Projektives Koordinatensystem
Ein projektives Koordinatensystem erlaubt es, die Lage eines Punktes in einem projektiven Raum eindeutig durch die Angabe eines Koordinatenvektors zu beschreiben. Dadurch können in den mathematischen Gebieten der Geometrie und der linearen Algebra die strukturerhaltenden Abbildungen von projektiven Räumen (das sind die Kollineationen und vor allem die projektiven Abbildungen) durch koordinatenbezogene Abbildungsmatrizen dargestellt und die Räume mit Methoden der analytischen Geometrie untersucht werden.
Die Komponenten des Koordinatenvektors, der einen Punkt im projektiven Raum beschreibt, heißen projektive Koordinaten. Sie werden auch als homogene Koordinaten bezeichnet. (→ im Hauptartikel „Homogene Koordinaten“ wird auch erläutert, wie projektive Koordinaten zur Kennzeichnung von Elementen verwandter Strukturen wie affiner Räume verwendet werden können.)
In einem abstrakten projektiven Raum endlicher Dimension
 ist das Koordinatensystem durch
ist das Koordinatensystem durch  geeignet gewählte Basispunkte bestimmt – die Punkte müssen in allgemeiner Lage
gewählt sein und werden dann als projektive
Basis bezeichnet. Der Bezug auf Basispunkte an Stelle einer Vektorraumbasis
(Hamelbasis), die im Standardmodell völlig ausreicht, ermöglicht eine
modellunabhängige geometrische Beschreibung des Bezugssystems und in der synthetischen
Geometrie die Einführung vergleichbarer Koordinaten auch in allgemeineren
Strukturen (insbesondere projektiven
Inzidenzebenen), denen kein Vektorraum
und damit kein Körper
als Koordinatenbereich zugeordnet werden kann.
geeignet gewählte Basispunkte bestimmt – die Punkte müssen in allgemeiner Lage
gewählt sein und werden dann als projektive
Basis bezeichnet. Der Bezug auf Basispunkte an Stelle einer Vektorraumbasis
(Hamelbasis), die im Standardmodell völlig ausreicht, ermöglicht eine
modellunabhängige geometrische Beschreibung des Bezugssystems und in der synthetischen
Geometrie die Einführung vergleichbarer Koordinaten auch in allgemeineren
Strukturen (insbesondere projektiven
Inzidenzebenen), denen kein Vektorraum
und damit kein Körper
als Koordinatenbereich zugeordnet werden kann.
Projektive Koordinaten im Standardmodell
Es sei  der -dimensionale
projektive
Raum über dem Körper
der -dimensionale
projektive
Raum über dem Körper
 .
.
Die projektiven Punkte, die zu einer Vektorraumbasis  des
des  gehören, also die von diesen Basisvektoren erzeugten eindimensionalen
Unterräume
gehören, also die von diesen Basisvektoren erzeugten eindimensionalen
Unterräume

bilden zusammen mit dem Einheitspunkt

eine projektive
Basis (auch: projektive Punktbasis)  des projektiven Raumes .
des projektiven Raumes .
Durch Schlitzen entlang der durch  verlaufenden projektiven Hyperebene erhält man einen affinen Raum
verlaufenden projektiven Hyperebene erhält man einen affinen Raum  .
In diesem sei
.
In diesem sei  der Nullpunkt. Wir betrachten für
der Nullpunkt. Wir betrachten für  den Schnittpunkt
den Schnittpunkt  der Geraden
der Geraden  mit der Hyperebene durch
mit der Hyperebene durch  .
Diese Punkte
.
Diese Punkte  bilden mit dem Nullpunkt
eine affine Basis von .
Mit dieser Basis können wir affine Koordinaten
bilden mit dem Nullpunkt
eine affine Basis von .
Mit dieser Basis können wir affine Koordinaten  in
definieren und die projektiven Koordinaten bezüglich der gewählten projektiven
Basis sind dann per Definition
in
definieren und die projektiven Koordinaten bezüglich der gewählten projektiven
Basis sind dann per Definition  .
.
