Konvektive Koordinaten
Konvektive Koordinaten sind krummlinige Koordinaten, die an einen Träger gebunden sind und von allen Transformationen, die der Träger erfährt, mitgeführt werden, daher die Bezeichnung konvektiv. In der Kontinuumsmechanik ergeben sich konvektive Koordinaten auf natürliche Weise, wenn die Koordinatenlinien körperfeste Linien sind, die allen Bewegungen und Deformationen des Körpers folgen. Bildlich kann man sich ein Koordinatennetz auf eine Gummihaut aufgemalt denken, die dann gedehnt wird und das Koordinatennetz mitnimmt, siehe Abbildung rechts.
Praktische Bedeutung haben konvektive Koordinatensysteme in der Kinematik schlanker Strukturen (Stäbe, Balken) und dünnwandiger Strukturen (Schalen und Membranen), wo die Spannungen und Dehnungen parallel zu den Vorzugsrichtungen der Struktur interessieren. Außerdem können materielle Vorzugsrichtungen nicht isotroper Materialien, wie z.B. von Holz, oder Advektions-Diffusions-Probleme (z.B. Schadstoffausbreitung in der Atmosphäre oder im Grundwasser) in konvektiven Koordinaten beschrieben werden. In der Kinematik deformierbarer Körper bekommen die in der Kontinuumsmechanik benutzten Tensoren in konvektiven Koordinaten ausgedrückt besonders einfache Darstellungen.
Definition
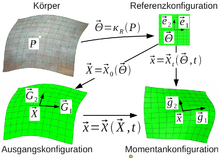
Betrachtet wird ein deformierbarer Körper
wie im Bild, der mittels Konfigurationen
in einen euklidischen
Vektorraum  abgebildet wird. Die konvektiven Koordinaten eines materiellen Punktes
abgebildet wird. Die konvektiven Koordinaten eines materiellen Punktes  werden durch die Referenzkonfiguration
werden durch die Referenzkonfiguration
 zugewiesen. Für jedes Partikel
eines Körpers
zugewiesen. Für jedes Partikel
eines Körpers  sind seine konvektiven Koordinaten gegeben durch:
sind seine konvektiven Koordinaten gegeben durch:

Diese Zuordnung ist vom gewählten Bezugssystem des Beobachters, von der Zeit
und vom physikalischen Raum unserer Anschauung unabhängig. Für den viereckigen
Körper im Bild eignet sich z.B. das Einheitsquadrat ![V_{R}=[0,1]^{2}](/svg/00b88f909d85735ab731459a786387c28857a906.svg) als Bildbereich.
als Bildbereich.  ist ein-eindeutig
(bijektiv), so dass
ist ein-eindeutig
(bijektiv), so dass  auch der Benennung des Partikels
dienen kann. Weil die Koordinaten
an das Partikel gebunden sind, werden sie von jeder Bewegung des Partikels
mitgenommen.
auch der Benennung des Partikels
dienen kann. Weil die Koordinaten
an das Partikel gebunden sind, werden sie von jeder Bewegung des Partikels
mitgenommen.
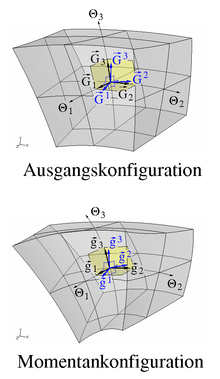
Tangenten- und Gradientenvektoren
 mit Tangentenvektor
mit Tangentenvektor  und Gradientenvektor
und Gradientenvektor  im Punkt
im Punkt 
 und
und  an materielle Koordinatenlinien (schwarz) in der Ausgangs- bzw.
Momentankonfiguration spannen Tangentialräume (gelb) auf. Die kontravarianten
Basisvektoren
an materielle Koordinatenlinien (schwarz) in der Ausgangs- bzw.
Momentankonfiguration spannen Tangentialräume (gelb) auf. Die kontravarianten
Basisvektoren  und
und  spannen Kotangentialräume auf (nicht dargestellt)
spannen Kotangentialräume auf (nicht dargestellt)Die Bewegungsfunktion  beschreibt die Bewegung des Partikels
durch den Raum unserer Anschauung und liefert uns ein Objekt unserer Anschauung,
weil diese Positionen vom Körper einmal eingenommen wurden. Die Bewegung startet
zu einem bestimmten Zeitpunkt
beschreibt die Bewegung des Partikels
durch den Raum unserer Anschauung und liefert uns ein Objekt unserer Anschauung,
weil diese Positionen vom Körper einmal eingenommen wurden. Die Bewegung startet
zu einem bestimmten Zeitpunkt  ,
in dem sich der Körper in der Ausgangskonfiguration befindet. Die Funktion
,
in dem sich der Körper in der Ausgangskonfiguration befindet. Die Funktion

