Kinetische Energie
Die kinetische Energie (von griechisch kinesis = Bewegung) oder auch Bewegungsenergie oder selten Geschwindigkeitsenergie ist die Energie, die ein Objekt aufgrund seiner Bewegung enthält. Sie entspricht der Arbeit, die aufgewendet werden muss, um das Objekt aus der Ruhe in die momentane Bewegung zu versetzen. Sie hängt von der Masse und der Geschwindigkeit des bewegten Körpers ab.
Als Formelzeichen
für die kinetische Energie wird häufig  oder
oder  verwendet. Die SI-Maßeinheit der
kinetischen Energie ist das Joule.
verwendet. Die SI-Maßeinheit der
kinetischen Energie ist das Joule.
Das Konzept der kinetischen Energie als eine Größe, die bei elastischen Stößen und vielen anderen mechanischen Vorgängen erhalten bleibt, wurde als vis viva („Lebendige Kraft“) von Gottfried Wilhelm Leibniz eingeführt, der darin in Streit mit den Anhängern von René Descartes die korrekte Erhaltungsgröße in der Mechanik sah (1686). Diese Größe war allerdings um den Faktor 2 größer als die heute gültige kinetische Energie. Der Faktor 1⁄2 in der Formel für die kinetische Energie findet sich schon 1726 bei Daniel Bernoulli Das eigentliche Energiekonzept bildete sich aber erst im 19. Jahrhundert heraus, insbesondere in der Schule der angewandten Mathematik in Frankreich und mit dem Aufkommen der Thermodynamik. In der Mechanik des 18. Jahrhunderts, deren Hauptuntersuchungsgegenstand die Himmelsmechanik war, spielte es noch keine große Rolle.
Kinetische Energie in der klassischen Mechanik
Massenpunkt
In der klassischen
Mechanik ist die kinetische Energie  eines Massenpunktes abhängig von seiner Masse
eines Massenpunktes abhängig von seiner Masse  und seiner Geschwindigkeit
und seiner Geschwindigkeit  :
:

Fährt beispielsweise ein Auto der Masse  mit einer Geschwindigkeit von
mit einer Geschwindigkeit von  ,
hat es demzufolge eine kinetische Energie von
,
hat es demzufolge eine kinetische Energie von  (das Joule,
(das Joule,
 ,
ist die SI-Einheit
der Energie).
,
ist die SI-Einheit
der Energie).
Wenn man den Bewegungszustand des Körpers nicht durch seine Geschwindigkeit
,
sondern durch seinen Impuls
 beschreibt, wie das u.a. in der Hamiltonschen
Mechanik üblich ist, so gilt für die kinetische Energie (wegen
beschreibt, wie das u.a. in der Hamiltonschen
Mechanik üblich ist, so gilt für die kinetische Energie (wegen  ):
):

Einfache Herleitung
Wird ein Körper der Masse
aus der Ruhe heraus auf die Geschwindigkeit
beschleunigt, so muss man dafür die Beschleunigungsarbeit
 zufügen. Bei konstanter Kraft gilt:
zufügen. Bei konstanter Kraft gilt:

Die Kraft erteilt dem Körper eine gleichmäßige
Beschleunigung  ,
nach der Grundgleichung
der Mechanik ist
,
nach der Grundgleichung
der Mechanik ist  .
Nach einer Zeit
.
Nach einer Zeit  ist die Geschwindigkeit
ist die Geschwindigkeit  ,
und es wurde der Weg
,
und es wurde der Weg  zurückgelegt. Alles oben eingesetzt, ergibt die Beschleunigungsarbeit
zurückgelegt. Alles oben eingesetzt, ergibt die Beschleunigungsarbeit
 .
.
Da die kinetische Energie in Ruhe den Wert Null hat, erreicht sie nach dem
Beschleunigungsvorgang genau diesen Wert .
Folglich gilt für einen Körper der Masse
mit der Geschwindigkeit :
Spezielle Koordinatensysteme
In speziellen Koordinatensystemen hat dieser Ausdruck die Form:
- Kartesische Koordinaten (x, y, z):