Beispiel
Es wird der Raum  mit der Standardbasis
mit der Standardbasis
![B_{0}=\left[1:0:0\right],B_{1}=\left[0:1:0\right],B_{2}=\left[0:0:1\right],B_{3}=\left[1:1:1\right]](/svg/2687b3e98a04566acda73b7ba9753f947adabcbe.svg)
betrachtet. Dann haben die projektiven Geraden
![B_{3}B_{1}=\left\{\left[1:1+s:1\right]\mid s\in K\right\}\cup \left\{B_{1}\right\}](/svg/a7bbf55612d3451ce38b4b2ad65a6900a1c5ee28.svg) und
und ![B_{0}B_{2}=\left\{\left[t:0:1-t\right]\mid t\in K\right\}](/svg/7ffa9420a741cdb6bd697608bad510420c7c93df.svg)
den Schnittpunkt ![E_{1}=\left[1:0:1\right]](/svg/5261c937f4a99074a630fa97d0afb21b15437092.svg) und die projektiven Geraden
und die projektiven Geraden
![B_{3}B_{2}=\left\{\left[1:1:1+s\right]\mid s\in K\right\}\cup \left\{B_{2}\right\}](/svg/27d4bf414e8d3c0922730d4035f09120bae97198.svg) und
und ![B_{0}B_{1}=\left\{\left[t:1-t:0\right]\mid t\in K\right\}](/svg/5146207024044a2f646415a939509c0f13130a19.svg)
den Schnittpunkt ![E_{2}=\left[1:1:0\right]](/svg/4052c443972b81a09121e3036c6e746b820e6a9b.svg) .
Die projektiven Koordinaten des Punktes
.
Die projektiven Koordinaten des Punktes ![\left[x:y:z\right]](/svg/88e82dc40a3493338ecd18596ee1dea3577d5dd2.svg) sind dann
sind dann  für
für  .
.
Projektive Koordinaten in der synthetischen Geometrie
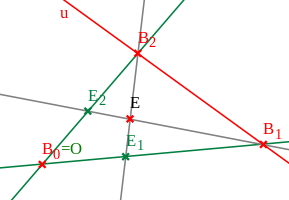
 (rot) bestimmt eine eindeutige affine Punktbasis
(rot) bestimmt eine eindeutige affine Punktbasis  (grün), wobei die Verbindungsgerade
(grün), wobei die Verbindungsgerade  zur Ferngeraden wird.
zur Ferngeraden wird.In einer beliebigen, auch nichtdesargueschen projektiven Ebene können projektive Koordinaten nach Wahl einer projektiven Basis mit Hilfe affiner Koordinaten eingeführt werden.
In der projektiven Ebene muss zunächst eine rojektive
Basis
gewählt worden sein, das heißt, keine drei der vier Punkte sollen auf einer
gemeinsamen Geraden liegen. Der Punkt  wird zum Ursprung
wird zum Ursprung  des affinen Koordinatensystems, die Verbindungsgerade
des affinen Koordinatensystems, die Verbindungsgerade
 zu seiner ersten,
zu seiner ersten,  zu seiner zweiten Koordinatenachse. Die zunächst noch projektiven Schnittpunkte
zu seiner zweiten Koordinatenachse. Die zunächst noch projektiven Schnittpunkte
 und
und  sind die Einheitspunkte auf diesen Achsen, somit ist
sind die Einheitspunkte auf diesen Achsen, somit ist  eine affine Punktbasis der affinen Ebene, die aus der projektiven durch
Schlitzen längs der Gerade
entsteht. Diese Gerade wird zur Ferngerade
der affinen Ebene, siehe dazu auch die Abbildung rechts.
eine affine Punktbasis der affinen Ebene, die aus der projektiven durch
Schlitzen längs der Gerade
entsteht. Diese Gerade wird zur Ferngerade
der affinen Ebene, siehe dazu auch die Abbildung rechts.
- Für jeden Punkt der geschlitzten Ebene können durch Koordinatenkonstruktion affine Koordinaten
 bestimmt werden, wobei der Koordinatenbereich
durch die erste Achse des affinen Koordinatensystems repräsentiert wird. → Die
Koordinatenkonstruktion ist im Artikel Ternärkörper
beschrieben.
bestimmt werden, wobei der Koordinatenbereich
durch die erste Achse des affinen Koordinatensystems repräsentiert wird. → Die
Koordinatenkonstruktion ist im Artikel Ternärkörper
beschrieben. - Ein Punkt außerhalb von
 mit den affinen Koordinaten
mit den affinen Koordinaten  erhält die projektiven Koordinaten
erhält die projektiven Koordinaten  .
