Sekundärradar
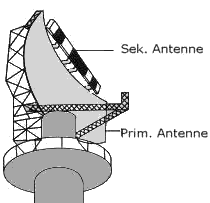

Ein Sekundärradar ist ein Radar, das mit aktiven Zielen arbeitet und deshalb mit geringerer Leistung arbeiten kann. Im Gegensatz zum Primärradar, bei dem am Ziel nur eine (passive) Reflexion stattfindet, sendet beim Sekundärradar ein Abfragegerät (Interrogator) ein Datensignal, das aktiv vom einem Transponder im/am Zielobjekt mit einer "Antwort" erwidert wird. Diese Antwort kann Zusatzinformationen wie die Flughöhe oder Freund-Feind-Erkennung enthalten.
Anwendung finden Sekundärradargeräte hauptsächlich in der Luftfahrt, jedoch wurden mit der Zeit weitere Anwendungsgebiete erschlossen. Sie dienen der Radarüberwachung, vorwiegend im Verkehrswesen.
Entwicklung
Das Sekundärradarverfahren hat sich aus einem militärischen System entwickelt, dessen ursprüngliche Aufgabe die Unterscheidung von Freund und Feind auf dem Radarschirm war. Während des Zweiten Weltkrieges bestand für die englische Luftabwehr die dringende Notwendigkeit, zwischen eigenen und gegnerischen Zielzeichen auf dem Radarschirm unterscheiden zu können. Deshalb wurde von Frederic Calland Williams und Bertram Vivian Bowden ein System entwickelt, das später als Identification Friend Foe(IFF) bekannt wurde.
Die ersten Systeme (IFF Mark I und Mark II) haben nur den Sendeimpuls des Radargerätes empfangen und verstärkt wieder ausgesendet. Der Transponder wurde nur auf Anforderung eingeschaltet. Im Radargerät waren keine technischen Erweiterungen nötig: Das eigene Flugzeug wurde auf dem Radarschirm doppelt dargestellt. (Eine Folge der internen Signal-Laufzeit im Transponder.) Erst ab dem System IFF Mark III wurde die Antwort auf einem eigenen Frequenzband, damals auf 157 bis 187 MHz, gesendet. Ab diesem Zeitpunkt war ein spezieller Empfänger im Radargerät nötig.
Ab 1943 wurde als gemeinsames britisch-amerikanisches Projekt in den United States Naval Research Laboratory unter Federführung des nach Washington umgezogenen Doktor Bowden das IFF Mark V entwickelt und unter der Bezeichnung United Nations Beacon (UNB) für eine Serienproduktion angepasst. Dieses IFF System arbeitete schon im Frequenzband 950 bis 1150 MHz, also dem gleichen Frequenzband wie das moderne IFF/SIF. Eine Weiterentwicklung dieses Prinzips wurde schon als Mark X bezeichnet. Der Buchstabe X stand hier vorerst als Zeichen für eine unbekannte Versionsnummer. Dieses System war noch sehr einfach strukturiert und arbeitete auf 12 verschiedenen Kanälen mit einem Frequenzabstand von 17 MHz. Dieses Mark X (IFF) konnte noch keine individuelle Identifikation eines Flugzeuges übermitteln.
Erst die Weiterentwicklung zu dem System Mark X (SIF), mit der nun vergebenen Bedeutung für das Zeichen X als römische Zahl Zehn und der Abkürzung SIF für Selective Identification Feature, hat mit einer impulskodierten Antwort eine individuelle Identifikation ermöglicht. Auf dieser Basisversion wurde durch die Internationale Zivilluftfahrt-Organisation (ICAO) im Jahre 1953 der internationale Standard Mark X formuliert und mit vielen Erweiterungen bis in das Jahr 2008 hinein als Grundlage für die zivile Nutzung des Sekundärradars in der Flugsicherung definiert, während die rein militärische Nutzung des Standards Mark X mehr und mehr an Bedeutung verlor.

Im gleichen Zeitraum wurde in der ehemaligen Sowjetunion ebenfalls ein Sekundärradar als Kennungsgerät entwickelt. Hier wurde unter der Systembezeichnung Kremni auf einer Frequenz im UHF-Bereich ein drei- und manchmal vierstelliges Impulsmuster ausgesendet, das durch den Transponder empfangen, bei Vorliegen einer gültigen Codierung (nur drei Impulse sind eine gültige Abfrage, der vierte Impuls ist zur Täuschung) mit einer Niederfrequenz moduliert und wieder ausgesendet wurde. Diese Niederfrequenz stellte die Kennung dar und wurde durch zwölf steckbare Codefilter realisiert. Diese verschiedenen Filter wurden in den Streitkräften des Warschauer Paktes nach einem zentral vorgegebenen geheimen, pseudo-zufälligen Schema im Abstand von zwei bis sechs Stunden gewechselt. Von Russlands Pazifikküste über Europa bis nach Kuba wurden diese Codefilter unabhängig von der lokalen Zeitzone gleichzeitig gewechselt. Eine zivile Nutzung war eigentlich nicht vorgesehen, aber da die zivile Luftfahrt staatlich organisiert war und alle zivilen Flugzeuge im Falle einer Mobilmachung als Militärtransporter verwendet werden sollten, waren auch alle zivilen Flugzeuge mit diesem Transponder ausgestattet.
