Transportsatz
Transportsätze oder Transport-Theoreme beschreiben die Regeln für die Zeitableitung von Integralen mit zeitabhängigen Integrationsgrenzen. Solche Zeitableitungen kommen in der Kontinuums- und Strömungsmechanik vor, wo die Integrale beispielsweise eine Zirkulation, einen Volumenstrom durch eine Fläche oder den Impuls einer sich bewegenden und deformierenden Masse darstellen. Das Integrationsgebiet kann entsprechend eine Linie, eine Fläche oder ein Volumen sein. Der Transportsatz für Volumen wird Reynolds’scher Transportsatz oder Reynolds-Transport-Theorem (nach Osborne Reynolds) genannt. Die Transportsätze werden verwendet, um grundlegende Erhaltungssätze der Kontinuumsmechanik herzuleiten. Mathematisch gesehen handelt es sich um Verallgemeinerungen der Leibnizregel für Parameterintegrale.
Alle betrachteten Felder müssen sowohl nach der Zeit als auch nach dem Ort einmal stetig differenzierbar und im betrachteten Gebiet integrierbar sein. Unstetigkeitsstellen in Form von nach dem Ort stetig differenzierbaren Flächen, an denen sich beispielsweise die Dichte sprunghaft ändert, können jedoch berücksichtigt werden. Bei der Herleitung der Transportsätze werden die Integrationsgrenzen zeitunabhängig dargestellt, der Integrand zeitlich abgeleitet und das Integrationsgebiet wieder in die zeitabhängige Form zurückgebracht.
Linien-, Flächen- und Volumenelemente für von der Masse transportierte Gebiete
Wenn die Gebiete sich mit der Masse mitbewegen, sie also materielle Grenzen aufweisen, dann kann die örtliche Differenzierbarkeit der Bewegungsfunktion der Masse ausgenutzt werden. Die substantielle Ableitung der Linien-, Flächen- und Volumenelemente sind dann gemäß der folgenden Tabelle gegeben.
| Linienelement |  |
| Vektorielles Oberflächenelement | ![{\displaystyle {\frac {\mathrm {D} }{\mathrm {D} t}}\,\mathrm {d} {\vec {a}}=[\operatorname {div} ({\vec {v}})\mathbf {I} -\operatorname {grad} ({\vec {v}})^{\top }]\cdot \,\mathrm {d} {\vec {a}}}](/svg/d07ebf2fdbb5ecfbff4123e421ca44cb14c32b6c.svg) |
| Volumenelement |  |
Der Operator  oder ein Hochpunkt
wie in
oder ein Hochpunkt
wie in  bezeichnet die substantielle Zeitableitung,
bezeichnet die substantielle Zeitableitung,  das vom Ort
das vom Ort  und der Zeit t abhängige Geschwindigkeitsfeld der Masse, grad den Gradienten und
div die Divergenz
eines Vektorfeldes, I den Einheitstensor
und das hochgestellte T die Transposition.
und der Zeit t abhängige Geschwindigkeitsfeld der Masse, grad den Gradienten und
div die Divergenz
eines Vektorfeldes, I den Einheitstensor
und das hochgestellte T die Transposition.
Wenn sich das Integrationsgebiet relativ zur Masse bewegt, dann können die oben angegebenen Linien- und Oberflächenelemente nicht berechnet werden, weil in den Gebieten die für die Gradienten- und Divergenzbildung benötigte Umgebung fehlt. Statt auf die Lagrangesche Betrachtungsweise der Integrale zurückzugreifen, die materielle Integrationsgrenzen zeitunabhängig zu definieren gestattet, wird das Gebiet mit Parametern aus einem festen Intervall – hier [0,1]n, n=1,2,3 je nach Dimension n des Gebietes – beschrieben. Auch diese festen Grenzen erlauben es, die Zeitableitung in den Integranden zu verschieben.