. - Ein Punkt
 auf der Ferngeraden
erhält die projektiven Koordinaten
auf der Ferngeraden
erhält die projektiven Koordinaten  ,
wobei
die affinen Koordinaten des Punktes
auf der Verbindungsgerade
,
wobei
die affinen Koordinaten des Punktes
auf der Verbindungsgerade  sind. (Aus der vorausgesetzten "allgemeinen Lage" folgt
sind. (Aus der vorausgesetzten "allgemeinen Lage" folgt  und mithin
und mithin  .)
.)
Die so bestimmten Koordinaten sind für Punkte außerhalb von
eindeutig, für Punkte auf
kann diese Eindeutigkeit durch zusätzliche Vereinbarungen erreicht werden. Sie
sind im Allgemeinen nicht homogen: Im Koordinatenbereich ,
der ein Ternärkörper ist, lässt sich im Allgemeinen keine „Skalarmultiplikation“
definieren.
Anwendungen
Abbildungen
Wenn  und
und  projektive Räume der Dimension
bzw.
projektive Räume der Dimension
bzw.  über einem festen Körper
sind, dann gilt:
über einem festen Körper
sind, dann gilt:
- Jede projektive
Abbildung
 von
nach
besitzt bezüglich fest gewählter projektiver Punktbasen in
und
eine Darstellung
von
nach
besitzt bezüglich fest gewählter projektiver Punktbasen in
und
eine Darstellung ![\pi :\left[x_{0},\ldots ,x_{n}\right]^{T}\rightarrow \left[(A\cdot (x_{0},\ldots ,x_{n})^{T})\right]^{T}](/svg/fb5f759cb365e1c515d153e7e56d8f7d46f73333.svg) .
Die Abbildungsmatrix
.
Die Abbildungsmatrix  hat
hat  Zeilen und
Zeilen und  Spalten und ist bis auf einen skalaren Faktor
Spalten und ist bis auf einen skalaren Faktor  eindeutig bestimmt.
eindeutig bestimmt. - Wählt man zu jedem Punkt
 einer projektiven Punktbasis von
oder gleichwertig zu
Punkten in allgemeiner Lage, jeweils einen beliebigen Bildpunkt
einer projektiven Punktbasis von
oder gleichwertig zu
Punkten in allgemeiner Lage, jeweils einen beliebigen Bildpunkt  ,
dann lässt sich dies eindeutig zu einer projektiven Abbildung
,
dann lässt sich dies eindeutig zu einer projektiven Abbildung
 fortsetzen, bei der also
fortsetzen, bei der also  für jeden Basispunkt gilt.
für jeden Basispunkt gilt. - Jede Projektivität
auf
besitzt bezüglich einer fest gewählten projektiven Punktbasis in
eine Darstellung .
Die quadratische, reguläre
 Abbildungsmatrix
ist bis auf einen skalaren Faktor
eindeutig bestimmt.
Abbildungsmatrix
ist bis auf einen skalaren Faktor
eindeutig bestimmt. - Zu
Urbildpunkten
in allgemeiner Lage und
Bildpunkten
 in allgemeiner Lage gibt es genau eine Projektivität
auf ,
bei der
in allgemeiner Lage gibt es genau eine Projektivität
auf ,
bei der  ist. Man sagt daher auch, die projektive
lineare Gruppe
ist. Man sagt daher auch, die projektive
lineare Gruppe  operiert
scharf einfach transitiv auf der Menge der -Tupel
von Punkten in allgemeiner Lage.
operiert
scharf einfach transitiv auf der Menge der -Tupel
von Punkten in allgemeiner Lage. - Ist die Dimension
 ,
dann lässt sich jede Kollineation
,
dann lässt sich jede Kollineation
 auf
bezüglich einer fest gewählten projektiven Basis in
als Komposition
auf
bezüglich einer fest gewählten projektiven Basis in
als Komposition
 mit einer Projektivität
und einem Automorphismus
mit einer Projektivität
und einem Automorphismus  des Körpers
darstellen.
des Körpers
darstellen.
Doppelverhältnis
Das Doppelverhältnis
von vier kollinearen Punkten  in einem projektiven Raum ist das einfache Verhältnis der projektiven
Koordinaten, die der Punkt
hat, wenn die übrigen drei Punkte als Punktbasis der gemeinsamen Geraden gewählt
werden. Dabei sind
in einem projektiven Raum ist das einfache Verhältnis der projektiven
Koordinaten, die der Punkt
hat, wenn die übrigen drei Punkte als Punktbasis der gemeinsamen Geraden gewählt
werden. Dabei sind  die Basispunkte und
die Basispunkte und  der Einheitspunkt des Koordinatensystems. Hat nun
bezüglich dieses Systems die Koordinatendarstellung
der Einheitspunkt des Koordinatensystems. Hat nun
bezüglich dieses Systems die Koordinatendarstellung ![P=\left[p_{0};p_{1}\right]](/svg/1cef2838276dd2d75b6fb6a2627fcf3b1055365d.svg) ,
dann gilt für das Doppelverhältnis:
,
dann gilt für das Doppelverhältnis:  .
