Digitale Messtechnik
Die Messtechnik kann nach verschiedenen Gesichtspunkten gegliedert werden. Eine Möglichkeit besteht in der Unterscheidung nach analoger oder digitaler Messtechnik. Spezifische Teilgebiete der digitalen Messtechnik sind ihre Messmethode, die Informationsdarstellung und die Gerätetechnik.
Grundlagen – Definitionen – Vergleiche
Messmethoden
Die Messung ist das Ausführen von geplanten Tätigkeiten zum quantitativen Vergleich der Messgröße mit einer Einheit (DIN 1319-1, Nr. 2.1). Was es ausmacht, wenn dieses Messen ein digitales ist, soll durch den Vergleich mit dem analogen Messen beschrieben werden.
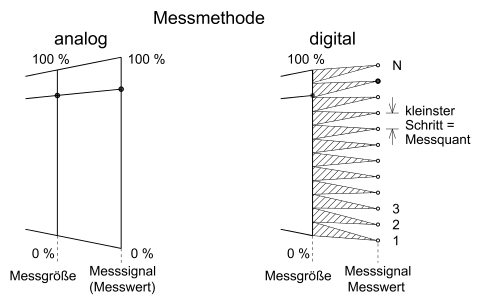
Analoge Messmethode
Sprachliche Grundlage: analog = entsprechend.
Der Messwert wird durch ein
Analogon dargestellt, einen ähnlichen oder entsprechenden (analogen)
Sachverhalt, hier durch eine Zwischengröße, deren Wert leicht als Zahl ablesbar
ist. ¹)
Beispiel: Drehspul-Strommessgerät: Der Strom bewirkt die Verschiebung einer Marke auf einer Skale. Abgelesen wird die Länge oder der Winkel, welche kontinuierlich dem Strom zugeordnet sind.
Jedes Messgerät hat eine Messgeräteabweichung als Folge der Unvollkommenheit der Konstruktion, Fertigung und Justierung, beschreibbar durch
- Garantiefehlergrenzen (Ein geringerer Wert ist möglich durch Korrektur mit einer Kurve der Messabweichungen, die aus dem Unterschied zu besseren Geräten oder einem anderen Vergleichsmaßstab bestimmt worden sind),
- Messunsicherheit (Ein geringerer Wert ist möglich durch feinere Skalenteilung, größere experimentelle Erfahrung sowie wiederholtes Messen).
Sieht man, um das Wesentliche zu erkennen, von diesen Abweichungen ab, so erkennt man als Merkmale:
- Das Ausgangssignal (Strecke oder Winkel) ist beliebig fein auflösbar.
- Es ist ein eindeutig umkehrbares Maß für das Eingangssignal.
Weitere Beispiele analoger Messmethoden:
- Temperatur: Ausdehnung der thermometrischen Flüssigkeit
- Druck: Verformung einer Membran
- Drehzahl: Spannung eines Tachogenerators
Das Messgerät verschafft das Analogon, der Beobachter bestimmt daraus den Zahlenwert und zusammen mit der Einheit den Messwert.
¹) Dieser Satz ist nur als anschaulicher Einstieg zu verstehen.
Digitale Messmethode
Sprachliche Grundlage: digit(us) = Finger, Ziffer. ²)
Der Messwert wird
direkt in Ziffernform dargestellt. ¹)
- Beispiel Drehzahlmesser
Ein Gerät, das
- pro Umdrehung ein Zählwerk um eine Eins weiterstellt und
- die Zählung genau eine Minute lang zulässt.
Der Zählerstand liefert direkt den Messwert zur Einheit Umdrehung pro
Minute.
Anmerkung: Der besondere Name Umdrehung wird als Einheit bei der
Spezifikation für drehende Maschinen weitverbreitet verwendet statt der Eins.
Entsprechend sind bei der Drehzahl
die Einheiten Umdrehung durch Sekunde oder Umdrehung durch Minute
weitverbreitet.
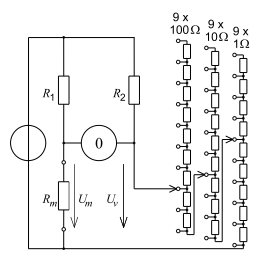
- Beispiel Wheatstone-Brücke
Einstellung der Widerstands-Dekaden bis zum „Nullabgleich“, genauer gesagt bis
 .
.
Dabei ist  der kleinste an
der kleinste an  einstellbare Spannungsschritt. Wenn
einstellbare Spannungsschritt. Wenn  ist, dann ist nach dem Abgleich der zu messende Widerstand
ist, dann ist nach dem Abgleich der zu messende Widerstand  gleich dem an den Dekaden-Schaltern eingestellten Widerstand. Im Bild wird
abgelesen:
gleich dem an den Dekaden-Schaltern eingestellten Widerstand. Im Bild wird
abgelesen:
-
= ganze Zahl mal kleinste Schrittweite = 235 × 1 Ω.
Auch hier sind Messgeräteabweichungen zu beachten,
- Garantiefehlergrenzen durch die Fehlergrenzen des eingebauten
Vergleichsmaßstabes,
- im Beispiel Zähler: des Zeitmaßstabes,
- im Beispiel Brücke: der verwendeten Widerstände,
- Messunsicherheit durch einen Ziffernschritt auf der niederwertigsten Stelle. Diese Quantisierungs- oder Digitalisierungsabweichung kann als relative Abweichung immer dann unbedeutend klein gemacht werden, wenn es gelingt, mit großen Zahlen zu arbeiten, siehe nachfolgend „Zur Quantisierungsabweichung“.
Sieht man, um das Wesentliche zu erkennen, von diesen Abweichungen ab, so erkennt man als Merkmale:
- Das Ausgangssignal ist in abzählbar viele Schritte unterteilbar.
- Es ist eine in sich eindeutige Aussage.
Die Messgröße kann beliebig feinen Änderungen unterliegen, durch das Messgerät wird ihr Messwert quantisiert,
- im Beispiel Zähler: der Wert der Drehzahl durch den Impulsgeber,
- im Beispiel Brücke: der Wert des Widerstandes
durch die schrittweise Einstellung des Vergleichswiderstandes.
¹) Dieser Satz ist nur als anschaulicher Einstieg zu verstehen.
²) Der Begriff Digit wird in der Literatur nicht einheitlich verwendet, oft im Sinne von Ziffernschritt, gelegentlich im Sinne von Stelle.
Zur Quantisierungsabweichung
Es gelingt, zu einer großen Zahl des Messwertes und damit zu einer kleinen relativen Quantisierungsabweichung zu kommen,
- im Beispiel Zähler, wenn man mehrere Impulsgeber verwendet, z.B.100 Impulse pro Umdrehung,
- im Beispiel Brücke, wenn man den einstellbaren Vergleichs-Widerstand feiner unterteilt, z.B. noch Widerstandsdekaden mit Schrittweiten 0,1 Ω und 0,01 Ω hinzufügt.
Damit erreicht man eine höhere Ablesegenauigkeit, in den beiden Beispielen
durch 2 zusätzliche Stellen.
Bei 5 Dezimalstellen ist die relative
Quantisierungsabweichung = 1/10000 … 1/99999 =
10−4 … 10−5. Ob die Gesamtgenauigkeit damit
größer geworden ist, ist zumindest fraglich. Durch die Eindeutigkeit der
Ablesung wird allzu leicht vergessen, die übrigen Quellen für Messabweichungen
zu beachten. Wenn in der Brücke jeder Widerstand die relative Fehlergrenze von
10−3 hat, dann ist auch die relative Fehlergrenze des Ergebnisses
nicht kleiner, und die Angabe von 5 Stellen wäre nicht vertretbar. Außerdem
müsste beim Messaufbau an die Vermeidung systematischer
Abweichungen (Klemmenwiderstände,
Thermospannungen)
besonders sorgfältig gedacht werden.
Definitionen
| Definition der analogen Messmethode aus DIN
1319-2:
Messmethode, bei welcher der Messwert durch stufenlose Verarbeitung des Messsignals ermittelt wird. |
Definition der digitalen Messmethode aus
DIN
1319-2:
Messmethode, bei welcher der Messwert durch stufenweise Verarbeitung des Messsignals ermittelt wird. |
| Das entscheidende Kennzeichen:
Das Messsignal ist zumindest im Idealfall eine eindeutig umkehrbare Abbildung der Messgröße. (Gegensatz: Bei der digitalen Messmethode ist ein Rückschluss innerhalb der Breite eines Ziffernschrittes ungewiss.) |
Das entscheidende Kennzeichen:
Das Messsignal ist eine in fest gegebenen Schritten quantisierte Abbildung der Messgröße. (Gegensatz: Bei der analogen Messmethode kann sich das Messsignal beliebig fein einstellen.) |
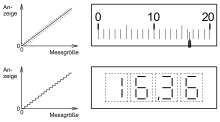
Anzeige der Messwerte
Skalenanzeige, Ziffernanzeige

