Pulsweitenmodulation
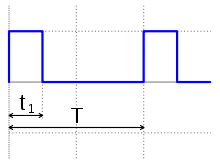
Die Pulsweitenmodulation (kurz PWM; auch Pulsdauermodulation, PDM; Pulslängenmodulation PLM; Unterschwingungsverfahren oder Pulsbreitenmodulation, PBM; englisch pulse-width modulation, PWM) ist eine Modulationsart, bei der eine technische Größe (z.B. elektrische Spannung) zwischen zwei Werten wechselt. Dabei wird bei konstanter Frequenz der Tastgrad eines Rechteckpulses moduliert, also die Breite der ihn bildenden Impulse.
Modulation
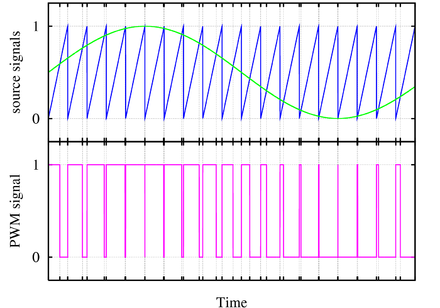
Ein reines pulsbreitenmoduliertes Signal wird beispielsweise erzeugt, indem ein linear an- oder absteigendes Signal (Dreieck- oder Sägezahnspannung) mit dem analogen Eingangssignal verglichen wird, das je nach seinem Wert eine kurze oder eine lange Zeit über diesem liegt. An den Schnittpunkten wird das Ausgangssignal zwischen zwei Logikpegeln umgeschaltet. Es hat damit wie ein Digitalsignal den Vorteil, dass es nur – hier: zwei – diskrete Werte annehmen kann (siehe unten unter Einsatzgebiete), ist aber in seinem Tastgrad stufenlos veränderbar, d.h. nicht zeitdiskret.
Eine einfachere Möglichkeit besteht darin, eine der Zeitkonstanten einer astabilen Kippstufe mit dem Eingangssignal zu beeinflussen. Da die andere Zeitkonstante sich dabei nicht proportional ändert, erhält man eine Mischung aus Pulsbreiten- und Frequenzmodulation, was je nach Verwendungsfall eine Bedeutung hat.
Zur Erzeugung eines PWM-Signals aus digital vorliegenden Daten (z.B.: Motorsteuerung) kommen geeignete Zähler/Vergleicherschaltungen zum Einsatz. Viele ikrocontroller enthalten bereits direkt PWM-Module oder unterstützen durch geeignete Timer-Funktionen deren Implementierung.
Demodulation
Ein PWM-Signal wird allgemein über einen Tiefpass demoduliert. Die resultierende demodulierte technische Größe entspricht dem Gleichwert und damit der mittleren Höhe der Fläche unter der modulierten Größe, mathematisch bestimmt aus dem Integral über eine ganze Zahl von Perioden, geteilt durch die Dauer der Integration.
Ein anschauliches Beispiel für diese Modulationsart ist ein Schalter, mit dem man eine Heizung ständig ein- und ausschaltet. Je länger die Einschaltzeit gegenüber der Periodendauer ist, umso höher ist die mittlere Heizleistung. Die Temperatur des geheizten Gebäudes kann nur vergleichsweise langsam dem Ein- und Ausschaltvorgang folgen; durch seine thermische Trägheit ergibt sich das notwendige Tiefpassverhalten zur Demodulation.

Einsatzgebiete
Die Pulsweitenmodulation wird zur Informationsübertragung und zusätzlich häufig zur Steuerung der Energieumwandlung in einem technischen System eingesetzt.
Messtechnik
Pulsweitenmodulation wird oft eingesetzt, um analoge Messwerte von Sensoren über lange Leitungen oder Funk zu übertragen. Da an langen Leitungen ein Spannungsabfall entsteht, würde bei Übertragung der Information in Form einer Spannungshöhe eine Verfälschung entstehen. Bei der Übertragung mit Pulsbreitenmodulation reicht es aus, wenn der Empfänger noch die Pegel 1 und 0 unterscheiden kann. Gleiches gilt auch bei einer Übertragung per Funk, wo die Empfangsintensität durch viele Umweltfaktoren beeinflusst wird.
Steuerungstechnik
Um analoge Signale über eine digitale Strecke zu übertragen, nutzt man die glättende Tiefpasswirkung einer Kapazität oder Induktivität, z.B. eines Motors oder einer Spule, um diese mit Hilfe einer Impulsfolge zu steuern. So lassen sich mit digitalen Schaltungen (z.B. Mikrocontrollern), die nur geschaltete Signale erzeugen können, analoge Geräte (Motoren, Heizungen usw.) ansteuern.