Dieser Zusammenhang ist einer der Gründe dafür, dass das Doppelverhältnis
.
Dieser Zusammenhang ist einer der Gründe dafür, dass das Doppelverhältnis
 auch gelegentlich als inhomogene projektive Koordinate von
(bezüglich der anderen Punkte im Doppelverhältnis) bezeichnet wird.
auch gelegentlich als inhomogene projektive Koordinate von
(bezüglich der anderen Punkte im Doppelverhältnis) bezeichnet wird.
Parametergleichungen
- Die Verbindungsgerade von zwei verschiedenen Punkten
![A=\left[a_{0};a_{1};\ldots a_{n}\right]](/svg/50e1edbf5cf7642ff92346abd43e017cef0c0491.svg) und
und ![B=\left[b_{0};b_{1};\ldots b_{n}\right]](/svg/2e5837442689895cdcc5fbeb297f8caec5028bc9.svg) hat die homogene Parameterdarstellung
hat die homogene Parameterdarstellung

Dabei sind dann  für
für  die projektiven Koordinaten eines Geradenpunktes
die projektiven Koordinaten eines Geradenpunktes ![X=\left[{\vec {x}}^{{\,T}}\right]](/svg/01d18863a3f86c10d03b1b83751db507fd84c8da.svg)
- Allgemeiner ist der Verbindungsraum von
 Punkten
Punkten ![A_{j}=\left[{{\vec {a}}_{j}}^{{T}}\right];\;1\leq j\leq k](/svg/38a36308e5284b6d99d6900cc7d222a2787a468a.svg) ,
deren Koordinatenvektoren linear unabhängig sind, ein
,
deren Koordinatenvektoren linear unabhängig sind, ein  -dimensionaler
Unterraum des projektiven Raumes mit der Parameterdarstellung
-dimensionaler
Unterraum des projektiven Raumes mit der Parameterdarstellung

Koordinatengleichungen und Hyperebenenkoordinaten
Nach der Wahl einer projektiven Punktbasis  in einem -dimensionalen
projektiven Raum
in einem -dimensionalen
projektiven Raum  kann man jedem Punkt
kann man jedem Punkt ![P=\left[p_{0};p_{1};\ldots p_{n}\right]](/svg/61e920afdbaf743eaca0dab7642f2708b5ec49c4.svg) eindeutig die Koordinatengleichung
eindeutig die Koordinatengleichung  zuordnen, deren Lösungsmenge, als Punktkoordinaten aufgefasst, einen
zuordnen, deren Lösungsmenge, als Punktkoordinaten aufgefasst, einen  -dimensionalen
Unterraum von ,
also eine Hyperebene beschreibt. Da
die Gleichung homogen ist, ändert sich ihre Lösungsmenge nicht, wenn man jede
Koordinate mit dem gleichen Skalar
-dimensionalen
Unterraum von ,
also eine Hyperebene beschreibt. Da
die Gleichung homogen ist, ändert sich ihre Lösungsmenge nicht, wenn man jede
Koordinate mit dem gleichen Skalar  multipliziert, die Hyperebene hängt also nur vom Punkt
und dem gewählten projektiven Koordinatensystem ab. Man bezeichnet den
Koordinatenvektor
multipliziert, die Hyperebene hängt also nur vom Punkt
und dem gewählten projektiven Koordinatensystem ab. Man bezeichnet den
Koordinatenvektor ![P^{D}=\left[p_{0};p_{1};\ldots p_{n}\right]^{D}](/svg/8697c245eafcf2655eb9ba7a6a701a773acad1e3.svg) als Hyperebenenkoordinaten dieser Hyperebene. Jedem Punkt des Raumes wird
so durch Dualisierung
als Hyperebenenkoordinaten dieser Hyperebene. Jedem Punkt des Raumes wird
so durch Dualisierung
 eineindeutig eine Hyperebene zugeordnet.
eineindeutig eine Hyperebene zugeordnet.