Bei analog arbeitenden Messgeräten wird die Skalenanzeige
bevorzugt.
Bei digital arbeitenden Messgeräten wird die Ziffernanzeige
bevorzugt.
Aber eine Fehldeutung wäre:
- Skalenanzeige bedeutet analoge Messmethode.
- Gegenbeispiel: Zeitmessung; Bahnhofsuhren, die Skalen verwenden, wobei sich der Minutenzeiger schrittweise weiterdreht.
- Ziffernanzeige bedeutet digitale Messmethode.
- Gegenbeispiel: Energiemessung; elektromechanische Energiezähler, die Ziffernrollen verwenden, wobei sich die Rolle für die letzte Stelle kontinuierlich weiterdreht und mit einer Skale für noch weitergehende Auflösung versehen ist.
Bandanzeige, Balkenanzeige
Die Bandanzeige enthält eine Reihe von Segmenten (typisch 5 … 200 Segmente), von denen bei steigender Messgröße eine steigende Anzahl eingeschaltet wird. Sie arbeitet digital und verbindet die Digitaltechnik mit den Vorteilen einer Skalenanzeige. Mit ≥ 100 Segmenten fällt die Stufung kaum mehr auf, und man spricht von quasianalog. Die Balkenanzeige auf einem Bildschirm entspricht auch einer Skalenanzeige, wobei sich die Länge des Balkens mit der Zahl der Bildpunkte so fein stufen lässt, dass sich subjektiv die Grenze zur kontinuierlichen Einstellung vollends verwischen kann.
Vorteile und Grenzen der Anzeiger
| Skalenanzeige | Ziffernanzeige |
|---|---|
| Anzeige | |
| Bei analoger Messmethode ist die Anzeige in ihren Feinheiten nur schätzbar. | Bei digitaler Messmethode ist die Anzeige eindeutig ablesbar. |
| Die Auflösung ist begrenzt | |
durch die Ablesbarkeit auf 1/2 … 1/10 Skalenteilungswert 1 … 0,1 % vom Endwert.
1 … 0,1 % vom Endwert. |
durch die Stufung auf 1 Ziffernschritt
(Digit) ≤0,1 % vom Endwert bei mindestens dreistelliger Anzeige. |
| Visuelle Betriebsüberwachung | |
| ist auf einen Blick möglich. | erfordert bewusstes Lesen und Bewerten der Zahl. |
| Bei rascher Schwankung der Messgröße | |
| (rasch im Verhältnis zur Einstell- oder Erfassungszeit) | |
| ist eine mittlere Größe ablesbar. | ist der Anzeiger ungeeignet. |
| Trendbeobachtung oder Störerkennung | |
| ist anhand Kurvenzug (mittels Schreiber oder Bildschirm) anschaulich leicht möglich. | ist anhand Zahlenkolonnen (mittels Drucker oder Bildschirm) mühsam. |
Kodierung
Kodierung ist die Darstellung einer Nachricht in einer willkürlich gewählten Form. Je nach den Umständen sind verschiedene Kodierungen zweckmäßig.
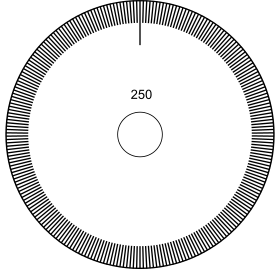
Zählkode
Darstellung durch eine Folge von gleichwertigen Zeichen (Impulsen); bei jedem
Impuls ist um einen Ziffernschritt weiterzuzählen.
Bei nicht elektrischen
Messgrößen kann man Impulse durch optische Abtastung (z.B. an
Strichscheibe) oder induktive Abtastung (z.B. an Zahnrad) erzeugen.
Gesamtzahl
Die Anzahl
 der Impulse repräsentiert die zu kodierende Zahl selber.
der Impulse repräsentiert die zu kodierende Zahl selber.
Beispiele:
- Strichliste
- Anzahl der Umdrehungen einer Welle oder, bei vielen Impulsen pro Umdrehung, ihre Positionierung.
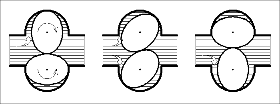
- Volumenmessung mit Ovalradzähler oder Turbinenradzähler.
Zeitlich befristete Zählung
Die Zahl  der Impulse in einer Zeitspanne
der Impulse in einer Zeitspanne  repräsentiert die zu kodierende Zahl
repräsentiert die zu kodierende Zahl  .
.

