mit den Ortsvektoren  ,
,
 ,
deren Koordinaten durch
,
deren Koordinaten durch  voneinander unabhängige (holonome)
Zwangsbedingungen der
Form
voneinander unabhängige (holonome)
Zwangsbedingungen der
Form  mit
mit  eingeschränkt sind (eine explizite Zeitabhängigkeit ist erlaubt). Dadurch werden
die Lagen der Teilchen auf eine
eingeschränkt sind (eine explizite Zeitabhängigkeit ist erlaubt). Dadurch werden
die Lagen der Teilchen auf eine  -dimensionale
Mannigfaltigkeit
eingeschränkt (
-dimensionale
Mannigfaltigkeit
eingeschränkt ( ist die Anzahl der Freiheitsgrade).
ist die Anzahl der Freiheitsgrade).
Die auf ein Teilchen  wirkenden Zwangskräfte sind proportional zum Gradienten
wirkenden Zwangskräfte sind proportional zum Gradienten  ,
die Gesamt-Zwangskraft
,
die Gesamt-Zwangskraft  ist daher
ist daher

Wenn man annimmt, dass sich die äußeren Kräfte aus einem Potential ableiten lassen, kann man die Bewegungsgleichung schreiben (Lagrange-Gleichung 1. Art):

Die  sind die Massen der
Punktteilchen,
ist die potentielle Energie. Dies, zusammen mit den Zwangsbedingungen ,
sind
sind die Massen der
Punktteilchen,
ist die potentielle Energie. Dies, zusammen mit den Zwangsbedingungen ,
sind  unabhängige Gleichungen für die
unabhängige Gleichungen für die  Koordinaten der
Koordinaten der  sowie für die
Lagrange-Multiplikatoren
sowie für die
Lagrange-Multiplikatoren  .
Somit ist die Lösung des Gleichungssystems eindeutig.
.
Somit ist die Lösung des Gleichungssystems eindeutig.
Bemerkung: Hier wurden nur holonome Zwangsbedingungen behandelt. Der
Formalismus lässt sich aber auch auf Zwangsbedingungen der Form  anwenden, die z.B. bei nicht-holonomen Zwangsbedingungen zwischen den
Geschwindigkeiten der Teilchen folgen. [3]
Diese Zwangsbedingungsgleichungen lassen sich im Gegensatz zu holonomen
Zwangsbedingungen nicht als vollständiges
Differential einer Funktion darstellen, das heißt zwischen den
Koeffizientenfunktionen gilt nicht
anwenden, die z.B. bei nicht-holonomen Zwangsbedingungen zwischen den
Geschwindigkeiten der Teilchen folgen. [3]
Diese Zwangsbedingungsgleichungen lassen sich im Gegensatz zu holonomen
Zwangsbedingungen nicht als vollständiges
Differential einer Funktion darstellen, das heißt zwischen den
Koeffizientenfunktionen gilt nicht  .
.
Im Fall von holonomen Zwangsbedingungen kann man neue Koordinaten
einführen, die diese implizit enthalten, sogenannte generalisierte
Koordinaten. Mit der kinetischen Energie

und Potentialkräften

(die auch durch generalisierte Koordinaten ausgedrückt sind und dann als generalisierte Kräfte bezeichnet werden – sie haben nicht unbedingt die Dimension einer Kraft) lassen sich die Bewegungsgleichungen auch schreiben

oder mit der Lagrange-Funktion  (Lagrange-Gleichung 2. Art):
(Lagrange-Gleichung 2. Art):

Treten wie in diesem Fall nur aus einem Potential ableitbare Kräfte (Potentialkräfte) auf, spricht man von konservativen Kräften.
Bemerkung: Manchmal lassen sich die generalisierten Kräfte durch ein
geschwindigkeitsabhängiges generalisiertes Potential  in folgender Form schreiben
in folgender Form schreiben

Auch dann ergeben sich die Bewegungsgleichungen
 ,
,
mit der Lagrange-Funktion  :
:

Das System ist dann aber nicht mehr im üblichen Sinn konservativ. Ein Beispiel ist das elektromagnetische Feld (siehe unten).
Manchmal hat man aber noch nicht-konservative Kräfte  ,
so dass sich die Gleichungen schreiben:
,
so dass sich die Gleichungen schreiben:

Ein Beispiel sind Systeme mit nicht-holonomen Zwangsbedingungen (siehe oben) oder Reibungskräften.
Ableitung aus dem Hamiltonschen Prinzip
Die Lagrange-Gleichungen zweiter Art ergeben sich als sogenannte
Euler-Lagrange-Gleichungen [4]
eines Variationsproblems und liefern die Bewegungsgleichungen, wenn die
Lagrange-Funktion gegeben ist. Sie folgen aus der Variation des mit
der Lagrange-Funktion gebildeten Wirkungsintegrals im
Hamiltonschen
Prinzip. Dazu betrachtet man alle möglichen Bahnkurven  im Raum der generalisierten
Koordinaten zwischen festen Anfangs- und Endpunkten. Man betrachtet die
Änderung des Wirkungsintegrals bei Variation der Bahnkurven
im Raum der generalisierten
Koordinaten zwischen festen Anfangs- und Endpunkten. Man betrachtet die
Änderung des Wirkungsintegrals bei Variation der Bahnkurven


Das hamiltonsche Prinzip besagt, dass für die klassische Bahn das Wirkungsintegral stationär unter Variation der Bahnkurven ist:

Eine Näherung in erster Ordnung lautet für eine gewöhnliche Funktion 

also
 .
.
In erster Ordnung ergibt sich die Variation des Integrals also zu
 .
.
Nun führt man eine partielle Integration in dem Term aus, der die Ableitung nach der Zeit enthält:
![\int_{t_1}^{t_2} \text{d}t \left(\frac{\partial L}{\partial \dot q} \frac{\text{d}}{\text{d}t} \delta q \right) = \left[\frac{\partial L}{\partial \dot q}\delta q\right]_{t_1}^{t_2} - \int_{t_1}^{t_2} \text{d}t \left( \delta q \frac{\text{d}}{\text{d}t} \frac{\partial L}{\partial \dot q} \right)](/svg/c08646c8e3ec8d8caace73146825e6ae475ad967.svg) .
.
Hierbei wird benutzt, dass

ist, da Anfangs- und Endpunkt festgehalten werden. Daher gilt für die Randterme
![\left[\frac{\partial L}{\partial \dot q}\delta q\right]_{t_1}^{t_2} = 0](/svg/f55e9556569f9eacf844f688a12f53152db63f65.svg)
Damit resultiert schließlich

Da nun  als Faktor des gesamten Integrals auftritt und beliebig ist, kann das Integral
nur dann nach dem Variationsprinzip verschwinden, wenn der Integrand selbst
verschwindet. Es folgen die Lagrange-Gleichungen oder
Lagrange-Gleichungen zweiter Art (die Euler-Lagrange-Gleichungen
des hier betrachteten Variationsproblems):
als Faktor des gesamten Integrals auftritt und beliebig ist, kann das Integral
nur dann nach dem Variationsprinzip verschwinden, wenn der Integrand selbst
verschwindet. Es folgen die Lagrange-Gleichungen oder
Lagrange-Gleichungen zweiter Art (die Euler-Lagrange-Gleichungen
des hier betrachteten Variationsproblems):
Für jede generalisierte Koordinate
(und die zugehörige generalisierte Geschwindigkeit )
gibt es eine solche Gleichung. Die Lagrange-Gleichungen bilden ein System gewöhnlicher
Differentialgleichungen zweiter Ordnung bezüglich der Zeitableitung. Wie
viele Differentialgleichungen das im Endeffekt sind, weiß man erst, wenn die
Zahl der Freiheitsgrade
des "Systems" berechnet wurde.
Zyklische Variablen und Symmetrie
Wenn die Lagrange-Funktion
nicht von einer Koordinate  abhängt, sondern nur von der zugehörigen Geschwindigkeit
abhängt, sondern nur von der zugehörigen Geschwindigkeit  ,
dann nennt man
zyklisch, zyklische Koordinate oder zyklische Variable. Der
zur zyklischen Variablen
konjugierte
Impuls
,
dann nennt man
zyklisch, zyklische Koordinate oder zyklische Variable. Der
zur zyklischen Variablen
konjugierte
Impuls

ist eine Erhaltungsgröße: ihr Wert ändert sich nicht während der Bewegung,
wie gleich gezeigt wird. Wenn die Lagrange-Funktion nicht von
abhängt, gilt