Transportsatz für Linienintegrale
Gegeben sei eine sich durch die Masse bewegende Kurve b mit vektoriellem Linienelement
 Für die Kurve liege zu jeder Zeit t eine Parameterdarstellung
Für die Kurve liege zu jeder Zeit t eine Parameterdarstellung  für die Punkte auf der Kurve mit Kurvenparameter ξ im Intervall [0,1] vor. Für
das Linienelement gilt dann:
für die Punkte auf der Kurve mit Kurvenparameter ξ im Intervall [0,1] vor. Für
das Linienelement gilt dann:  Die Zeitableitung des Kurvenintegrals einer vom Ort
und der Zeit t abhängigen Feldgröße
Die Zeitableitung des Kurvenintegrals einer vom Ort
und der Zeit t abhängigen Feldgröße  über den Weg b lautet dann:[1]
über den Weg b lautet dann:[1]
![{\displaystyle {\begin{aligned}{\frac {\mathrm {d} }{\mathrm {d} t}}\int _{b}{\vec {f}}({\vec {b}},t)\cdot \,\mathrm {d} {\vec {b}}=&{\frac {\mathrm {d} }{\mathrm {d} t}}\int _{0}^{1}{\vec {f}}({\vec {b}}(\xi ,t),t)\cdot {\frac {\partial }{\partial \xi }}{\vec {b}}(\xi ,t)\,\mathrm {d} \xi =\int _{0}^{1}\left[\left({\frac {\partial {\vec {f}}}{\partial {\vec {x}}}}\cdot {\frac {\partial {\vec {b}}}{\partial t}}\right)\cdot {\frac {\partial {\vec {b}}}{\partial \xi }}+{\frac {\partial {\vec {f}}}{\partial t}}\cdot {\frac {\partial {\vec {b}}}{\partial \xi }}+{\vec {f}}\cdot {\frac {\partial ^{2}{\vec {b}}}{\partial \xi \partial t}}\right]\,\mathrm {d} \xi \\=&\int _{b}\left[{\frac {\partial {\vec {f}}}{\partial t}}+\operatorname {grad} ({\vec {f}})\cdot {\vec {v}}_{b}\right]\cdot \,\mathrm {d} {\vec {b}}+\int _{0}^{1}{\vec {f}}\cdot {\frac {\partial }{\partial \xi }}{\vec {v}}_{b}(\xi ,t)\,\mathrm {d} \xi \,.\end{aligned}}}](/svg/ac38f88879fd857788ce4961ab35d7a44ac13b48.svg)
Für ein Skalarfeld gilt entsprechend:
![{\displaystyle {\frac {\mathrm {d} }{\mathrm {d} t}}\int _{b}f({\vec {b}},t)\,\mathrm {d} {\vec {b}}=\int _{b}\left[{\frac {\partial f}{\partial t}}+\operatorname {grad} (f)\cdot {\vec {v}}_{b}\right]\,\mathrm {d} {\vec {b}}+\int _{0}^{1}f{\frac {\partial }{\partial \xi }}{\vec {v}}_{b}(\xi ,t)\,\mathrm {d} \xi \,.}](/svg/72f4a73c878d224d12bb82dff185ecc7ba4b1ab7.svg)
Wenn die Geschwindigkeit der Kurve  gleich der Geschwindigkeit
gleich der Geschwindigkeit  der Masse ist, dann steht in der eckigen Klammer die substantielle Zeitableitung
der Feldgröße und die Ableitung der Geschwindigkeit in Richtung der Kurve kann
mit dem Geschwindigkeitsgradient berechnet werden:[1]
der Masse ist, dann steht in der eckigen Klammer die substantielle Zeitableitung
der Feldgröße und die Ableitung der Geschwindigkeit in Richtung der Kurve kann
mit dem Geschwindigkeitsgradient berechnet werden:[1]

Dann geht dieser Transportsatz in den für von der Masse transportierte Linien aus der Tabelle über.