Dualität in projektiven Räumen
Die duale Zuordnung von Punkten zu Hyperebenen kann zu einer Dualität im Verband der projektiven Teilräume eines Projektiven Raumes ausgebaut werden. Dabei gelten folgende Zuordnungen:
| Begriff | Dualer Begriff |
|---|---|
| Punkt | Hyperebene |
| Gesamtraum | Leere
Menge als  -dimensionaler
Teilraum -dimensionaler
Teilraum |
| -dimensionaler
Teilraum |
 -dimensionaler
Teilraum -dimensionaler
Teilraum |
Schnitt  von zwei Teilräumen
von zwei Teilräumen |
Verbindungsraum  von zwei Teilräumen
von zwei Teilräumen |
| Doppelverhältnis von vier kollinearen Punkten | Doppelverhältnis von vier Hyperebenen, die sich in einem  -dimensionalen
Teilraum schneiden -dimensionalen
Teilraum schneiden |
Die Zuordnung ist auch umgekehrt zu verstehen, da die Dualisierung involutorisch ist: Einer Hyperebene entspricht dual ein Punkt. Während die konkrete Dualisierung vom gewählten Koordinatensystem abhängt, sind allgemeine Sätze davon nicht betroffen.
Das Dualitätsprinzip der projektiven Geometrie beruht auf dem
algebraischen Dualraum des endlichdimensionalen Koordinatenvektorraums
,
siehe dazu den Hauptartikel „Dualraum“.
Anwendungsbeispiele in der ebenen Geometrie finden sich in „Dualität
(Mathematik)“ im Abschnitt „Dualitätsprinzip
der projektiven Geometrie und in Inzidenzstrukturen“.
Dreidimensionale Beispiele
In einem dreidimensionalen Raum  ist die Menge der Geraden (eine Gerade entspricht einem 2-dimensionalen
Unterraum von
ist die Menge der Geraden (eine Gerade entspricht einem 2-dimensionalen
Unterraum von  )
zu sich selbst dual. Die konkrete Gerade
)
zu sich selbst dual. Die konkrete Gerade
![g=\langle e_{0},e_{1}\rangle =\lbrace \left[r,s,0,0\right]:\;(r,s)\in K^{2}\setminus \lbrace 0\rbrace \rbrace](/svg/19febc08238bac901042cb1632926450d328df2e.svg)
ist dual zu
![g^{D}=\lbrace \left[x_{0},x_{1},x_{2},x_{3}\right]:(x_{0},x_{1},x_{2},x_{3})\in K^{4}\setminus \lbrace 0\rbrace ,x_{0}=x_{1}=0\rbrace =\langle e_{2},e_{3}\rangle](/svg/10666ddeecb4d87e8e553088de0bafd4bd2ec08f.svg)
Dies ist eine zu  windschiefe Gerade! Die Aussage „Die Geraden
und
windschiefe Gerade! Die Aussage „Die Geraden
und  schneiden einander nicht.“ ist dual zu „Der Verbindungsraum von
und
ist der gesamte dreidimensionale Raum.“ Für zwei beliebige windschiefe Geraden
und
schneiden einander nicht.“ ist dual zu „Der Verbindungsraum von
und
ist der gesamte dreidimensionale Raum.“ Für zwei beliebige windschiefe Geraden
und  kann stets eine Punktbasis gewählt werden, bezüglich der
kann stets eine Punktbasis gewählt werden, bezüglich der  gilt – man wählt zu jeder Geraden zwei linear unabhängige, erzeugende Vektoren
und ergänzt diese vier Vektoren durch ihre Summe als Einheitspunkt. Also sind
die Aussagen „Zwei Geraden schneiden einander nicht“ und „Zwei Geraden spannen
den Raum auf“ zueinander duale Beschreibungen der Eigenschaft „windschief“.
gilt – man wählt zu jeder Geraden zwei linear unabhängige, erzeugende Vektoren
und ergänzt diese vier Vektoren durch ihre Summe als Einheitspunkt. Also sind
die Aussagen „Zwei Geraden schneiden einander nicht“ und „Zwei Geraden spannen
den Raum auf“ zueinander duale Beschreibungen der Eigenschaft „windschief“.
Dagegen sind die Aussagen „
und
schneiden sich in einem Punkt“ und „
und
spannen eine Ebene auf“ äquivalent aber nicht dual zueinander, da die erste
Aussage nicht für beliebige Paare von Geraden gilt und die dazu duale Aussage
von anderen Geraden handelt!


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 11.02. 2020