mit  = Zuordnungsfaktor, z.B. Zahl der Impulse pro Umdrehung, wenn
für die Drehzahl steht.
= Zuordnungsfaktor, z.B. Zahl der Impulse pro Umdrehung, wenn
für die Drehzahl steht.
Beispiele:
- Häufigkeits- bzw. Frequenzmessung
- Drehzahlmessung
- Durchflussmessung
Ein Frequenzsignal besitzt mit seiner Zählbarkeit wesentliche Vorteile eines Digitalsignals, obwohl die Frequenz wegen ihrer stetigen Veränderbarkeit eindeutig ein Analogsignal ist.
Ist die zu messende Größe als frequenz-proportionale Größe durch Zählung zu bestimmen, so muss die Dauer der Zählung begrenzt sein.
Die Zählung eignet sich für verschiedene Messaufgaben:
- am Beispiel des Ovalradzählers:
-
- Volumen-Messung für den Verkauf (Abgabemenge),
- Durchfluss-Messung für den Betrieb (Förderleistung oder Strömungsgeschwindigkeit).
- Je nach Aufgabe muss während der (im Ergebnis unwichtigen) Gesamtdauer der Verladung gezählt werden oder befristet nach Zeittakt.
- am Beispiel von Induktionsschleifen in der Fahrbahn zum Fußballstadion:
- Unbefristete Zählung für die Auslastung des Parkplatzes,
- Befristete Zählung für die Leistungsfähigkeit der Straße.
Positionskode
Darstellung durch eine Folge von Zeichen, die je nach Position in einem Verbund unterschiedlich zu werten sind.
Dezimale Darstellung
Jede Ziffer hat die Stellenwertigkeit oder den Gewichtsfaktor einer Zehnerpotenz.
Beispiel: Dezimalzahl 145 = 5⋅100 + 4⋅101 + 1⋅102
Die Unterdarstellung der Dezimalziffern ist
- mechanisch kein Problem, zum Beispiel bei
- Dekadenwiderständen,
- Ziffernrollen,
- elektronisch schwierig.
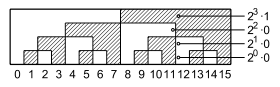
Binäre oder duale Darstellung
Im einfachsten Fall, der auch häufig vorkommt, hat jede Ziffer die Stellenwertigkeit oder den Gewichtsfaktor einer Zweierpotenz.
Beispiel: Binärzahl/Dualzahl 10010001 = 20 + 24 + 27 = 1 + 1610 + 12810 = 14510
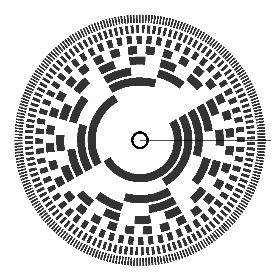
Bei nicht elektrischen Messgrößen kann man Binärziffern mittels Kodescheiben oder Kodelinealen darstellen, die so viele Bahnen besitzen, wie es Stellen gibt.
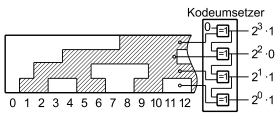
Beispiel: Winkelkodierer
- Im Bild wird mit 9 Fühlern längs des gezeichneten Radius von innen nach
außen die Binärzahl 111010101 330°
abgetastet, wenn hell 0
und dunkel 1
bewertet wird.
Durch Unvollkommenheit in der Justierung entstehen Fehler bei der Abtastung.
Im gezeigten Beispiel eines Kodelineals wird zwischen 11 und 12 eine 8 gelesen,
wenn unschraffiert 0
und schraffiert 1
bewertet wird. Dieser Fehler kann vermieden werden
- durch Doppelabtastung,
- durch Abtastung eines schmalen Synchronisationsfeldes in der Mitte des Feldes der feinsten Stufung,
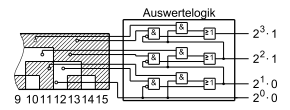
- durch Verwendung eines einschrittigen Kodes (im Bild Gray-Kode), in dem sich bei
jedem Übergang
 nur auf einer Spur ein Wert ändert; Nachteil: Keine Stellenwertigkeit auf den
Spuren. Zu Auswertelogik und Kodeumsetzer siehe nachfolgend den Abschnitt
"Bausteine der Binärtechnik".
nur auf einer Spur ein Wert ändert; Nachteil: Keine Stellenwertigkeit auf den
Spuren. Zu Auswertelogik und Kodeumsetzer siehe nachfolgend den Abschnitt
"Bausteine der Binärtechnik".
Bei intern binärer Darstellung ist zur Messwertanzeige an den beobachtenden Menschen eine Umkodierung auf eine Dezimalzahl erforderlich. Dazu muss das Gerät rechnen (dividieren) können, oder es verwendet die nachfolgende Mischform aus dezimal und binär.
BCD-Darstellung
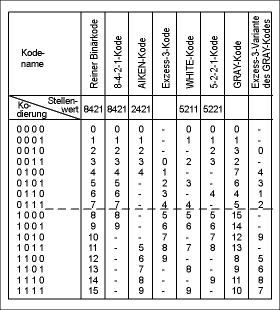
Mit einem BCD-Kode wird jede Dezimalstelle einzeln binär kodiert. Der Mindest-Aufwand beträgt 4 Binärziffern pro Dezimalziffer. Da von den 16 damit möglichen Bitkombinationen nur 10 gebraucht werden, gibt es mehrere gebräuchliche Kodes. Der 8-4-2-1-Kode hält die Stellenwertigkeit bei; andererseits vermeidet der Exzess-3-Kode die Kombinationen 0000 und 1111, die bei Fehlern besonders leicht auftreten können.
Beispiel im bevorzugten 8-4-2-1-Kode: 14510 = 0001 0100 0101.
Bus-Ankopplung
In der Automatisierungstechnik gibt es eine Reihe von „-->Feldbussen“, z.B. Profibus, Interbus, EtherCAT, bei denen die Darstellung der Binärzeichen, der zeitliche Ablauf, der Aufbau eines Telegramms, die Datensicherung und manches mehr festgelegt werden. Darauf kann hier jedoch nicht eingegangen werden.
Gerätetechnik
Vorbemerkungen
Vorab wird ein Abschnitt der Elektronik eingeschoben. Er beschränkt sich auf das Notwendigste, um dem Verständnis der darauf folgenden Abschnitte zu dienen.
Operationsverstärker
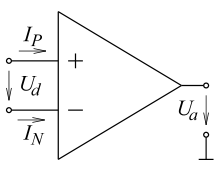
Hilfsanschlüsse, z.B. zur Speisung, werden im Allgemeinen nicht gezeigt
Der Operationsverstärker ist schlichtweg das Arbeitstier der Analog-Elektronik, da er je nach Beschaltung mit passiven Bauteilen für sehr vielfältige Aufgaben einsetzbar ist. Die entscheidende Formel zu seinem Verhalten lautet

mit  = Leerlauf-Spannungsverstärkung. Fast immer bestens zulässige Näherungen führen
zum „idealen Operationsverstärker“:
= Leerlauf-Spannungsverstärkung. Fast immer bestens zulässige Näherungen führen
zum „idealen Operationsverstärker“:

- Anwendung ohne Rückkopplung als Komparator
- Ohne Rückkopplung erfolgt keine Rückwirkung des Ausgangs auf den Eingang.
 kann nur zwei Werte annehmen:
kann nur zwei Werte annehmen:
- positiv übersteuert
- negativ übersteuert.
- Anwendung mit Rückkopplung auf den invertierenden Eingang
- In der Zeichnung ist der invertierende Eingang mit Minuszeichen gekennzeichnet.
- Die Schaltung kann ohne Übersteuerung analog-technisch betrieben werden.
Dazu muss sich wegen
 bei nicht übersteuertem Ausgang
bei nicht übersteuertem Ausgang  einstellen.
einstellen.
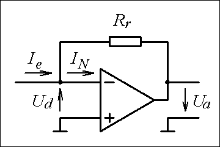
- Strom-Spannungs-Umformer
- Ein Strom-Spannungs-Umformer entsteht bei ohmscher Rückkopplung. Wegen
 fließt der gesamte Eingangsstrom
fließt der gesamte Eingangsstrom  durch den Rückkoppel-Widerstand. Bei einem positiven Eingangsstrom erzeugt
der Verstärker eine negative Ausgangsspannung
gerade so groß, dass
durch den Rückkoppel-Widerstand. Bei einem positiven Eingangsstrom erzeugt
der Verstärker eine negative Ausgangsspannung
gerade so groß, dass  wird. Damit gilt
wird. Damit gilt

 = konst > 0
= konst > 0-
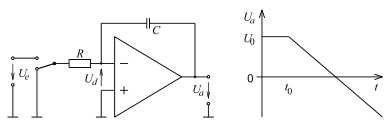
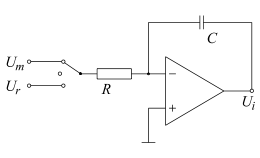
- Integrator
- Ein Integrator entsteht durch kapazitive Rückkopplung.
- Wenn zum Zeitpunkt
 an den Eingang die Spannung
geschaltet wird, und
an den Eingang die Spannung
geschaltet wird, und - wenn zum Zeitpunkt
am Ausgang die Spannung
 anliegt,
anliegt, - dann ist für

- Falls
= konst
- Das ergibt eine Gerade mit dem Anstieg



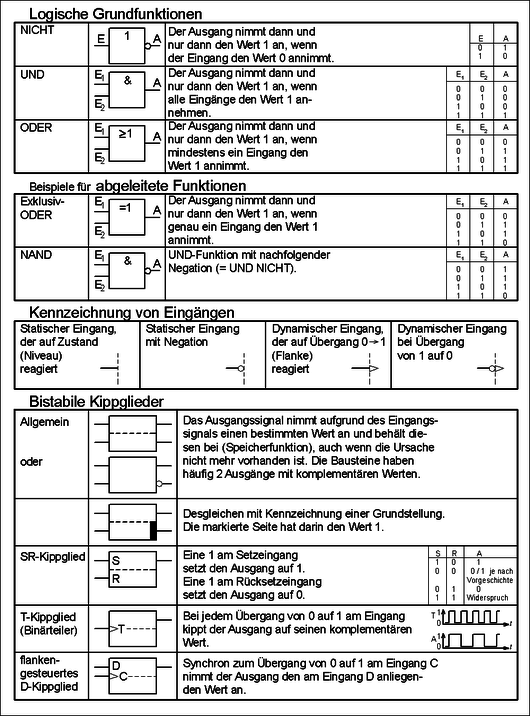
Bausteine der Binärtechnik
- Siehe auch Logikgatter, Flipflop
Zähler
Zähler arbeiten speichernd; sie haben eine Anzahl stabiler Zustände. Jeder Impuls bewirkt die Änderung des Speicherinhaltes um einen Ziffernschritt.
Zähler arbeiten bei befristeter Zählung mittelwertbildend über die Dauer der Zählung.
Mechanische Zähler haben Speicherglieder mit zehn stabilen Zuständen.
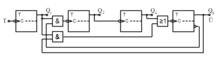
Elektronische Zähler haben Speicherglieder mit zwei stabilen Zuständen. In
Dezimalzählern wird dazu ein Speicherglied aus vier Kippgliedern hergestellt.
Zur Zählung über mehrere Dezimalstellen kann der Übertragsausgang Ü im gezeigten Schaltplan mit dem Takteingang T einer weiteren Zählstufe für die nächsthöhere Stelle verbunden werden.
Zähleraufbau und Zusatzeinrichtungen
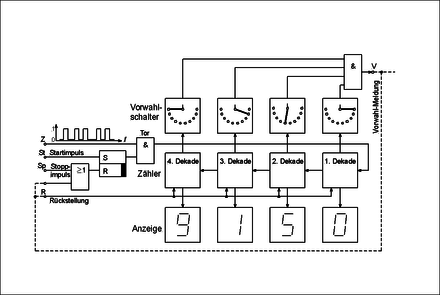
Der gezeigte vierstellige Dezimalzähler hat ein paar Zusatzeinrichtungen:
- Tor
- Nur solange am unteren Eingang eine 1 anliegt, gelangen Zählimpulse auf den Zähler.
- Rückstellung
- Damit lässt sich der Zähler auf 0 setzen.
- Vorwahl
- Bei Übereinstimmung aller Dezimalstellen mit der Vorwahl-Einstellung wird
eine Vorwahl-Meldung ausgegeben. Damit kann man weitere Ereignisse steuern,
z.B.
- Zählung beenden,
- Zähler zurücksetzen und ab 0 weiterzählen.
Darüber hinaus gibt es Vor-/Rückwärtszähler. Diese enthalten einen weiteren Steuereingang für die Zählrichtung und erfordern eine Meldung über die Richtung einer Veränderung. Solche Zähler werden beispielsweise verwendet
- bei der Positionsmessung mittels Inkrementalgeber, wenn beide Bewegungsrichtungen zulässig sind,
- bei der Spannungsmessung mittels Nachlauf-Umsetzer bei steigender oder fallender Spannung.
Zähleranwendungen
An einer etwas anderen Schaltung reagieren der Zähleingang Z und der Start-Stopp-Eingang S auf den Übergang von 1 nach 0 des Eingangssignals. Vielfältige Anwendungen werden anhand der Tabelle erklärt. Danach folgen einige Ergänzungen.
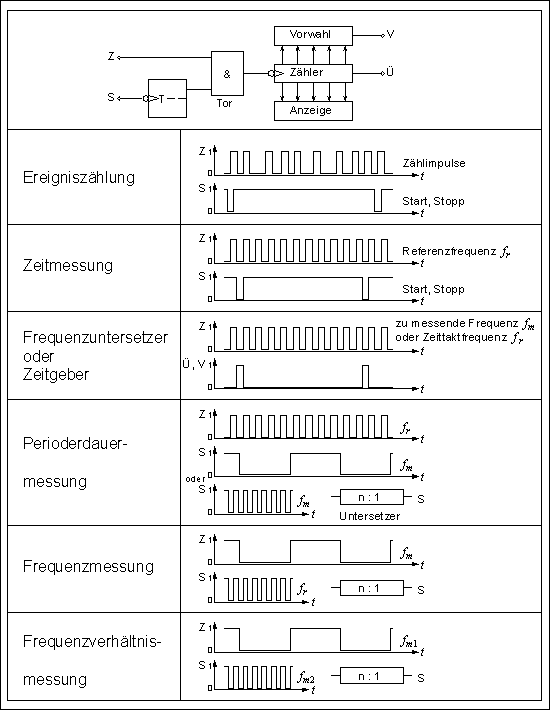
- Zeitmessung
- Beispiel mit der Annahme einer Referenzfrequenz
 = 1 kHz mit der Periodendauer
= 1 kHz mit der Periodendauer
 = 1 ms:
= 1 ms:
- Zwischen Start und Stopp seien
Impulse gezählt worden. Dann sind zwischen Start und Stopp ms
vergangen.
- Zwischen Start und Stopp seien
- Frequenzuntersetzer
- Frequenzuntersetzer für eine zu messende Frequenz