Das Steuergerät muss nicht zwangsläufig selbst ein digitales Gerät sein. So wird zum Beispiel zur Steuerung von Servos (Übertragung des Sollwertes) ein analoger Wert von einem Drehpotentiometer moduliert und im Servo wieder demoduliert. Allgemein wird dies angewendet, wenn sowohl Vorteile von analogen Signalen (hohe Auflösung, einfache, robuste und störungssicherere Technik) als auch Vorteile von digitalen Signalen (Konstanz, einfache, effiziente Verstärkung) nötig sind.
Eine Steuerung über PWM kommt zum Zweck einer Drehzahländerung von neueren Gehäuse- und CPU-Lüftern zum Einsatz.
Ein weiteres Anwendungsbeispiel ist das Dimmen durch PWM-Steuerung. Diese Technik wird insbesondere bei Leuchtdioden (LEDs), wie sie auch oft als Hintergrundbeleuchtung bei Mobiltelefonen oder auch bei Cockpit-Anzeigen oder Bremsleuchten in neueren Kraftfahrzeugen eingesetzt werden, verwendet. Bei ausreichend kurzer Ein- und Ausschaltdauer nimmt das menschliche Auge nur die durchschnittliche Leuchtstärke wahr, sodass diese mit dem Tastgrad linear gesteuert werden kann. Hierbei ist darauf zu achten, dass die Taktfrequenz ausreichend hoch angesetzt ist (beispielsweise 10 kHz), sodass das Auge, auch bei schneller Bewegung, keine Helligkeitsschwankungen (Flimmern) wahrnehmen kann. Bei hohen Schaltfrequenzen bleibt auch die Energie eines Einzelimpulses klein im Bezug auf die Wärmekapazität des emittierenden Chips. Die kurzzeitige Spitzentemperatur des Bauteils während des Pulses verbleibt daher bei hohen Schaltfrequenzen nahe der Temperatur, welche der mittleren Leistung des PWM-Signals entspricht. Dies ist besonders für temperaturempfindliche Verbraucher wie Hochleistungsleuchtdioden von großem Vorteil. Eine Tiefpassfilterung ist bei Ansteuerung von LEDs nicht gewünscht, da Farbe und Wirkungsgrad stromabhängig sind und die Leuchtstärke stark nichtlinear von dem Betriebsstrom abhängt.
Leistungselektronik
Der Mittelwert einer Spannung kann mittels PWM stufenlos proportional zum Tastgrad vermindert werden. Die Einstellung der verminderten Spannung ist bei relativ geringer Verlustleistung möglich, da die Leistungsschalter (außer in den Umschaltmomenten) nur in zwei Zuständen betrieben werden: Voll sperrend (nur Leckstrom bei voller Spannung) oder voll durchgeschaltet (nur Durchlassspannung bei voller Stromstärke). Damit hat die PWM auch in der Leistungselektronik Bedeutung.
Einsatzbereiche sind Gleichstromsteller, Frequenzumrichter bzw. Elektromotoren, Inverter für das Widerstandspunktschweißen, Heizelemente, Dimmer, Schaltnetzteile, Klasse-D-Verstärker und elektronisch kommutierte Ventilatoren.
Analog-Digital-Umsetzer
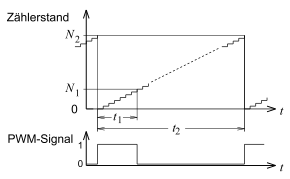
Ein pulsbreitenmoduliertes Signal kann direkt von digitaler Elektronik verarbeitet werden, z.B. mittels eines Binärzählers und eines höherfrequenten Zähltaktes. Zur Erfassung der Pulsbreite wird bei der positiven Flanke der Zähler auf 0 gesetzt, bei der negativen Flanke wird er gelesen (Wert N1 ). Die Pulsperiodendauer muss dabei konstant sein, am besten abgeleitet aus demselben Zähltakt durch Zählung bis N2 .
Ein ähnliches Verfahren wird zum Beispiel am Joystickanschluss (Steuerknüppel) auf der Soundkarte von PCs angewendet (wobei der Beginn des Impulses hier vom Programm ausgeht).
Digital-Analog-Umsetzer
Ein weiterer Einsatzbereich findet sich bei Digital-Analog-Umsetzern in der Messtechnik und zur Klangerzeugung z.B. in Synthesizern oder bei CD-Spielern.