| Skalarfeld | ![{\displaystyle {\frac {\mathrm {D} }{\mathrm {D} t}}\oint _{b}f\,\mathrm {d} {\vec {b}}=\oint _{b}\left({\frac {\mathrm {D} }{\mathrm {D} t}}f\,\mathrm {d} {\vec {b}}+f{\frac {\mathrm {D} }{\mathrm {D} t}}\,\mathrm {d} {\vec {b}}\right)=\oint _{b}[{\dot {f}}\mathbf {I} +f\operatorname {grad} ({\vec {v}})]\cdot \,\mathrm {d} {\vec {b}}}](/svg/01c5ba9ce31c2d72651df7da3197401ed78e55d7.svg) |
| Vektorfeld | ![{\displaystyle {\frac {\mathrm {D} }{\mathrm {D} t}}\oint _{b}{\vec {f}}\cdot \,\mathrm {d} {\vec {b}}=\oint _{b}\left({\frac {\mathrm {D} }{\mathrm {D} t}}{\vec {f}}\cdot \,\mathrm {d} {\vec {b}}+{\vec {f}}\cdot {\frac {\mathrm {D} }{\mathrm {D} t}}\,\mathrm {d} {\vec {b}}\right)=\oint _{b}[{\dot {\vec {f}}}+{\vec {f}}\cdot \operatorname {grad} ({\vec {v}})]\cdot \,\mathrm {d} {\vec {b}}}](/svg/b06c0bb48b335da42eeb8c061f6f1092d6d89ece.svg) |
Transportsatz für Flächenintegrale
Gegeben sei eine Fläche a mit vektoriellem Oberflächenelement
 die sich durch die Masse bewegt. Für die Fläche liege zu jeder Zeit t eine
Parameterdarstellung
die sich durch die Masse bewegt. Für die Fläche liege zu jeder Zeit t eine
Parameterdarstellung  für die Punkte auf der Fläche mit Flächenparametern (ξ,η) aus dem
Einheitsquadrat [0,1]² vor. Das vektorielle Oberflächenelement berechnet sich
dann mit dem Kreuzprodukt
zu:
für die Punkte auf der Fläche mit Flächenparametern (ξ,η) aus dem
Einheitsquadrat [0,1]² vor. Das vektorielle Oberflächenelement berechnet sich
dann mit dem Kreuzprodukt
zu:

Die Zeitableitung des Flächenintegrals einer vom Ort
und der Zeit t abhängigen Feldgröße
über der Fläche a lautet dann:[1]
![{\displaystyle {\begin{aligned}{\frac {\mathrm {d} }{\mathrm {d} t}}\int _{a}{\vec {f}}({\vec {a}},t)\cdot \,\mathrm {d} {\vec {a}}=&{\frac {\mathrm {d} }{\mathrm {d} t}}\int _{0}^{1}\int _{0}^{1}{\vec {f}}({\vec {a}}(\xi ,\eta ,t),t)\cdot \left({\frac {\partial {\vec {a}}}{\partial \xi }}\times {\frac {\partial {\vec {a}}}{\partial \eta }}\right)\,\mathrm {d} \xi \,\mathrm {d} \eta \\=&\int _{0}^{1}\int _{0}^{1}\left[\left({\frac {\partial {\vec {f}}}{\partial {\vec {x}}}}\cdot {\frac {\partial {\vec {a}}}{\partial t}}\right)\cdot \left({\frac {\partial {\vec {a}}}{\partial \xi }}\times {\frac {\partial {\vec {a}}}{\partial \eta }}\right)+{\frac {\partial {\vec {f}}}{\partial t}}\cdot \left({\frac {\partial {\vec {a}}}{\partial \xi }}\times {\frac {\partial {\vec {a}}}{\partial \eta }}\right)+{\vec {f}}\cdot {\frac {\partial }{\partial t}}\left({\frac {\partial {\vec {a}}}{\partial \xi }}\times {\frac {\partial {\vec {a}}}{\partial \eta }}\right)\right]\,\mathrm {d} \xi \,\mathrm {d} \eta \\=&\int _{a}\left[{\frac {\partial {\vec {f}}}{\partial t}}+\operatorname {grad} ({\vec {f}})\cdot {\vec {v}}_{a}\right]\cdot \,\mathrm {d} {\vec {a}}+\int _{0}^{1}\int _{0}^{1}{\vec {f}}\cdot \left({\frac {\partial {\vec {v}}_{a}}{\partial \xi }}\times {\frac {\partial {\vec {a}}}{\partial \eta }}+{\frac {\partial {\vec {a}}}{\partial \xi }}\times {\frac {\partial {\vec {v}}_{a}}{\partial \eta }}\right)\,\mathrm {d} \xi \,\mathrm {d} \eta \,.\end{aligned}}}](/svg/ddd15d560e4b822f400e6ab7bc173964b4db7ad5.svg)
Für ein Skalarfeld gilt entsprechend:
![{\displaystyle {\frac {\mathrm {d} }{\mathrm {d} t}}\int _{a}f({\vec {a}},t)\cdot \,\mathrm {d} {\vec {a}}=\int _{a}\left[{\frac {\partial f}{\partial t}}+\operatorname {grad} (f)\cdot {\vec {v}}_{a}\right]\,\mathrm {d} {\vec {a}}+\int _{0}^{1}\int _{0}^{1}f\cdot \left({\frac {\partial {\vec {v}}_{a}}{\partial \xi }}\times {\frac {\partial {\vec {a}}}{\partial \eta }}+{\frac {\partial {\vec {a}}}{\partial \xi }}\times {\frac {\partial {\vec {v}}_{a}}{\partial \eta }}\right)\,\mathrm {d} \xi \,\mathrm {d} \eta \,.}](/svg/6d77342e98251f6cc8e1be076a84b49de00c09c0.svg)
Wenn die Geschwindigkeit der Fläche  gleich der Geschwindigkeit
der Masse ist, dann steht in der eckigen Klammer die substantielle Zeitableitung
der Feldgröße und dieser Transportsatz geht in den für von der Masse
transportierte Flächen aus der Tabelle über.