- Ebene Polarkoordinaten
(
 ):
):

- Kugelkoordinaten
(
 ):
):
![{\displaystyle E_{\mathrm {kin} }={\frac {1}{2}}m\left(r^{2}\left[{\dot {\vartheta }}^{2}+{\dot {\varphi }}^{2}\sin ^{2}\vartheta \right]+{\dot {r}}^{2}\right)}](/svg/147523b4fe56857363a761a057471a26678ba8f7.svg)
 ):
):
Dabei bedeutet der Punkt über der Koordinate ihre zeitliche Änderung, die Ableitung nach der Zeit.
Starre Körper
Die kinetische Energie eines starren
Körpers mit der Gesamtmasse  und der Geschwindigkeit
und der Geschwindigkeit  seines Schwerpunktes
ist die Summe der Energie aus der Bewegung des Schwerpunkts (Translationsenergie)
und der Rotationsenergie
aus der Drehung um den Schwerpunkt:
seines Schwerpunktes
ist die Summe der Energie aus der Bewegung des Schwerpunkts (Translationsenergie)
und der Rotationsenergie
aus der Drehung um den Schwerpunkt:

Hier ist  das Trägheitsmoment
des Körpers bezüglich seines Schwerpunktes und
das Trägheitsmoment
des Körpers bezüglich seines Schwerpunktes und  die Winkelgeschwindigkeit
der Drehung.
die Winkelgeschwindigkeit
der Drehung.
Mit dem Trägheitstensor
 wird dies allgemein geschrieben als:
wird dies allgemein geschrieben als:

Hydrodynamik
In der Hydrodynamik
wird oft statt der kinetischen Energie die kinetische Energiedichte
angegeben. Diese wird meistens durch ein kleines  oder
oder  ausgedrückt:
ausgedrückt:

Hierbei bezeichnet  die Dichte.
die Dichte.
Kinetische Energie in der relativistischen Mechanik
In der relativistischen
Physik gilt die oben angegebene Abhängigkeit der kinetischen Energie von der
Geschwindigkeit nur näherungsweise für Geschwindigkeiten deutlich kleiner als
die Lichtgeschwindigkeit.
Aus dem Ansatz, dass die kinetische Energie
die Differenz aus Gesamtenergie und Ruheenergie ist, folgt:

Dabei ist  die Lichtgeschwindigkeit,
die Masse und
die Lichtgeschwindigkeit,
die Masse und  der Lorentzfaktor
der Lorentzfaktor

Aus der Taylor-Entwicklung
nach  erhält man
erhält man
 ,
,
also für  wieder die Newtonsche kinetische Energie.
wieder die Newtonsche kinetische Energie.
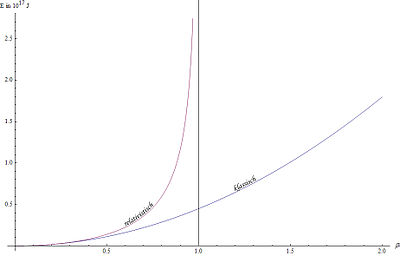
Da die Energie über alle Grenzen wachsen müsste, wenn die Geschwindigkeit
gegen die Lichtgeschwindigkeit geht,  ist es nicht möglich, einen massebehafteten Körper auf Lichtgeschwindigkeit zu
beschleunigen.
ist es nicht möglich, einen massebehafteten Körper auf Lichtgeschwindigkeit zu
beschleunigen.
Das Diagramm rechts zeigt für einen Körper mit der Masse von  die relativistische und die Newtonsche kinetische Energie als Funktion der
Geschwindigkeit (gemessen in Vielfachen der Lichtgeschwindigkeit).
die relativistische und die Newtonsche kinetische Energie als Funktion der
Geschwindigkeit (gemessen in Vielfachen der Lichtgeschwindigkeit).
Da die Geschwindigkeit eines bewegten Körpers vom Bezugssystem abhängt, gilt dies auch für dessen kinetische Energie. Das gilt in Newtonscher und in relativistischer Physik.
- Anwendungsbeispiele
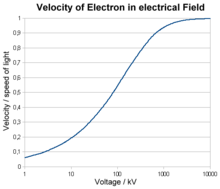
Im elektrischen Feld nimmt die Energie eines Elektrons der Ladung
und der Masse
linear mit der durchlaufenen Beschleunigungsspannung  zu. Die kinetische Energie ist nun die Differenz der relativistischen
Gesamtenergie
und der Ruheenergie 0.
Die kinetische Energie
zu. Die kinetische Energie ist nun die Differenz der relativistischen
Gesamtenergie
und der Ruheenergie 0.
Die kinetische Energie  ist also:
ist also:

Beachtet man, dass für die Gesamtenergie

gilt (:
relativistischer Impuls) und zwischen Impuls und Gesamtenergie der Zusammenhang

besteht, folgt für die Gesamtenergie aus  also:
also:

Berechnet man nun die Differenz aus  und
und  ,
setzt den Ausdruck gleich
,
setzt den Ausdruck gleich  und löst nach
auf, erhält man abschließend:
und löst nach
auf, erhält man abschließend:
 mit der Ruheenergie eines Elektrons
mit der Ruheenergie eines Elektrons 
Bei Beschleunigungsspannungen unterhalb 1 kV lässt sich die Geschwindigkeit aus dem klassischen Ansatz für die kinetische Energie abschätzen, bei höheren Energien muss relativistisch gerechnet werden. Bereits bei einer Spannung von 10 kV erreichen die Elektronen eine Geschwindigkeit von fast 20 % der Lichtgeschwindigkeit, bei 1 MV 94 %.
Der Large Hadron Collider führt Protonen eine kinetische Energie von 6,5 TeV zu. Diese Energie ist etwa 8 tausend Mal größer als die Ruheenergie eines Protons. Bei einer Kollision zwischen entgegengesetzt beschleunigten Protonen können Teilchen mit einer entsprechend hohen Ruheenergie entstehen.
Kinetische Energie in der Quantenmechanik
In der Quantenmechanik
ist der Erwartungswert
 der kinetischen Energie eines Teilchens der Masse ,
welches durch die Wellenfunktion
der kinetischen Energie eines Teilchens der Masse ,
welches durch die Wellenfunktion
 beschrieben wird, gegeben durch
beschrieben wird, gegeben durch
 ,
,
wobei  das Quadrat des Impulsoperators
des Teilchens ist.
das Quadrat des Impulsoperators
des Teilchens ist.
Im Formalismus der Dichtefunktionaltheorie
ist nur vorausgesetzt, dass die Elektronendichte bekannt ist, das heißt, dass
die Wellenfunktion formal nicht bekannt sein muss. Mit der Elektronendichte
 ist das exakte Funktional der kinetischen Energie für
ist das exakte Funktional der kinetischen Energie für  Elektronen unbekannt; falls jedoch im Fall
Elektronen unbekannt; falls jedoch im Fall  ein einzelnes Elektron betrachtet wird, so kann die kinetische Energie als
ein einzelnes Elektron betrachtet wird, so kann die kinetische Energie als
![{\displaystyle E_{\mathrm {kin} }[\rho ]=\int {\frac {1}{8}}{\frac {\nabla \rho (\mathbf {r} )\cdot \nabla \rho (\mathbf {r} )}{\rho (\mathbf {r} )}}\mathrm {d} ^{3}r}](/svg/dd15443c620a38a60d0be2a3af972d1c14fd8a16.svg)
geschrieben werden, wobei ![{\displaystyle E_{\mathrm {kin} }[\rho ]}](/svg/3688bd08b48cb85dcc750fd148178aeca0e0034d.svg) das Weizsäcker-Funktional
der kinetischen Energie ist.
das Weizsäcker-Funktional
der kinetischen Energie ist.
Siehe auch
Literatur
- Wolfgang Nolting: Klassische Mechanik. In: Grundkurs Theoretische Physik. Bd. 1, 8. Auflage. Springer, Berlin 2008, ISBN 978-3-540-34832-0.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 27.10. 2021