- Beispiel bei 5 Dezimalstellen:
- Am Übertragsausgang Ü Untersetzung 100 000 : 1.
- Beispiel bei an Vorwahlschaltern einstellbaren Zahl
 und bei automatischer Rücksetzung:
und bei automatischer Rücksetzung:
- Am Vorwahlausgang V Untersetzung : 1.
- Am Vorwahlausgang V Untersetzung
- Zeitgeber
- Zeitgeber mittels Referenzfrequenz
mit denselben Annahmen wie zuvor:
- An Ü erscheint ein Impuls alle 100 s.
- An V erscheint ein Impuls alle ms.
- Periodendauermessung
- Falls die Messung auf einen zu kleinen Zählerstand führt, ist die
Zähldauer zu verlängern mit einem Hilfszähler für
.
- Beispiel: Mit
= 1 kHz und
= 50 Hz ist der Zählerstand 20 ± 1,
- mit Voruntersetzer für
1000 : 1 ist der Zählerstand 20 000 ± 1.
- Hinweis: Ein Untersetzer 4000 : 1 mit Zähler-Ergebnis 80 000 ± 1 würde die relative Messunsicherheit weiter verkleinern, ist aber nicht angebracht. Die Umrechnung der Anzeige zum Messwert erfolgt üblicherweise nur in ganzen Zehnerpotenzen (keine numerische Rechnung, nur Kommaverschiebung);
- im Beispiel: Zählerstand 20 000 ergibt
 = 20,000 ms.
= 20,000 ms. - Frequenzverhältnismessung
- Anwendungsbeispiel: Kraftstoffverbrauchsmessung in Fahrzeugen
- Die nicht unmittelbar messbare Größe
 (in l / 100 km) kann gebildet werden aus der Division
(in l / 100 km) kann gebildet werden aus der Division durch
durch  . Da beide Größen leicht durch frequenz-proportionale Signale dargestellt
werden können,
. Da beide Größen leicht durch frequenz-proportionale Signale dargestellt
werden können,
 (Durchfluss) und
(Durchfluss) und  (Geschwindigkeit)
(Geschwindigkeit)
- ist die Division durch Bildung des Frequenzverhältnisses möglich.
Universalzähler
Die Realisierung der in vorstehender Tabelle gezeigten Vielfalt ist in einem einzigen Gerät möglich. Dieses benötigt
- Zähler für den anzuzeigenden Wert,
- Zähler als Hilfsuntersetzer,
- Präzisions-Frequenzgeber (Schwingquarz),
- Schalter zu unterschiedlichen Kombinationen der Baugruppen.
Fehlergrenzen am Beispiel der Zeitmessung
Garantiefehlergrenzen
Quarze haben Abweichungen in ihrer Frequenz
-
- typisch (selbst bei Konsumartikeln möglich)
 < 10−5,
< 10−5, - mit höherem Aufwand (z.B. Thermostatisierung im Quarzofen) ist erreichbar < 10−8,
- Atomuhr-Frequenzstandards (z.B. Rubidium-Oszillator) schaffen < 10−11.
- typisch (selbst bei Konsumartikeln möglich)
Bei Zählern über 5 Dekaden (also Zählerstand
< 105) mit Verwendung einer Quarzzeitbasis gilt durch diese
typischen Fehlergrenzen der Referenzfrequenz

Der Aufwand bezüglich der Fehlergrenzen des Quarzes ist beim gegebenen Zähler optimal gewählt; es lohnt nicht, die Garantiefehlergrenzen unter einen Quantisierungsschritt zu drücken.
Messunsicherheit
Für die Messunsicherheit durch Zählung gilt am Beispiel einer zu messenden Zeit

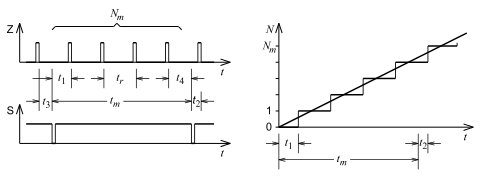
Die digital angezeigte Zeit unterscheidet sich von der richtigen Zeit um die Messabweichung

Da diese Differenz positiv oder negativ sein kann, dem Betrage nach aber
kleiner als  bleibt, gilt die bekannte Tatsache
bleibt, gilt die bekannte Tatsache


Gelingt es im Sonderfall,
- den Taktgeber mit dem Beginn des auszumessenden Vorgangs zu synchronisieren oder
- den Vorgang synchron mit dem Taktgeber zu starten,
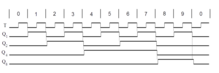
so halbiert sich die Breite der möglichen Abweichung, und je nach Ausführung liegt diese zwischen

und

Das sieht man im nächsten Bild mit schmalen Impulsen – je nachdem, ob die Schaltung auf fallende oder steigende Flanken reagiert.
Bei einer Frequenzuntersetzung aus einem fortlaufenden Takt gibt es Synchronisation sowohl am Anfang wie am Ende der erzeugten Periode, so dass das Frequenzverhältnis immer exakt ist.
Digital-Analog-Umsetzer (DAU)
DAU in der Messtechnik
Es gibt nur wenige physikalische Größen, bei denen eine Quantelung bekannt ist. Da selbst diese quantisierte Natur praktisch nicht erkennbar ist, besteht für einen DAU als Messgerät kein Bedarf. (Wer misst schon einen elektrischen Strom dadurch, dass Elektronen gezählt werden, außer bei unter 10−16 A?) Da der DAU aber Bestandteil mancher Messgeräte und einfach ein Gegenstück zum ADU ist, soll er hier behandelt werden.
Ein Digital-Analog-Umsetzer ist streng genommen etwas Widersinniges: Aus etwas Gestuftem lässt sich nicht etwas Stufenloses machen. Der DAU soll vielmehr so verstanden werden: Er setzt eine digital kodierte Information um in eine Form, die ein analog arbeitendes Gerät verstehen kann.
Repräsentative Ausführungen
Von den zahlreichen Entwicklungen werden hier drei erläutert.
DAU mit gewichteten Widerständen
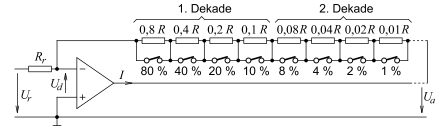
Die Schaltung zeigt einen DAU mit Spannungssummierung durch gewichtete
Widerstände in BCD-Darstellung. Hier entsteht die Spannung
durch Vorgabe von zwei Dezimalziffern in 8-4-2-1-Kode sowie der Referenzspannung  .
.
ist einstellbar durch Öffnen von Schaltern zwischen 0 und 99 % von  in einer Schrittweite von 1 %. Bei Bedarf für feinere Auflösung können
weitere Dekaden angehängt werden, solange das von der Qualität der Widerstände
und Schalter her zu verantworten ist. (Denn unerwünschte Eigenschaften von
Schaltern und Widerständen beeinflussen mitunter die Ungenauigkeit der
Ausgangsgröße.)
in einer Schrittweite von 1 %. Bei Bedarf für feinere Auflösung können
weitere Dekaden angehängt werden, solange das von der Qualität der Widerstände
und Schalter her zu verantworten ist. (Denn unerwünschte Eigenschaften von
Schaltern und Widerständen beeinflussen mitunter die Ungenauigkeit der
Ausgangsgröße.)