Dann folgt aber aus der Euler-Lagrange-Gleichung, dass die Zeitableitung des zugehörigen konjugierten Impulses verschwindet und er somit zeitlich konstant ist:

Allgemeiner gehört nach dem Noether-Theorem
zu jeder kontinuierlichen Symmetrie
der Wirkung eine Erhaltungsgröße.
Bei einer zyklischen Variablen ist die Wirkung invariant unter der Verschiebung
von
um eine beliebige Konstante, 
Erweiterung auf Felder
In der Feldtheorie ergibt sich die Bewegungsgleichung aus dem hamiltonschen Prinzip für Felder zu

wobei  das betrachtete Feld
und
das betrachtete Feld
und  die Lagrange-Dichte
sind.
die Lagrange-Dichte
sind.
Man kann dies in Kurzform auch schreiben als

mit der so definierten Variationsableitung
 .
.
Hinweis: Der Lagrange-Formalismus ist auch der Ausgangspunkt vieler Formulierungen der Quantenfeldtheorie.
Relativistische Mechanik
In der relativistischen Mechanik kann die Lagrange-Funktion eines freien Teilchens aus dem hamiltonschen Prinzip abgeleitet werden, indem für die Wirkung der einfachste Fall eines relativistischen Skalars angenommen wird:

wobei  das zur Eigenzeit
proportionale relativistische Linienelement ist und ein konstanter Faktor
das zur Eigenzeit
proportionale relativistische Linienelement ist und ein konstanter Faktor  gewählt wurde.
gewählt wurde.
Die Lagrange-Funktion eines freien Teilchens ist hier nicht mehr mit der
kinetischen Energie identisch (manchmal spricht man deshalb auch von kinetischer
Ergänzungsenergie T in der Lagrange-Funktion). Die relativistische kinetische
Energie eines Körpers mit der Masse  und Geschwindigkeit
und Geschwindigkeit  ohne Zwangsbedingungen beträgt
ohne Zwangsbedingungen beträgt

während für die Lagrange-Funktion die kinetische Ergänzungsenergie

maßgeblich ist. Die Lagrange-Funktion für ein Teilchen in einem Potential V ergibt sich dann zu

Für ein -Teilchensystem
ist die Lagrange-Funktion mit den generalisierten Koordinaten

wobei  die Anzahl der Freiheitsgrade und
die Anzahl der holonomen Zwangsbedingungen ist.
die Anzahl der Freiheitsgrade und
die Anzahl der holonomen Zwangsbedingungen ist.
Für kleine Geschwindigkeiten  kann man die Wurzel bis zur ersten Ordnung entwickeln
kann man die Wurzel bis zur ersten Ordnung entwickeln  :
:

Die nullte Ordnung der Entwicklung ist eine Konstante, die negative Ruheenergie. Da die Lagrange-Gleichungen invariant sind unter Addition einer Konstanten zur Lagrange-Funktion, kann man den konstanten ersten Term weglassen und man erhält wieder die klassische kinetische Energie:


Zusammenhang mit Pfadintegralen in der Quantenmechanik
Richard
Feynman hat als Erster diese Herangehensweise auch konsequent für die
Herleitung der Gleichungen der Quantenmechanik
verwendet. In der klassischen Physik ergeben sich die oben beschriebenen
Lagrange-Gleichungen aus der Forderung, dass das Wirkungsintegral stationär
wird. In Feynmans Pfadintegral-Formalismus
ist die quantenmechanische Wahrscheinlichkeitsamplitude, dass ein System
zwischen Anfangs- und Endbedingungen einen bestimmten Pfad einschlägt,
proportional  mit dem Wirkungsintegral
mit dem Wirkungsintegral  .
Pfade in der Umgebung des klassischen Weges, für den die Variation von
verschwindet, liefern dabei meist die Hauptbeiträge, da sich in ihrer Umgebung
die Beiträge mit fast gleichen Phasenfaktoren addieren.
.
Pfade in der Umgebung des klassischen Weges, für den die Variation von
verschwindet, liefern dabei meist die Hauptbeiträge, da sich in ihrer Umgebung
die Beiträge mit fast gleichen Phasenfaktoren addieren.
Beispiele
Masse im harmonischen Potential (konservativ)
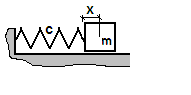
Eine Masse
sei über zwei Federn mit Federkonstante  und festen Randbedingungen verbunden. Grundvoraussetzung zur Beschreibung des
Problems im Lagrange-Formalismus ist das Aufstellen der Lagrange-Funktion, indem
man die Terme für kinetische Energie
und potentielle Energie
aufstellt:
und festen Randbedingungen verbunden. Grundvoraussetzung zur Beschreibung des
Problems im Lagrange-Formalismus ist das Aufstellen der Lagrange-Funktion, indem
man die Terme für kinetische Energie
und potentielle Energie
aufstellt:


Die Lagrange-Funktion lautet daher:

Die Lagrange-Funktion wiederum wird zur analytischen Beschreibung des
physikalischen Problems in die Euler-Lagrange-Gleichung eingesetzt, was dann auf
Gleichungen führt, die den Bewegungsgleichungen in der Newtonschen Mechanik
entsprechen. In diesem Beispiel lautet die generalisierte
Koordinate  ,
die Euler-Lagrange-Gleichung
,
die Euler-Lagrange-Gleichung
 .
.
Dies führt mit obigen Formeln für
auf

und damit auf die Bewegungsgleichung des Systems:
 .
.
Die allgemeine Lösung dieser Differentialgleichung
ist  ,
,
 ist die Zeit,
ist die Zeit,  die Kreisfrequenz. Die
konstante Amplitude
die Kreisfrequenz. Die
konstante Amplitude  und Phase
und Phase  können aus den Anfangsbedingungen bestimmt werden.
können aus den Anfangsbedingungen bestimmt werden.
Ladung im elektromagnetischen Feld (nicht-konservativ)
Eine Punktladung
mit Masse
bewege sich im elektromagnetischen Feld. Die generalisierten Koordinaten
entsprechen den kartesischen Koordinaten in 3 Raumdimensionen.
Die Felder (Magnetfeld  und elektrisches Feld
und elektrisches Feld  )
werden über das Skalarpotential
)
werden über das Skalarpotential  und das Vektorpotential
und das Vektorpotential  bestimmt:
bestimmt:

Die kinetische Energie des Teilchens ist klassisch:

Das „Potential“ ist hier allerdings geschwindigkeitsabhängig, man spricht deshalb wie oben dargestellt von einem generalisierten Potential:

Somit ist die Lagrange-Funktion eines geladenen Teilchens im elektromagnetischen Feld:

Die Euler-Lagrange-Gleichungen  führt auf die Bewegungsgleichung, auf deren rechter Seite die Lorentzkraft steht:
führt auf die Bewegungsgleichung, auf deren rechter Seite die Lorentzkraft steht:

Masse an Trommel (nicht-konservativ)
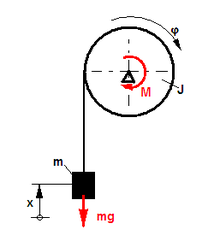
Die Achse einer Aufzugtrommel wird durch ein Drehmoment
 angetrieben. Die Masse
der Last beträgt ,
das Massenträgheitsmoment
der Trommel ist
angetrieben. Die Masse
der Last beträgt ,
das Massenträgheitsmoment
der Trommel ist  .
Der Radius der Trommel ist
.
Der Radius der Trommel ist  .
.
Zwischen den Koordinaten
und
besteht folgende Beziehung:



Die kinetische Energie ist:

Die virtuelle Arbeit der eingeprägten Kräfte ist


Daraus folgt schließlich die Bewegungsgleichung

Die Auflösung dieser Gleichung nach der Winkelbeschleunigung ergibt

Atwoodsche Fallmaschine (Methode erster Art)
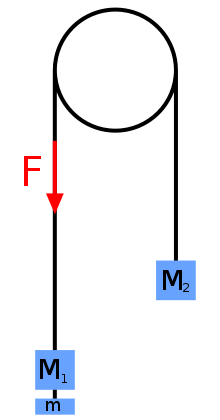
Bei der Atwoodschen Fallmaschine betrachtet man zwei Punktmassen im Gravitationsfeld der Erde, die über eine Rolle in der Höhe h aufgehängt und durch ein Seil der Länge l verbunden seien. Die Zwangsbedingung lautet in diesem Fall:

Wird das Seil berücksichtigt, das auf der Rolle (Rollenradius r) liegt, dann ergibt sich:

Die potentielle Energie V berechnet sich zu:

Für die Gradienten erhält man


Dies führt auf das System der Lagrange-Gleichungen 1. Art:

Dies kann man auflösen und erhält z.B. für bekannte Anfangsbedingungen:

Teilchen im freien Fall (allgemeine Relativitätstheorie)
In der allgemeinen
Relativitätstheorie durchlaufen frei fallende Teilchen Weltlinien längster Zeit:
zwischen zwei (genügend nah beieinander liegenden) Ereignissen
und  vergeht auf einer mitgeführten Uhr auf der Weltlinie frei fallender Teilchen
mehr Zeit,
als auf allen anderen Weltlinien durch diese Ereignisse. Sei
ein entlang des Pfades monoton wachsender Laufparameter, so ergibt sich die
verstrichene Zeit zu
vergeht auf einer mitgeführten Uhr auf der Weltlinie frei fallender Teilchen
mehr Zeit,
als auf allen anderen Weltlinien durch diese Ereignisse. Sei
ein entlang des Pfades monoton wachsender Laufparameter, so ergibt sich die
verstrichene Zeit zu

mit der Lagrange-Funktion

Dabei sind  die Komponentenfunktionen der Metrik
(sowohl Raum- als auch Zeitkomponenten). Wir rechnen einfachheitshalber in
Maßsystemen, in denen die Lichtgeschwindigkeit dimensionslos ist und den Wert
die Komponentenfunktionen der Metrik
(sowohl Raum- als auch Zeitkomponenten). Wir rechnen einfachheitshalber in
Maßsystemen, in denen die Lichtgeschwindigkeit dimensionslos ist und den Wert
 hat, und verwenden die Einsteinsche
Summenkonvention.
hat, und verwenden die Einsteinsche
Summenkonvention.
Der zu  konjugierte Impuls ist
konjugierte Impuls ist

und die Euler-Lagrange-Gleichungen lauten


Verwenden wir hier als Abkürzung das Christoffel-Symbol

so erweist sich die Weltlinie längster Dauer als Gerade: die Richtung der Tangente an die Weltlinie

ändert sich nicht bei Parallelverschiebung längs der Weltlinie

Die Parametrisierung wird nicht festgelegt. Verfügen wir so über sie, dass
der Tangentialvektor überall gleich lang ist, dann ist  konstant und der Tangentialvektor geht beim Durchlaufen der Weltlinie in sich
über. Sie erfüllt die Geodätengleichung
konstant und der Tangentialvektor geht beim Durchlaufen der Weltlinie in sich
über. Sie erfüllt die Geodätengleichung

Dies ist die allgemein-relativistische Form der Bewegungsgleichung eines frei
fallenden Teilchens. Die Gravitation ist in den  voll berücksichtigt.
voll berücksichtigt.
Literatur
Der Lagrange-Formalismus wird in vielen ein- und weiterführenden Lehrbüchern der klassischen Mechanik behandelt.
- Josef Honerkamp, Hartmann Römer: Klassische Theoretische Physik. 3. Auflage. Springer, 1993, ISBN 3-540-55901-9.
- Herbert Goldstein, Charles P. Poole, John L. Safko: Klassische Mechanik. 3. Auflage. Wiley-VCH, 2006, ISBN 3-527-40589-5.
Literatur zu Pfadintegralen.
- Hagen Kleinert: Pfadintegrale in Quantenmechanik, Statistik und Polymerphysik. Spektrum, Mannheim 1993, ISBN 3-86025-613-0.
Anmerkungen
- ↑
Die realen anholonomen Zwangsbedingungen wären
 Das Zeitdifferential
Das Zeitdifferential  verschwindet per definitionem bei den zugehörigen sog. virtuellen
Verschiebungen
verschwindet per definitionem bei den zugehörigen sog. virtuellen
Verschiebungen 
- ↑ Siehe Variationsrechnung. Dort ergeben sich die Euler-Lagrange-Gleichungen aus der Variation eines Funktionals. In der Mechanik ist das betrachtete Funktional die Wirkungsfunktion und man spricht von Lagrange-Gleichung.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 21.09. 2020