gleich der Geschwindigkeit
der Masse ist, dann steht in der eckigen Klammer die substantielle Zeitableitung
der Feldgröße und dieser Transportsatz geht in den für von der Masse
transportierte Flächen aus der Tabelle über.
| Skalarfeld | ![{\displaystyle {\frac {\mathrm {D} }{\mathrm {D} t}}\int _{a}f\,\mathrm {d} {\vec {a}}=\int _{a}\left({\frac {\mathrm {D} }{\mathrm {D} t}}f\,\mathrm {d} {\vec {a}}+f{\frac {\mathrm {D} }{\mathrm {D} t}}\,\mathrm {d} {\vec {a}}\right)=\int _{a}[{\dot {f}}\mathbf {I} +f\operatorname {div} ({\vec {v}})\mathbf {I} -f\operatorname {grad} ({\vec {v}})^{\top }]\cdot \,\mathrm {d} {\vec {a}}}](/svg/3c51de31fee8c5673f0f52d637c159e7e137a78b.svg) |
| Vektorfeld | ![{\displaystyle {\frac {\mathrm {D} }{\mathrm {D} t}}\int _{a}{\vec {f}}\cdot \,\mathrm {d} {\vec {a}}=\int _{a}\left({\frac {\mathrm {D} }{\mathrm {D} t}}{\vec {f}}\cdot \,\mathrm {d} {\vec {a}}+{\vec {f}}\cdot {\frac {\mathrm {D} }{\mathrm {D} t}}\,\mathrm {d} {\vec {a}}\right)=\int _{a}[{\dot {\vec {f}}}+{\vec {f}}\operatorname {div} ({\vec {v}})-{\vec {f}}\cdot \operatorname {grad} ({\vec {v}})^{\top }]\cdot \,\mathrm {d} {\vec {a}}}](/svg/6680194f148360deb4d3b868063de835fd83d891.svg) |
| Beweis |
Wenn die Fläche eine materielle Fläche ist, dann gibt es eine
Referenzkonfiguration mit einer zeitunabhängigen Lagrange’schen
Beschreibung der Fläche  die mit einer Bewegungsfunktion
die mit einer Bewegungsfunktion  in die aktuelle Fläche übergeht:
in die aktuelle Fläche übergeht:  Die Tangentenvektoren an die Fläche transformieren sich dann mit dem Deformationsgradient
F ineinander, z.B.:[1]
Die Tangentenvektoren an die Fläche transformieren sich dann mit dem Deformationsgradient
F ineinander, z.B.:[1]Der im Transportsatz im zweiten Integranden auftauchende Term
vereinfacht sich damit zu: siehe die Berechnung des Kreuzprodukts und des Kofaktors cof mit dem äußeren Tensorprodukt und die Zeitableitung von Linien-, Flächen- und Volumenelementen. Es wurde ausgenutzt, dass in der Lagrange’schen Betrachtungsweise die partielle Zeitableitung gleich der substantiellen Zeitableitung ist. Mit diesem Ergebnis geht der obige Transportsatz in den für von der Masse transportierte Flächen über. |

![{\displaystyle {\begin{aligned}\left({\frac {\partial {\vec {v}}_{a}}{\partial \xi }}\times {\frac {\partial {\vec {a}}}{\partial \eta }}+{\frac {\partial {\vec {a}}}{\partial \xi }}\times {\frac {\partial {\vec {v}}_{a}}{\partial \eta }}\right)\,\mathrm {d} \xi \,\mathrm {d} \eta =&{\frac {\partial }{\partial t}}\left({\frac {\partial {\vec {a}}}{\partial \xi }}\times {\frac {\partial {\vec {a}}}{\partial \eta }}\right)\,\mathrm {d} \xi \,\mathrm {d} \eta ={\frac {\partial }{\partial t}}\left[\left(\mathbf {F} \cdot {\frac {\partial {\vec {A}}}{\partial \xi }}\right)\times \left(\mathbf {F} \cdot {\frac {\partial {\vec {A}}}{\partial \eta }}\right)\right]\,\mathrm {d} \xi \,\mathrm {d} \eta \\=&{\frac {\partial }{\partial t}}\operatorname {cof} (\mathbf {F} )\cdot \left({\frac {\partial {\vec {A}}}{\partial \xi }}\times {\frac {\partial {\vec {A}}}{\partial \eta }}\right)\,\mathrm {d} \xi \,\mathrm {d} \eta ={\frac {\partial }{\partial t}}[\operatorname {det} (\mathbf {F} )\mathbf {F} ^{\top -1}]\cdot \,\mathrm {d} {\vec {A}}={\frac {\mathrm {D} }{\mathrm {D} t}}\,\mathrm {d} {\vec {a}}\,,\end{aligned}}}](/svg/25ede2b599f79c5260c2833d8756a04584c3a7bc.svg)
Reynolds’scher Transportsatz oder Transportsatz für Volumenintegrale
Der Reynolds’sche Transportsatz wird verwendet, um grundlegende Erhaltungssätze der Kontinuumsmechanik herzuleiten. Wird z.B. die Dichte ρ für das Skalarfeld f eingesetzt, dann ergibt sich eine Formulierung für die Massenerhaltung.