ordnet den Koordinaten
ein-eindeutig (bijektiv) einen Punkt
im Raum zu, den das Partikel zum Zeitpunkt
eingenommen hat. Der Vektor
hat materielle Koordinaten  bezüglich der Standardbasis
bezüglich der Standardbasis
 .
Wegen der Bijektivität kann
.
Wegen der Bijektivität kann

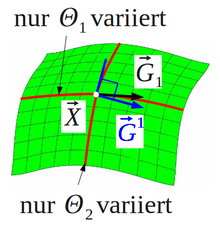
geschrieben werden. Variiert im Vektor
nur eine Koordinate  ,
dann fährt
,
dann fährt  eine materielle Koordinatenlinie
ab, die im allgemeinen Fall eine Kurve im Raum ist, siehe obere Abbildung
rechts. Die Tangentenvektoren
eine materielle Koordinatenlinie
ab, die im allgemeinen Fall eine Kurve im Raum ist, siehe obere Abbildung
rechts. Die Tangentenvektoren

an diese Kurven werden kovariante
Basisvektoren des krummlinigen Koordinatensystems genannt. Die Richtung, in der
sich die Koordinate
am stärksten ändert, sind die Gradienten

die die kontravarianten
Basisvektoren  in einem materiellen Punkt darstellen. Wegen
in einem materiellen Punkt darstellen. Wegen

sind die ko- und kontravarianten Basisvektoren dual zueinander und die kontravarianten Basisvektoren können aus

berechnet werden. Darin wurde das dyadische
Produkt " "
benutzt.
"
benutzt.
Der zwischen der Referenzkonfiguration und der Ausgangskonfiguration
arbeitende Deformationsgradient
J enthält die kovarianten Basisvektoren  in den Spalten und die kontravarianten Basisvektoren
finden sich in den Zeilen seiner Inversen
in den Spalten und die kontravarianten Basisvektoren
finden sich in den Zeilen seiner Inversen
 .
.
Die ko- und kontravarianten Basisvektoren werden nur lokal (in den Tangentialräumen) im
Punkt
als Basissystem für Vektor- und Tensorfelder, nicht aber für Ortsvektoren,
benutzt: Die kovarianten Basisvektoren
bilden eine Basis des Tangentialraumes  und die kontravarianten Basisvektoren
bilden eine Basis des Kotangentialraumes
und die kontravarianten Basisvektoren
bilden eine Basis des Kotangentialraumes
 im Punkt ,
siehe untere Abbildung rechts.
im Punkt ,
siehe untere Abbildung rechts.
Im Zuge der Bewegung entsteht in jedem Punkt und zu jedem Zeitpunkt  einen Satz kovarianter Basisvektoren
einen Satz kovarianter Basisvektoren  und kontravarianter Basisvektoren
und kontravarianter Basisvektoren  ,
die die Tangenten bzw. Gradienten der materiellen Koordinatenlinien im
deformierten Körper zur Zeit
,
die die Tangenten bzw. Gradienten der materiellen Koordinatenlinien im
deformierten Körper zur Zeit  sind. Sie sind mithin Basen der Tangentialräume
sind. Sie sind mithin Basen der Tangentialräume  bzw.
bzw.  .
.
Differentialoperatoren und Nabla-Operator
Die Differentialoperatoren Gradient
(grad), Divergenz
(div) und Rotation
(rot) aus der Vektoranalysis
können mit dem Nabla-Operator  definiert werden. In konvektiven Koordinaten hat der Nabla-Operator in der Lagrange’schen
Darstellung die Form:
definiert werden. In konvektiven Koordinaten hat der Nabla-Operator in der Lagrange’schen
Darstellung die Form:

Die Gradienten von Skalar- und Vektorfeldern werden mit ihm wie folgt dargestellt [1]:
| Skalarfeld | 
|
|---|---|
| Vektorfeld | 
|
Die Divergenzen werden aus dem Skalarprodukt mit  erhalten[1]:
erhalten[1]:
| Vektorfeld | 
|
|---|---|
| Tensorfeld | 
|
Der Operator Sp bildet die Spur. Die Rotation eines Vektorfeldes entsteht mit dem Kreuzprodukt:

Entsprechende Operatoren  ,
,
 und
und  für Felder in der Euler’schen
Darstellung liefert der Nabla-Operator
für Felder in der Euler’schen
Darstellung liefert der Nabla-Operator

Der Einheitstensor
Der Einheitstensor  bildet jeden Vektor auf sich selbst ab. Bezüglich der ko- und kontravarianten
Basisvektoren lauten seine Darstellungen:
bildet jeden Vektor auf sich selbst ab. Bezüglich der ko- und kontravarianten
Basisvektoren lauten seine Darstellungen:

Die Skalarprodukte der kovarianten Basisvektoren

heißen kovariante Metrikkoeffizienten (des Tangentialraumes ).
Entsprechend sind die Skalarprodukte der kontravarianten Basisvektoren

kontravariante Metrikkoeffizienten (des Kotangentialraumes ).
In der Euler’schen Betrachtungsweise ist entsprechend

mit den ko- und kontravarianten Metrikkoeffizienten  bzw.
bzw.  (des Tangentialraumes
bzw. Kotangentialraumes ).
(des Tangentialraumes
bzw. Kotangentialraumes ).
Deformationsgradient
In konvektiven Koordinaten ausgedrückt bekommt der Deformationsgradient  eine besonders einfache Form. Der Deformationsgradient bildet gemäß seiner
Definition die Tangentenvektoren an materielle Linien in der
Ausgangskonfiguration auf die in der Momentankonfiguration ab und diese
Tangentenvektoren sind gerade die kovarianten Basisvektoren
bzw. .
Also ist
eine besonders einfache Form. Der Deformationsgradient bildet gemäß seiner
Definition die Tangentenvektoren an materielle Linien in der
Ausgangskonfiguration auf die in der Momentankonfiguration ab und diese
Tangentenvektoren sind gerade die kovarianten Basisvektoren
bzw. .
Also ist

Das ergibt sich auch aus der Ableitung der
Bewegungsfunktion  :
:

In dieser Darstellung lässt sich auch sofort mit

die Inverse des Deformationsgradienten angeben. Der transponiert inverse Deformationensgradient bildet die kontravarianten Basisvektoren aufeinander ab:

Räumlicher Geschwindigkeitsgradient
Die materielle Zeitableitung des Deformationsgradienten ist der materielle Geschwindigkeitsgradient

denn die Ausgangskonfiguration hängt nicht von der Zeit ab und das gilt dann
auch für die Basisvektoren
und .
Der räumliche Geschwindigkeitsgradient  bekommt in konvektiven Koordinaten die einfache Form
bekommt in konvektiven Koordinaten die einfache Form