- wegen
(virtuelle
Masse); unabhängig von den Schalterstellungen.
Durch jede binäre Eins der binär kodierten -stelligen
Dezimalzahl wird jeweils der zugehörige Schalter geöffnet und somit der
betreffende Widerstand in die Kette der Widerstände eingeschleift.

DAU mit Widerstandskettenleiter
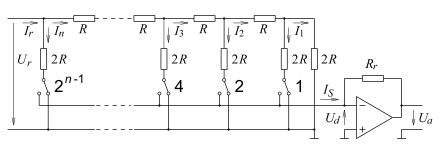
Die Schaltung zeigt einen DAU mit Stromsummierung durch
Widerstandskettenleiter (R-2R-Netzwerk)
in Binärdarstellung. Es gibt nur zwei Widerstandswerte unabhängig vom Stellenwert
der jeweiligen Ziffer. Hier entsteht die Spannung
durch Vorgabe von
Binärziffern.

- für
 .
.
- für
 .
.
Durch jede Eins der Binärzahl wird jeweils der zugehörige Schalter nach links
gelegt, und der hindurch fließende Strom wird auf die Sammelleitung von  geschaltet. Dieser Summenstrom fließt weiter durch den Rückkoppelwiderstand
geschaltet. Dieser Summenstrom fließt weiter durch den Rückkoppelwiderstand
 zum Ausgang des Operationsverstärkers.
zum Ausgang des Operationsverstärkers.


Allgemein: Für die beiden bisher gezeigten Ausführungen werden benötigt
- Präzisions-Spannungsquelle,
- Präzisionswiderstände,
- Halbleiterschalter, die möglichst ideal sperren oder leiten.
DAU mit Pulsweitenmodulation
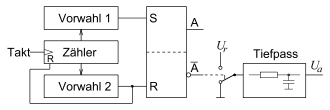
Die Schaltung zeigt einen DAU mit Pulsweitenmodulation.
Hier entsteht die Spannung
durch Vorgabe einer Zahl für den Tastgrad
einer Rechteckspannung.
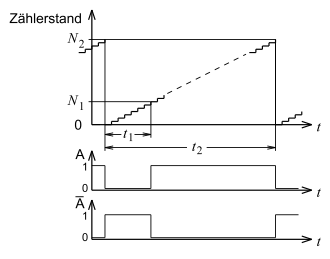
Ein anfangs auf null gestellter Zähler erfasst eine Taktfrequenz
und vergleicht seinen Zählerstand mit zwei vorgewählten Zahlen. Bei Erreichen
der ersten Zahl  (nach einer Zeit
(nach einer Zeit  )
wird ein SR-Kippglied auf A = 1 gesetzt. Bei Erreichen der zweiten
Zahl
)
wird ein SR-Kippglied auf A = 1 gesetzt. Bei Erreichen der zweiten
Zahl  (nach einer Zeit
(nach einer Zeit  )
wird das Kippglied auf A = 0 gesetzt, und auch der Zähler wird auf
null zurückgestellt. Solange A = 0 ist, wird an einen Tiefpass oder Mittelwertbilder
eine Referenzspannung
gelegt, für den Rest der Periodendauer wird Null-Potential angelegt. Der
arithmetische Mittelwert dieser Spannung ist
)
wird das Kippglied auf A = 0 gesetzt, und auch der Zähler wird auf
null zurückgestellt. Solange A = 0 ist, wird an einen Tiefpass oder Mittelwertbilder
eine Referenzspannung
gelegt, für den Rest der Periodendauer wird Null-Potential angelegt. Der
arithmetische Mittelwert dieser Spannung ist

Der Vorteil dieser Schaltung liegt im Verzicht auf Präzisionswiderstände und viele Schalter, der Nachteil liegt in ihrer langsamen Reaktion durch den Tiefpass.
Mit
legt man die Feinheit der Stufung und die Periodendauer
fest. Mit
legt man die Spannung fest, wobei  ist. Darf die kleinste Schrittweite 0,4 % vom Endwert betragen, so wählt
man ≈ 250,
wozu ein Zähler mit 8 Bit reicht. Bei
= 1 MHz ist dafür
= ¼ ms erforderlich. Mikroprozessor-Schaltungen bieten Zähler mit
16 Bit an; damit ist die Auflösung viel feiner möglich, aber dann ist im
Maximalfall
= 65 ms, und die Reaktionszeit liegt je nach Anforderung an die Glättung
bei ≫ 200 ms.
ist. Darf die kleinste Schrittweite 0,4 % vom Endwert betragen, so wählt
man ≈ 250,
wozu ein Zähler mit 8 Bit reicht. Bei
= 1 MHz ist dafür
= ¼ ms erforderlich. Mikroprozessor-Schaltungen bieten Zähler mit
16 Bit an; damit ist die Auflösung viel feiner möglich, aber dann ist im
Maximalfall
= 65 ms, und die Reaktionszeit liegt je nach Anforderung an die Glättung
bei ≫ 200 ms.
Analog-Digital-Umsetzer (ADU)
Messgeräte für Prozessgrößen
Bereits in den vorhergehenden Abschnitten sind verschiedene Analog-Digital-Umsetzer behandelt worden zur
- Frequenzmessung (Drehzahl-, Durchflussmessung)
- Volumenmessung
- Winkel- und Längenmessung
- inkrementales Verfahren mit Strichscheibe
- absolutes Verfahren mit Kodescheibe,
- Zeitmessung.
Elektrische Spannungsmessgeräte
Ausführungsarten
Je nach Messaufgabe steht eine Vielzahl von Geräten nach folgenden Gesichtspunkten zur Auswahl:
| Messwertausgabe | ||
|---|---|---|
| mit Rechneranschluss | mit Sichtanzeige | |
| Messwertdarstellung und -auflösung | ||
| in reinem Binärkode mit 8 … 14 (… 28) Stellen |
in BCD-Darstellung mit 2000 … 100 000 Punkten oder "3½-stellig" … 5-stellig (… 8½-) | |
| Absolute Auflösung | ||
kleinste auflösbare Spannung:
| ||
| Arbeitsweise | ||
| Schnell mit Momentanwert-Quantisierung – bei rasch veränderlichen Messgrößen oder wenn eine größere Anzahl von Messstellen über Umschalter (Multiplexer) abgefragt werden soll. | Langsam mit Mittelwertbildung (Integration) – zur Unterdrückung von Netzbrummen (netzsynchrone Stör-Wechselspannung) oder Störimpulsen (aus Schaltvorgängen). | |
Messdatenerfassung
mit Multiplexer |
Integration schwächt den Störeinfluss ab. Integration über ein
ganzzahliges Vielfaches der Periodendauer des Störsignals unterdrückt ihn
völlig; der in der Spannung enthaltene Gleichanteil oder Mittelwert  bleibt erhalten.
bleibt erhalten. | |