Gegeben sei ein Kontrollvolumen Vk mit Volumenelement
dVk und Oberfläche ak mit nach außen gerichtetem,
vektoriellem Oberflächenelement  die sich durch die Masse bewegen. Dann lautet die Zeitableitung des
Volumenintegrals einer vom Ort
und der Zeit t abhängigen Feldgröße
über das Kontrollvolumen, oder kurz der Reynolds’sche Transportsatz:
die sich durch die Masse bewegen. Dann lautet die Zeitableitung des
Volumenintegrals einer vom Ort
und der Zeit t abhängigen Feldgröße
über das Kontrollvolumen, oder kurz der Reynolds’sche Transportsatz:
| Skalarfeld |  |
| Vektorfeld |  |
Das Volumen V wird hier wie im Folgenden groß geschrieben, um eine
Verwechslung mit der Geschwindigkeit
zu vermeiden.
Der Reynolds’sche Transportsatz kann wie folgt interpretiert werden: Die
zeitliche Änderung des Inhalts einer Feldgröße in einem variablen
Kontrollvolumen setzt sich aus einem lokalen und einem konvektiven Anteil
zusammen. Der lokale Anteil besteht aus dem Integral über die lokale
Zeitableitung, die mit der partiellen
Ableitung gebildet wird, und der konvektive Anteil bestimmt sich aus dem
Transport der Feldgröße über die Grenze ak des Kontrollvolumens. Mit
 ist
ist  die Übergangsmenge pro Zeit- und Flächeneinheit.
die Übergangsmenge pro Zeit- und Flächeneinheit.
| Beweis |
Für die Raumpunkte im Volumen liege zu jeder Zeit t eine eineindeutige
Parameterdarstellung  mit Parametern
mit Parametern ![{\displaystyle {\vec {\Theta }}\in [0,1]^{3}}](/svg/af32f06361191931733f79910a4b6bf5882e9fbd.svg) vor. Das Volumenelement berechnet sich dann mit dem Spatprodukt zu:[1]
vor. Das Volumenelement berechnet sich dann mit dem Spatprodukt zu:[1]
|

 berechnet sich wie eine
berechnet sich wie eine ![{\displaystyle {\begin{aligned}{\frac {\mathrm {d} }{\mathrm {d} t}}\int _{V_{k}}{\vec {f}}({\vec {x}},t)\,\mathrm {d} V_{k}=&{\frac {\mathrm {d} }{\mathrm {d} t}}\int _{0}^{1}\int _{0}^{1}\int _{0}^{1}{\vec {f}}({\vec {x}}({\vec {\Theta }},t),t)\cdot \operatorname {det} (\mathbf {J} )\,\mathrm {d} \Omega \\=&\int _{0}^{1}\int _{0}^{1}\int _{0}^{1}\left[{\frac {\partial {\vec {f}}}{\partial {\vec {x}}}}\cdot {\frac {\partial {\vec {x}}}{\partial t}}\operatorname {det} (\mathbf {J} )+{\frac {\partial {\vec {f}}}{\partial t}}\operatorname {det} (\mathbf {J} )+{\vec {f}}\cdot \operatorname {det} (\mathbf {J} )\left(\mathbf {J} ^{\top -1}:{\frac {\partial \mathbf {J} }{\partial t}}\right)\right]\,\mathrm {d} \Omega \\=&\int _{V_{k}}\left[{\frac {\partial {\vec {f}}}{\partial t}}+\operatorname {grad} ({\vec {f}})\cdot {\vec {v}}_{k}+{\vec {f}}\operatorname {div} ({\vec {v}}_{k})\right]\,\mathrm {d} V_{k}\,,\end{aligned}}}](/svg/589d588c4c986dd089d19fd3c4f95e723154bba9.svg)
 und
und
 Ferner ist die
Ferner ist die ![{\displaystyle {\frac {\mathrm {d} }{\mathrm {d} t}}\int _{V_{k}}f({\vec {x}},t)\,\mathrm {d} V_{k}=\int _{V_{k}}\left[{\frac {\partial f}{\partial t}}+\operatorname {grad} (f)\cdot {\vec {v}}_{k}+f\operatorname {div} ({\vec {v}}_{k})\right]\,\mathrm {d} V_{k}\,.}](/svg/b6e1af0e451b98c8831ca0c15bc48ebf33a0946b.svg)