worin  die Geschwindigkeit eines Partikels am Ort
die Geschwindigkeit eines Partikels am Ort  zur Zeit
ist. Der räumliche Geschwindigkeitsgradient transformiert die Basisvektoren in
ihre Raten:
zur Zeit
ist. Der räumliche Geschwindigkeitsgradient transformiert die Basisvektoren in
ihre Raten:
 und
und 
Streck-, Verzerrungs- und Spannungstensoren
Die folgenden Tensoren treten in der Kontinuumsmechanik auf. Ihre Darstellung in konvektiven Koordinaten ist in der Tabelle zusammengestellt.
| Name | Darstellung in konvektiven Koordinaten |
|---|---|
| Deformationsgradient | 
|
| Rechter Cauchy-Green Tensor | 
|
| Linker Cauchy-Green Tensor | 
|
| Green-Lagrange-Verzerrungstensor |  mit
mit 
|
| Euler-Almansi- Verzerrungstensor | 
|
| Räumlicher Geschwindigkeitsgradient | 
|
| Räumlicher Verzerrungsgeschwindigkeitstensor | 
|
| Cauchy’scher Spannungstensor | 
|
| Gewichteter Cauchy’scher Spannungstensor | 
|
| Nennspannungstensor | 
|
| Erster Piola-Kirchoff’scher Spannungstensor | 
|
| Zweiter Piola-Kirchoff’scher Spannungstensor | 
|
Weil der rechte Cauchy-Green Tensor  ,
der Green-Lagrange-Verzerrungstensor
,
der Green-Lagrange-Verzerrungstensor  und der Euler-Almansi-Tensor
und der Euler-Almansi-Tensor  in ihrer (hier angegebenen) natürlichen Form mit den kovarianten Komponenten
in ihrer (hier angegebenen) natürlichen Form mit den kovarianten Komponenten
 bzw.
bzw.  gebildet werden, werden diese Tensoren üblicherweise als kovariante
Tensoren bezeichnet. Die Spannungstensoren
gebildet werden, werden diese Tensoren üblicherweise als kovariante
Tensoren bezeichnet. Die Spannungstensoren  und
und  sind entsprechend kontravariante Tensoren.
sind entsprechend kontravariante Tensoren.
Objektive Zeitableitungen
Objektive Größen sind solche, die von bewegten Beobachtern in gleicher Weise wahrgenommen werden. Die Zeitableitung von Tensoren ist im Allgemeinen nicht objektiv. Die konvektiven ko- bzw. kontravarianten Oldroyd-Ableitungen objektiver Tensoren sind jedoch objektiv und schreiben sich in konvektiven Koordinaten besonders einfach.
Die Kovariante Oldroyd-Ableitung, z.B. von  lautet
lautet

Die Kontravariante Oldroyd-Ableitung, z.B. von  ,
ergibt sich ähnlich:
,
ergibt sich ähnlich:

Daraus leiten sich auch die Bezeichnungen konvektiv kovariant bzw. konvektiv kontravariant der Oldroyd-Ableitungen ab. Bemerkenswert sind die übereinstimmenden Transformationseigenschaften der kovarianten Tensoren
 und
und 
sowie der kontravarianten Tensoren
 und
und 
Siehe auch den Abschnitt Objektive Zeitableitungen im Artikel zum Geschwindigkeitsgradient.
Beispiel
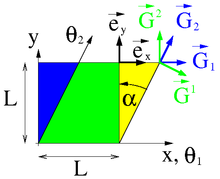
Ein Parallelogramm mit Grundseite und Höhe  und Neigungswinkel
und Neigungswinkel  wird zu einem flächengleichen Quadrat verformt, siehe Bild. Als
Referenzkonfiguration eignet sich das Einheitsquadrat
wird zu einem flächengleichen Quadrat verformt, siehe Bild. Als
Referenzkonfiguration eignet sich das Einheitsquadrat
![{\displaystyle \Theta _{1},\Theta _{2}\in [0,L]^{2}\subset \mathbb {R} ^{2}}](/svg/90187dd399f792fb87bbb0fccf3286e69f17416d.svg)
In der Ausgangskonfiguration haben die Punkte des Parallelogramms die Koordinaten:

Die kovarianten Basisvektoren sind

Sie stehen spaltenweise im Gradient  und die kontravarianten Basisvektoren entspringen den Zeilen der Inversen:
und die kontravarianten Basisvektoren entspringen den Zeilen der Inversen:


In der Momentankonfiguration ist  :
:

und die konvektiven ko- und kontravarianten Basisvektoren bilden die Standardbasis

Der Deformationsgradient

ist ortsunabhängig und hat die Determinante eins, was die Erhaltung des Flächeninhalts differentialgeometrisch nachweist. Die kovarianten Metrikkoeffizienten lauten

Damit kann der Green-Lagrange-Verzerrungstensor berechnet werden:

Siehe auch
Anmerkungen
- ↑ a b In der Literatur kommen auch andere Definitionen vor, siehe den Hauptartikel zum Nabla-Operator.
Literatur
- H. Bertram: Axiomatische Einführung in die Kontinuumsmechanik. Wissenschaftsverlag, 1989, ISBN 3-411-14031-3.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 15.07. 2021