Repräsentative Ausführungen
Von den zahlreichen Entwicklungen werden hier vier erläutert, zwei schnelle und zwei integrierende.
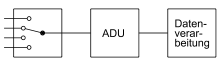
Parallel-Umsetzer
Die zu messende Spannung  wird mit allen möglichen Quantisierungsstufen gleichzeitig verglichen. Zur
Gewinnung einer -stelligen
Binärzahl benötigt man
wird mit allen möglichen Quantisierungsstufen gleichzeitig verglichen. Zur
Gewinnung einer -stelligen
Binärzahl benötigt man  Komparatoren.
Komparatoren.
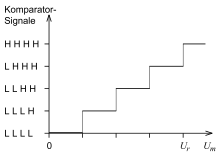
Zur Funktionsweise am Beispiel mit  :
:
- Es werden vier vom Spannungsteiler gebildete Spannungen ,
 ,
,
 ,
,
 gleichzeitig mit
verglichen. Dieser aus Gründen der Übersichtlichkeit sehr grob gestufte
Umsetzer kann nur 4 verschiedene Messwerte liefern. Der vierte Komparator für
die höchste Stufe der Kennlinie
liefert einen fünften Wert: Überschreitung des Messbereichs.
gleichzeitig mit
verglichen. Dieser aus Gründen der Übersichtlichkeit sehr grob gestufte
Umsetzer kann nur 4 verschiedene Messwerte liefern. Der vierte Komparator für
die höchste Stufe der Kennlinie
liefert einen fünften Wert: Überschreitung des Messbereichs.
Parallel-Umsetzer sind extrem schnell („flash-converter“) und extrem aufwändig. Ausführungen mit ≥ 6 Bits arbeiten in der Spitzenklasse bei einer Umsetzzeit ≤ 1 ns (Umsetzrate ≥ 1 GHz). Auch sind integrierte Umsetzer mit 10 Bits (1023 Komparatoren) auf dem Markt.
Eine Weiterentwicklung sind die Pipeline-Umsetzer. Sie sind aus mehreren selbständigen Stufen in Pipeline-Architektur aufgebaut. Ihre Stufen bestehen in der Regel aus Parallel-Umsetzern über wenige Bits. In jeder Pipelinestufe wird eine grobe Quantisierung vorgenommen, dieser Wert wieder mit einem DAU in ein analoges Signal umgesetzt und vom zwischengespeicherten Eingangssignal abgezogen. Der Restwert wird verstärkt und der nächsten Stufe zugeführt. Die Vorteile liegen in der stark verminderten Anzahl an Komparatoren (60 für vier Vier-Bit-Umsetzerstufen) und in der höher möglichen Auflösung bis 16 Bit. Mit jeder Stufe erhöht sich die Latenzzeit, aber die Abtastrate vermindert sich nur wegen der bei höherer Auflösung längeren Einschwingdauer.
Serieller Umsetzer
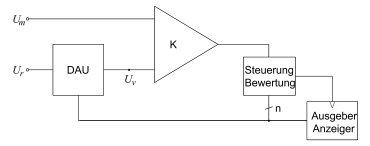
Die zu messende Spannung
wird mit einer am DAU erzeugten Spannung
verglichen. Nacheinander wird
in mehreren Schritten verändert und an
möglichst genau angenähert. Dazu gibt es mehrere Strategien; hier wird die
sukzessive Approximation mit dem Wäge- oder Kompensationsverfahren erklärt.
Zur Funktionsweise
| Annahme: |
> 0 und
> 0 |
| Schritt 1a: | Es wird eine Vergleichsspannung
erzeugt, indem das höchstwertige Bit auf 1 gesetzt wird und alle anderen auf 0. |
| Schritt 1b: | Wenn  , dann wird das Bit auf 0 zurückgesetzt.
, dann wird das Bit auf 0 zurückgesetzt.Wenn  , dann wird das Bit auf 1 gelassen.
, dann wird das Bit auf 1 gelassen. |
| Schritt 2a: | Eine 1 auf dem nächst niederwertigeren Bit wird hinzugefügt. |
| Schritt 2b: | Wie Schritt 1b |
| u. s. w. |
Zur Gewinnung einer -stelligen
Binärzahl benötigt man
Vergleiche. Zum Schluss ist  .
Dabei ist
der kleinste am DAU einstellbare Spannungssprung.
.
Dabei ist
der kleinste am DAU einstellbare Spannungssprung.
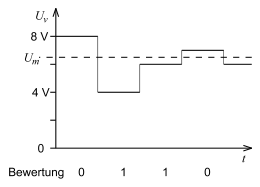
- Beispiel hierzu:
- 4-Bit-DAU mit
= 1 V bei
= 6,5 V.
- Gemäß Signal-Zeit-Diagramm erhält man den Messwert = 0110B ⋅
= 6 V.
Das zum Schluss eingestellte Eingangssignal des DAU wird als Ergebnis des ADU angesehen (binär oder BCD gestuft).
Messung von Augenblickswerten;
darf sich allerdings während der Einstellung von
nicht ändern. Dazu wird oft eine Sample-and-Hold-Schaltung
verwendet, die
während der Umsetzung analog zwischenspeichert. Typische Umsetzdauer
1 … 100 μs.
ADU mit der Zwischengröße Zeit
Das Verfahren wird am Zweirampen- oder Dual-Slope-Verfahren erklärt.
Die zu messende Spannung
lädt für eine begrenzte Dauer den Kondensator eines Integrators (siehe oben im
Abschnitt Operationsverstärker).
Danach wird der Kondensator wieder kontrolliert entladen. Beide Vorgänge laufen
bei Gleichspannung aufgetragen über der Zeit rampenförmig (linear) ab.
Zur Funktionsweise
| Annahme: |  ;
dann ;
dann 
|
| Beginn: | bei  mit
mit 
|
| Schritt 1: | Aufintegration (Aufladung des Kondensators) mit
für eine feste Dauer, z.B.  = 20 ms.
= 20 ms.
 |
| Schritt 2: | Abintegration mit
auf festen Endwert .