 “
bildet das
“
bildet das  für Tensoren vor, der die Divergenz der Zeilen des Tensors bildet und
nicht – wie hier – der Spalten. Mit dem Operator gilt:
für Tensoren vor, der die Divergenz der Zeilen des Tensors bildet und
nicht – wie hier – der Spalten. Mit dem Operator gilt:
Wenn die Geschwindigkeit  des Kontrollvolumens gleich der Geschwindigkeit
der Masse ist (kein Ein- und Ausfluss von Materie), dann geht dieser
Transportsatz in den für von der Masse transportierte Volumen aus der Tabelle
über.
des Kontrollvolumens gleich der Geschwindigkeit
der Masse ist (kein Ein- und Ausfluss von Materie), dann geht dieser
Transportsatz in den für von der Masse transportierte Volumen aus der Tabelle
über.
| Skalarfeld | ![{\displaystyle {\frac {\mathrm {D} }{\mathrm {D} t}}\int _{V}f\,\mathrm {d} V=\int _{V}\left({\frac {\mathrm {D} }{\mathrm {D} t}}f\,\mathrm {d} V+f{\frac {\mathrm {D} }{\mathrm {D} t}}\,\mathrm {d} V\right)=\int _{V}[{\dot {f}}+f\operatorname {div} ({\vec {v}})]\,\mathrm {d} V=\int _{V}{\frac {\partial f}{\partial t}}\,\mathrm {d} V+\int _{a}f{\vec {v}}\cdot \,\mathrm {d} {\vec {a}}}](/svg/14f53e4f5b68b1c62cd0e6d4a36c9ce5c7203878.svg) |
| Vektorfeld | ![{\displaystyle {\frac {\mathrm {D} }{\mathrm {D} t}}\int _{V}{\vec {f}}\,\mathrm {d} V=\int _{V}\left({\frac {\mathrm {D} }{\mathrm {D} t}}{\vec {f}}\cdot \,\mathrm {d} V+{\vec {f}}\cdot {\frac {\mathrm {D} }{\mathrm {D} t}}\,\mathrm {d} V\right)=\int _{V}[{\dot {\vec {f}}}+{\vec {f}}\operatorname {div} ({\vec {v}})]\,\mathrm {d} V=\int _{V}{\frac {\partial {\vec {f}}}{\partial t}}\,\mathrm {d} V+\int _{a}{\vec {f}}({\vec {v}}\cdot \,\mathrm {d} {\vec {a}})}](/svg/59bb6d810abf45c46ca5a3569c197cf9f5f117d5.svg) |
Dies ist der Reynolds’sche Transportsatz spezialisiert auf von Massen
mitgeführten Volumina V. Hier ist a die Oberfläche der Masse mit nach außen
gerichtetem, vektoriellem Oberflächenelement 
Wenn die Grenzen des Kontrollvolumens und der Masse zu einem Zeitpunkt übereinstimmen, dann kann aus dem allgemeinen Reynolds’schen Transportsatz und der spezialisieren, letzteren Version der lokale Anteil eliminiert werden:
| Skalarfeld |  |
| Vektorfeld | ![{\displaystyle {\frac {\mathrm {D} }{\mathrm {D} t}}\int _{V}{\vec {f}}\,\mathrm {d} V={\frac {\mathrm {d} }{\mathrm {d} t}}\int _{V_{k}}{\vec {f}}\,\mathrm {d} V_{k}+\int _{a_{k}}{\vec {f}}\;[({\vec {v}}-{\vec {v}}_{k})\cdot \,\mathrm {d} {\vec {a}}_{k}]}](/svg/68bcdebeafa8aefd304807490c3ba2f45a55459a.svg) |
Die materielle Zeitableitung des Inhalts einer Feldgröße in einem Volumen ist
demnach gleich der zeitlichen Änderung im zeitabhängigen Volumen Vk
und dem Transport über die wandernde Fläche ak mit einer
Durchflussmenge, die von der Geschwindigkeitsdifferenz  zwischen den Partikeln der Masse und der Fläche ak in Richtung der
Flächennormalen bestimmt ist.
