Skalarmultiplikation
Die Skalarmultiplikation, auch S-Multiplikation oder skalare Multiplikation genannt, ist eine äußere zweistellige Verknüpfung zwischen einem Skalar und einem Vektor, die in der Definition von Vektorräumen gefordert wird. Die Skalare sind dabei die Elemente des Körpers, über dem der Vektorraum definiert ist. Auch die analoge Verknüpfung bei Moduln wird Skalarmultiplikation genannt.
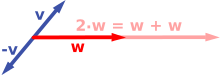
Das Ergebnis einer Skalarmultiplikation ist ein entsprechend skalierter Vektor. Im anschaulichen Fall euklidischer Vektorräume verlängert oder verkürzt die Skalarmultiplikation die Länge des Vektors um den angegebenen Faktor. Bei negativen Skalaren wird dabei zusätzlich die Richtung des Vektors umgekehrt. Eine spezielle Form einer solchen Skalierung ist die Normierung. Hierbei wird ein Vektor mit dem Kehrwert seiner Länge (allgemein seiner Norm) multipliziert, wodurch man einen Einheitsvektor mit Länge (oder Norm) eins erhält.
Definition
Ist  ein Vektorraum über dem Körper
ein Vektorraum über dem Körper
 ,
dann ist die Skalarmultiplikation eine zweistellige Verknüpfung
,
dann ist die Skalarmultiplikation eine zweistellige Verknüpfung
 ,
,
die per Definition des Vektorraumes gemischt assoziativ und distributiv ist, also
für alle Vektoren  und alle Skalare
und alle Skalare  folgende Eigenschaften erfüllt:
folgende Eigenschaften erfüllt:



Zudem gilt die Neutralität des Einselements  des Körpers:
des Körpers:
 .
.
Hierbei bezeichnet  die Vektoraddition
in
sowie
die Vektoraddition
in
sowie  und
und  jeweils die Addition und die Multiplikation im Körper
.
Häufig wird sowohl für die Vektoraddition, als auch für die Körperaddition das
Pluszeichen>
und sowohl für die Skalarmultiplikation, als auch für die Körpermultiplikation
das Malzeichen
verwendet. Dieser Konvention wird auch aufgrund der einfacheren Lesbarkeit im
weiteren Verlauf dieses Artikels gefolgt. Das Multiplikationssymbol wird oft
auch weggelassen und man schreibt kurz
jeweils die Addition und die Multiplikation im Körper
.
Häufig wird sowohl für die Vektoraddition, als auch für die Körperaddition das
Pluszeichen>
und sowohl für die Skalarmultiplikation, als auch für die Körpermultiplikation
das Malzeichen
verwendet. Dieser Konvention wird auch aufgrund der einfacheren Lesbarkeit im
weiteren Verlauf dieses Artikels gefolgt. Das Multiplikationssymbol wird oft
auch weggelassen und man schreibt kurz  statt
statt  und
und  statt
statt  .
.
Eigenschaften
Neutralität
Bezeichnet  das Nullelement
des Körpers und
das Nullelement
des Körpers und  den Nullvektor des Vektorraums,
dann gilt für alle Vektoren
den Nullvektor des Vektorraums,
dann gilt für alle Vektoren 
 ,
,
denn es gilt mit dem zweiten Distributivgesetz

und deswegen muss  der Nullvektor sein. Entsprechend gilt für alle Skalare
der Nullvektor sein. Entsprechend gilt für alle Skalare 
 ,
,
denn es gilt mit dem ersten Distributivgesetz

und daher muss auch hier  der Nullvektor sein. Insgesamt erhält man so
der Nullvektor sein. Insgesamt erhält man so
 ,
,
denn aus  folgt entweder
folgt entweder  oder
oder  und dann
und dann  ,
wobei
,
wobei  das multiplikativ inverse Element zu
das multiplikativ inverse Element zu  ist.
ist.
Inverse
Bezeichnet nun  das additiv inverse Element zum Einselement
und
das additiv inverse Element zum Einselement
und  den inversen Vektor zu
den inversen Vektor zu  ,
dann gilt
,
dann gilt
 ,
,
denn mit der Neutralität der Eins erhält man