Nachrichtentechnik
Die Pulsdauermodulation findet Anwendung bei der drahtlosen Übermittlung physikalischer Größen (Telemetrie) und zur energiesparenden Erzeugung einer Amplitudenmodulation in Großsendern.
Erzeugung
Aus analogen Signalen
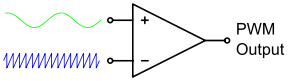
Ein PWM-Signal kann auch mittels eines analogen Komparators durch Vergleich des Analogsignals mit einem geeigneten Trägersignal erzeugt werden, wie in nebenstehender Schaltskizze dargestellt, wobei als Modulationssignal vor allem Sägezahn- und Dreieckssignale zum Einsatz kommen:
- Ansteigendes Sägezahnsignal (rückflankenmoduliert): Die Vorderflanke (ansteigende Flanke) der Schaltfunktion ist fest und die Position der Rückflanke (abfallende Flanke) wird moduliert.
- Abfallendes Sägezahnsignal (vorderflankenmoduliert): Die Position der Vorderflanke der Schaltfunktion wird moduliert und die Rückflanke bleibt fest.
- Dreiecksignal für symmetrische Modulation: Bei dieser Modulationsart werden die Positionen beider Flanken der Schaltfunktion moduliert. Ändert sich der Sollwert innerhalb einer Trägerperiode nur wenig, so sind die beiden Schaltflanken näherungsweise symmetrisch zu den Scheitelpunkten des Dreieckssignals.
Eine weitere Möglichkeit zur Erzeugung von Pulsweitenmodulation bildet ein Multivibrator, bei dem der Tastgrad durch einen variablen Widerstand oder Kondensator verändert werden kann.
Für die Ermittlung der Pulsdauer wird zum Ansatz gebracht, dass der arithmetische Mittelwert des zu modulierenden Signals in einer Pulsperiode genau dem Gleichwert der PWM-Impulsfolge entsprechen soll. Beide Funktionsverläufe (Analogsignal und PWM-Signal) haben also in einem Pulsintervall bei einem Spannungssignal die gleiche Spannungs-Zeit-Fläche.
Aus digitalen Signalen
Zur Erzeugung eines PWM-Signals aus digital vorliegenden Daten (z.B.: Motorsteuerung) kommen geeignete Zähler/Vergleicherschaltungen zum Einsatz. Viele Mikrocontroller enthalten bereits direkt PWM-Module oder unterstützen durch geeignete Timer-Funktionen deren Implementierung. In Umkehrung des oben beschriebenen Analog-Digital-Umsetzers werden zu einer gegebenen Taktfrequenz die Werte N1 und N2 vorgegeben, wodurch sich die Impulsbreite t1 und die Periodendauer t2 einstellen.
Probleme in der Praxis
Ein erhebliches Problem bei Einsatz des Verfahrens der PWM in der Praxis ist die Bildung von Oberschwingungen (ugs. Oberwellen). Diese bilden sich als Vielfache der Modulationsfrequenz und können in den mittels PWM angesteuerten Induktivitäten unerwünschte Nebeneffekte wie Geräuschbildung, Erwärmung und Probleme mit Elektromagnetischer Verträglichkeit führen. Abhilfe kann hier durch Kompensation mittels einer zugeschalteten Kapazität oder durch Veränderung der Modulationsfrequenz der PWM geschaffen werden. Typische Anwendungen, die auch ebendiese Problematik behandeln, sind Frequenzumrichter bzw. die Choppersteuerung.
Vorteile der Pulsweitenmodulation
Der Vorteil des PWM-Signals besteht darin, dass es durch zwei Spannungsebenen (Low- und High-Pegel) gebildet wird. Bei der schaltungstechnischen Realisierung eines PWM-Generators mittels Bipolar- oder MOS-Transistoren oder IGBTs können diese – im Gegensatz zu einem Generator mit kontinuierlich (analog) veränderlicher Spannung – im verlustarmen Schaltbetrieb arbeiten. Die beiden Spannungsebenen des Rechtecksignals entsprechen zwar zwei Logikpegeln, diese stellen aber keine Ziffern eines Binärcodes dar. Die Information steckt in dem analogen Pulsbreitenverhältnis. Es lassen sich Signalverstärker bei PWM-Frequenzen im unteren Kilohertzbereich sogar bis in den oberen Kilowattbereich hinein realisieren. In der Elektronik sind Verstärker nach dem PWM-Prinzip unter der Bezeichnung Klasse-D-Verstärker (Class-D, Digitalverstärker) bekannt.
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 19.06. 2024