zwischen den Partikeln der Masse und der Fläche ak in Richtung der
Flächennormalen bestimmt ist.
Einfluss von Sprungstellen
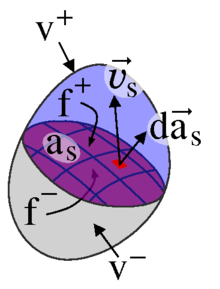
Die eingangs verlangte örtliche stetige Differenzierbarkeit des transportierten Feldes wird unter realen Verhältnissen verletzt, wenn beispielsweise Dichtesprünge an Materialgrenzen oder Stoßwellen auftreten. Solche flächigen Sprungstellen können jedoch im Transportsatz berücksichtigt werden, wenn die Fläche selbst örtlich stetig differenzierbar ist und so in jedem ihrer Punkte einen Normalenvektor besitzt. Die Fläche – im folgenden Sprungstelle genannt – muss keine materielle Fläche sein, kann sich also mit einer anderen Geschwindigkeit bewegen als die Masse selbst. Durch diese Fläche wird die Masse in zwei Stücke V+ und V− geteilt und es wird vereinbart, dass der Normalenvektor der Sprungstelle as in Richtung der Sprungstellengeschwindigkeit und das Volumen V+ weise, siehe Bild rechts.
Dann ergibt sich der Transportsatz für Fälle mit Sprungstelle aus der Tabelle.
| Skalarfeld | ![{\displaystyle {\frac {\mathrm {D} }{\mathrm {D} t}}\int _{V}f\,\mathrm {d} V=\int _{V}{\frac {\partial f}{\partial t}}\,\mathrm {d} V+\int _{a}f\;({\vec {v}}\cdot \,\mathrm {d} {\vec {a}})-\int _{a_{s}}[[f\;(({\vec {v}}-{\vec {v}}_{s})\cdot {\vec {n}})]]\mathrm {d} a_{s}}](/svg/05f14b247cbdb58ef801d14fa8810ce97b124805.svg) |
| Vektorfeld | ![{\displaystyle {\frac {\mathrm {D} }{\mathrm {D} t}}\int _{V}{\vec {f}}\,\mathrm {d} V=\int _{V}{\frac {\partial {\vec {f}}}{\partial t}}\,\mathrm {d} V+\int _{a}{\vec {f}}\;({\vec {v}}\cdot \,\mathrm {d} {\vec {a}})-\int _{a_{s}}[[{\vec {f}}\;(({\vec {v}}-{\vec {v}}_{s})\cdot {\vec {n}})]]\mathrm {d} a_{s}}](/svg/59a15f4f69ce210f03051af7bfdd0aa091adb935.svg) |
Der neu hinzugekommene letzte Term integriert die Sprungfunktion über die Sprungstelle, beispielsweise:
![{\displaystyle [[f\;(({\vec {v}}-{\vec {v}}_{s})\cdot {\vec {n}})]]:=f^{+}\;(({\vec {v}}^{+}-{\vec {v}}_{s})\cdot {\vec {n}})-f^{-}\;(({\vec {v}}^{-}-{\vec {v}}_{s})\cdot {\vec {n}})\,.}](/svg/455e9e3403584ff73d5dba9896dfbfa267cdfdd3.svg)
Die Größe f+ ist der Wert des interessierenden Felds bei
Annäherung an die Sprungstelle in V+, f− ist die Größe bei
Annäherung an die Sprungstelle in V− und so macht das Feld auf der
Fläche as den Sprung [[f]]:=f+ - f−. Gleiches
gilt für die Geschwindigkeit, die beispielsweise bei einer Stoßwelle auf beiden
Seiten der Sprungstelle verschieden sein kann. Die
Sprungstellengeschwindigkeit  und die Normale
und die Normale  an die Sprungstelle – definiert mit
an die Sprungstelle – definiert mit  – sind auf beiden Seiten der Sprungstelle identisch. Das Minuszeichen vor dem
letzten Integral geht aus der Vereinbarung hervor, dass die Normale an die
Sprungstelle und die Sprungstellengeschwindigkeit in das Volumen V+
weisen.