und damit ist  der inverse Vektor zu .
Ist nun allgemein
der inverse Vektor zu .
Ist nun allgemein  das additiv inverse Element zu ,
dann gilt
das additiv inverse Element zu ,
dann gilt
 ,
,
denn mit  erhält man durch das gemischte Assoziativgesetz
erhält man durch das gemischte Assoziativgesetz

sowie mit der Kommutativität der Multiplikation zweier Skalare
 .
.
Beispiele
Koordinatenvektoren
Ist  der Koordinatenraum
und
der Koordinatenraum
und  ein Koordinatenvektor,
so wird die Multiplikation mit einem Skalar
komponentenweise wie folgt definiert:
ein Koordinatenvektor,
so wird die Multiplikation mit einem Skalar
komponentenweise wie folgt definiert:
 .
.
Bei der Skalarmultiplikation wird demnach jede Komponente des Vektors mit dem
Skalar multipliziert. Im dreidimensionalen euklidischen Raum  erhält man beispielsweise
erhält man beispielsweise
 .
.
Matrizen
Ist  der Matrizenraum und
der Matrizenraum und  eine Matrix,
so wird die Multiplikation mit einem Skalar
ebenfalls komponentenweise definiert:
eine Matrix,
so wird die Multiplikation mit einem Skalar
ebenfalls komponentenweise definiert:
 .
.
Bei der Skalarmultiplikation wird also wiederum jeder Eintrag der Matrix mit
dem Skalar multipliziert. Beispielsweise erhält man für eine reelle  -Matrix
-Matrix
 .
.
Polynome
Ist ![V=K[X]](/svg/560dd98c9cfbba5e3f0c71167913d77e75e730f1.svg) der Vektorraum der Polynome
in der Variablen
der Vektorraum der Polynome
in der Variablen  mit Koeffizienten aus einem Körper ,
so wird die Multiplikation eines Polynoms
mit Koeffizienten aus einem Körper ,
so wird die Multiplikation eines Polynoms ![P\in K[X]](/svg/eee48c7a5cc5b42c4287b4742c20f17c14e53813.svg) mit einem Skalar
wiederum komponentenweise definiert:
mit einem Skalar
wiederum komponentenweise definiert:
 .
.
Beispielsweise ergibt die Skalarmultiplikation der reellen Polynomfunktion  mit der Zahl
mit der Zahl  das Polynom
das Polynom
 .
.
Funktionen
Ist  ein linearer
Funktionenraum und
ein linearer
Funktionenraum und  eine Funktion
von einer nichtleeren Menge
eine Funktion
von einer nichtleeren Menge
 in einen Vektorraum
in einen Vektorraum  ,
dann wird das Ergebnis der Skalarmultiplikation einer solchen Funktion mit einem
Skalar
definiert als die Funktion
,
dann wird das Ergebnis der Skalarmultiplikation einer solchen Funktion mit einem
Skalar
definiert als die Funktion
 .
.
Betrachtet man beispielsweise den Vektorraum der linearen reellen Funktionen
der Form  ,
dann erhält man durch Skalarmultiplikation mit einer reellen Zahl
,
dann erhält man durch Skalarmultiplikation mit einer reellen Zahl  die Funktion
die Funktion
 .
.
Durch die Skalarmultiplikation wird demnach jeder Funktionswert um den Faktor
skaliert.
Literatur
- Gerd Fischer: Lineare Algebra. Vieweg+Teubner, 2009, ISBN 3-8348-0996-9.
- Jörg Liesen, Volker Mehrmann: Lineare Algebra. Springer, 2011, ISBN 3-8348-8290-9.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 16.03. 2021