Komplexer Schubmodul
Der komplexe Schubmodul  beschreibt in der Schwingungsrheometrie
das Verhalten viskoelastischer
Körper bei einer oszillierenden
Scherbelastung.
Er verknüpft die auf die Probe einwirkende Schubspannung
beschreibt in der Schwingungsrheometrie
das Verhalten viskoelastischer
Körper bei einer oszillierenden
Scherbelastung.
Er verknüpft die auf die Probe einwirkende Schubspannung  mit der resultierenden Scherdeformation
mit der resultierenden Scherdeformation
 .
.
Der komplexe Schubmodul kann messtechnisch relativ einfach mit einem Rheometer (für Flüssigkeiten) und durch Dynamisch-mechanische Analyse (für Feststoffe) bestimmt werden. Die Veränderung des komplexen Schubmoduls bei Variation von Amplitude, Frequenz oder anderen Parametern wie der Temperatur gibt Aufschluss über die Eigenschaften des Materials. So kann z.B. der lineare Bereich ermittelt, auf die Molekülstruktur geschlossen oder ein Vernetzungsvorgang untersucht werden.
Speicher- und Verlustmodul
Allgemein hat der komplexe Schubmodul die Form einer komplexen Zahl:

mit
- dem Speichermodul
 (Realteil),
der für den elastischen
Anteil steht. Er ist proportional zu dem Anteil der Deformationsenergie, der
im Material gespeichert wird und nach Entlastung wieder aus dem
Material gewonnen werden kann.
(Realteil),
der für den elastischen
Anteil steht. Er ist proportional zu dem Anteil der Deformationsenergie, der
im Material gespeichert wird und nach Entlastung wieder aus dem
Material gewonnen werden kann. - dem Verlustmodul
 (Imaginärteil),
der für den viskosen
Anteil steht. Er entspricht dem Verlustanteil der Energie, welcher
durch innere
Reibung in Wärme
umgewandelt wird.
(Imaginärteil),
der für den viskosen
Anteil steht. Er entspricht dem Verlustanteil der Energie, welcher
durch innere
Reibung in Wärme
umgewandelt wird.
Der Quotient aus
und
ist der Verlustfaktor
 :
:

Er nimmt für einen ideal elastischen Körper den Wert 0 an 
für einen ideal viskosen Körper geht er gegen unendlich 
Grundlagen
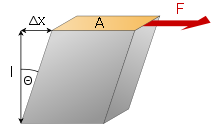
Erfährt ein Körper eine Scherung
 ,
,
so ist dazu die Schubspannung

notwendig
mit
 - Scherwinkel
- Scherwinkel - Verformungsweg
- Verformungsweg - Dicke des betrachteten Körpers
- Dicke des betrachteten Körpers - Verformungskraft
- Verformungskraft - Fläche.
- Fläche.
Das Verhalten eines viskoelastischen Materials, d.h. der Zusammenhang zwischen Schubspannung und Scherung, kann durch rheologische Modellkörper nachgebildet werden, die sich zusammensetzen aus
- Federn
(Hooke-Elementen), die den rein elastischen Anteil darstellen. Hier ist
die Schubspannung
 über den Schubmodul
über den Schubmodul  mit der Scherung
mit der Scherung  verbunden:
verbunden:

- Setzt man den Körper einer sinusförmigen
Scherung mit Amplitude
 und Kreisfrequenz
und Kreisfrequenz
 aus:
aus:

- so gilt im elastischen Zweig:

- Bei einem ideal elastischen Körper hat also auch die Schubspannung einen sinusförmigen Verlauf, und zwar in Phase mit der Scherung: im Nulldurchgang der Schwingung erfährt der Körper keine Verformung und deswegen ist auch keine Schubspannung zur Überwindung der Rückstellkraft notwendig. In der Amplitude ist dagegen der Körper maximal verformt, dann ist auch die Rückstellkraft am größten.
- Dämpfungszylindern
(Newton-Elementen mit einer newtonschen
Flüssigkeit) für den ideal viskosen Anteil. Hier ist die Schubspannung
 über die Viskosität
über die Viskosität
 mit der Schergeschwindigkeit
mit der Schergeschwindigkeit
 verbunden, also mit der ersten
Ableitung der Scherung:
verbunden, also mit der ersten
Ableitung der Scherung:

- Ein ideal viskoser Körper weist also einen um 90° phasenverschobenen Verlauf der Schubspannung auf: im Nulldurchgang der Deformation ist die Änderung der Verformung am größten, deswegen ist auch der von der Flüssigkeit entgegengesetzte Widerstand, der überwunden werden muss, am größten. In der Amplitude kehrt sich die Bewegungsrichtung um, die Schergeschwindigkeit und damit auch die Schubspannung werden für einen Moment zu Null.
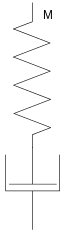
Einfache Modelle zur Beschreibung eines viskoelastischen Festkörpers sind z.B.
- das Maxwell-Modell, d.h. die Hintereinanderschaltung einer Feder mit einem Dämpfungselement, oder
- das Kelvin-Modell, d.h. die Parallelschaltung einer Feder mit einem Dämpfungszylinder.
Herleitung für den Kelvin-Körper

Bei einem Kelvin-Körper ist wegen der Parallelschaltung die Scherung
in beiden Zweigen dieselbe, die Gesamtschubspannung setzt sich dagegen aus den
Schubspannungen in Hooke- und Newton-Element zusammen:

Rein formal entsprechen die Beziehungen der Parallelschaltung eines ohmschen Widerstandes mit einer Induktivität in der Elektrizitätslehre. Wie dort kann die Gleichung mit einem Zeigerdiagramm umgeformt werden zu:

mit

und

Die Schubspannung ist also um den Phasenwinkel
 ,
der einen Wert zwischen 0° und 90° annehmen kann, gegenüber der
Scherung verschoben.
,
der einen Wert zwischen 0° und 90° annehmen kann, gegenüber der
Scherung verschoben.
In Analogie zur komplexen Wechselstromrechnung können die Größen auch mit komplexen Funktionen beschrieben werden:


Dann ist der komplexe Schubmodul
der Quotient aus komplexer Schubspannung und komplexer Scherung:

Der Kehrwert

wird als komplexe Nachgiebigkeit bezeichnet.
Komplexe Viskosität
Leitet man  ab, so erhält man die komplexe Schergeschwindigkeit:
ab, so erhält man die komplexe Schergeschwindigkeit:

Damit lässt sich die komplexe Viskosität  berechnen:
berechnen:

Ihr Betrag ist:

Aus dem Realteil von  wird die dynamische Viskosität berechnet:
wird die dynamische Viskosität berechnet:



© biancahoegel.de
Datum der letzten Änderung: Jena, den: 04.08. 2022