– sind auf beiden Seiten der Sprungstelle identisch. Das Minuszeichen vor dem
letzten Integral geht aus der Vereinbarung hervor, dass die Normale an die
Sprungstelle und die Sprungstellengeschwindigkeit in das Volumen V+
weisen.
| Beweis |
| Gegeben ist eine örtlich stetig differenzierbare Fläche as,
die sich mit der ihr eigenen Sprungstellengeschwindigkeit
durch die Masse hindurch bewegt, siehe Bild. Die Oberfläche des gesamten
Kontrollvolumens V (die innere Fläche as zählt nicht dazu)
besteht aus dem zum Volumen V+ gehörenden Teil a+
und dem Komplement a− und bewege sich mit der Masse mit, so
dass die Oberflächen materielle Flächen darstellen. Nur auf der
Sprungstelle habe die Oberfläche der Kontrollvolumina die ihnen eigene
Sprungstellengeschwindigkeit. Anwendung des Reynold’schen Transportsatzes
in der Form
|
![{\displaystyle {\frac {\mathrm {D} }{\mathrm {D} t}}\int _{V}{\vec {f}}\,\mathrm {d} V={\frac {\mathrm {d} }{\mathrm {d} t}}\int _{V_{k}}{\vec {f}}\,\mathrm {d} V_{k}+\int _{a_{k}}{\vec {f}}[({\vec {v}}-{\vec {v}}_{k})\cdot \,\mathrm {d} {\vec {a}}_{k}]}](/svg/6554aa72bd2fc11298dc8d420bcca9843aab198e.svg)
![{\displaystyle {\begin{aligned}{\frac {\mathrm {D} }{\mathrm {D} t}}\int _{V^{+}}{\vec {f}}\,\mathrm {d} {V^{+}}=&{\frac {\mathrm {d} }{\mathrm {d} t}}\int _{V_{k}^{+}}{\vec {f}}\,\mathrm {d} V_{k}^{+}+\int _{a_{k}^{+}}{\vec {f}}[(\underbrace {{\vec {v}}-{\vec {v}}_{k}^{+}} _{={\vec {0}}})\cdot \,\mathrm {d} {\vec {a}}_{k}^{+}]-\int _{a_{s}}{\vec {f}}^{+}[({\vec {v}}^{+}-{\vec {v}}_{s})\cdot \,\mathrm {d} {\vec {a}}_{s}]\\{\frac {\mathrm {D} }{\mathrm {D} t}}\int _{V^{-}}{\vec {f}}\,\mathrm {d} {V^{-}}=&{\frac {\mathrm {d} }{\mathrm {d} t}}\int _{V_{k}^{-}}{\vec {f}}\,\mathrm {d} V_{k}^{-}+\int _{a_{k}^{-}}{\vec {f}}[(\overbrace {{\vec {v}}-{\vec {v}}_{k}^{-}} )\cdot \,\mathrm {d} {\vec {a}}_{k}^{-}]+\int _{a_{s}}{\vec {f}}^{-}[({\vec {v}}^{-}-{\vec {v}}_{s})\cdot \,\mathrm {d} {\vec {a}}_{s}]\,,\end{aligned}}}](/svg/4f31de77a83e3ac2ebb404bed9b8aecc9b974438.svg)
Fußnoten
- ↑ a
b
c
d
e
f
g
Die Fréchet-Ableitung
einer Funktion
 nach
nach  ist der beschränkte lineare Operator
ist der beschränkte lineare Operator  der - sofern er existiert - in alle Richtungen
der - sofern er existiert - in alle Richtungen  dem Gâteaux-Differential
entspricht, also
dem Gâteaux-Differential
entspricht, also
 skalar-, vektor- oder tensorwertig aber
und
gleichartig. Dann wird auch
skalar-, vektor- oder tensorwertig aber
und
gleichartig. Dann wird auch




© biancahoegel.de
Datum der letzten Änderung: Jena, den: 15.06. 2020