|

 (Zwischengröße)
(Zwischengröße)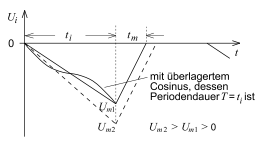
Beide Zeiten werden durch Zählung bestimmt. Angezeigt wird
 .
.
Für die Aufintegrations-Dauer verwendet wird
 .
.
 unabhängig von
unabhängig von  .
.
 steht für den über die Dauer der Aufintegration gemittelten Wert der zu
messenden Spannung; wirksame Störunterdrückung von 50-Hz-Signalen, wenn
steht für den über die Dauer der Aufintegration gemittelten Wert der zu
messenden Spannung; wirksame Störunterdrückung von 50-Hz-Signalen, wenn  ;
mit
;
mit  ,
ganzzahlig. Dann ist
,
ganzzahlig. Dann ist 
Typische Integrationsdauer 1 … 300 ms. Geräte mit  bieten gute Unterdrückung von Netz-Einkopplung weltweit, sowohl bei 50-Hz- als
auch bei 60-Hz-Netzen.
bieten gute Unterdrückung von Netz-Einkopplung weltweit, sowohl bei 50-Hz- als
auch bei 60-Hz-Netzen.
ADU mit der Zwischengröße Häufigkeit
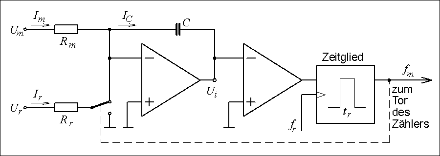
Das Verfahren wird am Ladungsbilanz- oder Charge-Balancing-Verfahren erklärt.
Die zu messende Spannung
lädt in einem Integrator den Kondensator. Durch kurze Stromstöße in
Gegenrichtung wird er ständig wieder entladen; im Mittel ist die Ladungsbilanz
ausgeglichen.
Zur Funktionsweise
| Annahme: | ;
dann
|
| ferner: |  > 2 ⋅ Maximalwert von
> 2 ⋅ Maximalwert von 
|
| Beginn: | bei
mit
|
| Schritt 1: | Laden mit  für feste kurze Dauer
,
für feste kurze Dauer
,wobei  ≪ 20 ms
≪ 20 ms |
| Schritt 2: | Entladen mit  auf festen Endwert
auf festen Endwert
|
| Schritt 3: | wie Schritt 1 |
| u. s. w. |
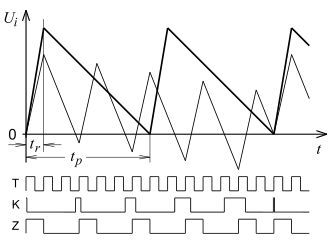
Das Signal-Zeit-Diagramm zeigt im oberen Teil die Spannung  am Ausgang des Integrators bei einer zu messenden Gleichspannung .
Längs der dickeren Sägezahn-Linie ist nach einer Periode jeweils die
Ladungsbilanz ausgeglichen.
am Ausgang des Integrators bei einer zu messenden Gleichspannung .
Längs der dickeren Sägezahn-Linie ist nach einer Periode jeweils die
Ladungsbilanz ausgeglichen.

-
 (Zwischengröße)
(Zwischengröße)
Die Messung von
führt durch Zählung für die Dauer
auf den Zählerstand
, der angezeigt wird.
Als Zeitgeber für
wird die Frequenz
gezählt bis zum Zählerstand  ;
;

Zur Größenordnung:
= einige 100 ms.
Die im Bild dünnere Sägezahnlinie unterscheidet sich von der dickeren in zwei Punkten:
- Die Spannung
ist um den Faktor 5/2 größer und erzeugt eine um denselben Faktor größere Zahl
von Ladezyklen.
- Die Meldung des Komparators startet das Zeitglied nicht sofort.
In der hier gezeigten Schaltung erzeugt das Zeitglied die Dauer
präzise von einer steigenden Flanke von
bis zur nächsten. Durch diese Synchronisation des Zeitgliedes an die
Taktfrequenz läuft
nicht nur bis zur Nulllinie, sondern weiter bis zum Zeitpunkt der
Synchronisation. Die damit verbundene Abweichung macht aber weniger als einen
Ziffernschritt aus – über eine beliebig lange Zähldauer. Die drei
Rechtecksignale im Bild erläutern den Vorgang zum Verlauf der dünneren Linie von
- oberes Signal für den Takt (also ),
- mittleres Signal für den Ausgang des Komparators,
- unteres Signal für den Ausgang des Zeitgliedes.
In der Zähldauer
fließt der Strom
ständig. Zusätzlich wird
mal kurzzeitig der Strom  eingeschaltet, so dass der Kondensator sich im Mittel nicht auflädt.
eingeschaltet, so dass der Kondensator sich im Mittel nicht auflädt.


 nur abhängig von der Referenzspannung und einem Widerstandsverhältnis,
unabhängig von
nur abhängig von der Referenzspannung und einem Widerstandsverhältnis,
unabhängig von  .
.
In seiner messtechnischen Qualität ist dieses Verfahren mit dem
Zweirampenverfahren ähnlich, aber diesem noch etwas überlegen (
ist ununterbrochen eingeschaltet).
Messabweichungen
Für Messabweichungen, die allein durch die Unvollkommenheit des digitalen Spannungsmessgerätes bedingt sind, werden in der Regel vom Hersteller Fehlergrenzen angegeben. Diese setzen sich aus zwei Anteilen zusammen,
- aus der Vergleichsgröße resultierend (und eventuell weiteren multiplikativ ins Ergebnis eingehenden Ursachen) und
- aus Nullpunkt und Digitalisierung resultierend (und eventuell weiteren additiv eingehende Ursachen).
Beispiele zur korrekten Angabe und Verwendung siehe unter Messgeräteabweichung und Digitalmultimeter.
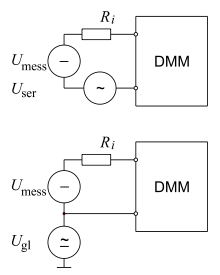
Als wichtige Einflussgrößen, die Messabweichungen hervorrufen können und die in den Geräte-Fehlergrenzen nicht enthalten sind, kommen infrage
- Stromaufnahme der Eingangsklemmen,
sowie bedingt durch die Eigenschaften der angelegten Spannung
- Frequenz,
- Kurvenform,
- überlagerte Störspannung,
- Serienstörspannung, die bei integrierenden Verfahren unterdrückbar ist z.B. um den Faktor 10−3 bei 50 und 60 Hz,
- Gleichtaktstörspannung, die bei integrierenden Verfahren unterdrückbar ist z.B. um den Faktor 10−5 bei 0 … 10 kHz.
Anmerkung
Grundlage des Artikels ist das zweibändige Werk
F. Dokter und J.
Steinhauer: Digitale Elektronik in der Meßtechnik und
Datenverarbeitung.
Band I: Theoretische Grundlagen und
Schaltungstechnik. 1969
Band II: Anwendung der digitalen
Grundschaltungen und Gerätetechnik. 3. Auflage, 1973
Philips Fachbücher,
Hamburg.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 11.05. 2024