Die militärische Anwendung des Sekundärradarverfahrens ist heute noch eine wesentliche Aufgabe, allerdings ist der Codeumfang des IFF/SIF für eine nachahmungssichere Freund/Feind- Kennung viel zu gering. Deshalb wurde später für rein militärische Anwendungen das als IFF Mode 4 und Mode 5 bezeichnete, mit Kryptorechnern verschlüsselte Datenübertragungsverfahren in das SIF integriert.
Aus der militärischen Begriffswelt stammen die Bezeichnungen der Mark-Systeme. Sie fassen mehrere Identifizierungsmodi in einem Namen zusammen und wurden in dem Standardization NATO Agreement 4193 (STANAG 4193 Part I - VI) beschrieben.
- Mark X oder MkX (sprich "mark ten") umfasst die Modi 1, 2, 3/A;
- Mark XA oder MkXA umfasst die Modi 1, 2, 3/A, C;
- Mark XII oder MkXII umfasst die Modi 1, 2, 3/A, C, 4;
- Mark XII-A oder MkXII-A umfasst die Modi 1, 2, 3/A, C, 4, 5;
- Mark XII-A/S oder MkXII-AS umfasst die Modi 1, 2, 3/A, C, 4, 5, S
In älterer Literatur werden noch die Begriffe Super Beacon und Discrete Address Beacon System (DABS) als ehemalige Bezeichnungen für das Mode S- Verfahren verwendet.
Funktionsweise
Das Sekundärradarprinzip ist ein Ortungsverfahren mit Laufzeitmessung, das im Gegensatz zur herkömmlichen Radartechnik nicht mit der am Ziel reflektierten Energie, also dem passiven Echo eines Zieles arbeitet, sondern bei dem sich an Bord des Zieles ein aktives Antwortgerät (Transponder) befindet. Bei einem Sekundärradar antworten die Ziele aktiv auf ein empfangenes Radarsignal mit dem Aussenden einer Antwort auf der gleichen oder einer anderen Frequenz. Bei dem in der Zivilluftfahrt verwendeten System wird die Abfrage auf der Frequenz 1030 MHz und die Antwort auf der Frequenz 1090 MHz übertragen.
Hierzu wird der Radarimpuls mit einer Antenne empfangen und löst die Ausstrahlung eines charakteristischen "Echos" über die gleiche Antenne aus. Diese Antwort kann eine charakteristische Modulation oder ein Datenpaket sein. Im einfachsten Fall ist dies der verzögerte Radarimpuls selbst, bei ersten Systemen zur Freund-Feind-Kennung wurde ein doppelter Punkt auf den Radarschirm geschrieben - ein Punkt vom passiven Reflexionssignal und dahinter ein weiterer vom (verzögerten) Sekundärradar.
Beide Systeme haben auf Grund der unterschiedlichen Prinzipien verschiedene Vor- und Nachteile. Wesentlicher Vorteil des Sekundärradars gegenüber dem Primärradar ist dessen deutlich höhere Reichweite sowie die Möglichkeit der Identifizierung des Zieles. Mit dem Primärradar werden sichere Informationen über Richtung, Flughöhe und Entfernung der Ziele und das völlig unabhängig vom Ziel gewonnen. Ein Sekundärradar stellt zusätzliche Informationen, wie Kennung, Identifizierung und ebenfalls Höhe der Ziele bereit. Allerdings ist dazu die Mitarbeit des Ziels notwendig. Fehlt diese Mitarbeit, zum Beispiel weil der Transponder defekt ist, so ist das Sekundärradar nicht arbeitsfähig und dieses Flugobjekt wird nicht erkannt. Deshalb arbeiten die meisten Sekundärradargeräte in einer Kombination mit einem Primärradar.
Blockschaltbild
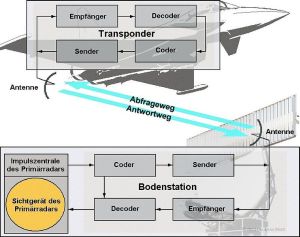
Das Verfahren besteht aus zwei Geräten: dem Abfragegerät (Interrogator) und dem Antwortgerät (dem Transponder). In der Luftfahrt sind die Abfragegeräte teilweise Bodenstationen, teilweise (vor allem bei Jagdflugzeugen) kann ein Interrogator wie die Transponder in einem Flugzeug eingerüstet sein.
Der Interrogator sendet abhängig von der jeweiligen Modulationsart (dem sogenannten Mode) eine beispielsweise mit verschiedenen Impulsen verschlüsselte Abfrage aus. Diese Impulse werden vom Transponder empfangen und ausgewertet. Je nach dem Inhalt der Abfrage wird eine Antwort generiert, wieder verschlüsselt und ausgesendet.
Durch die Laufzeitmessung zwischen Sendeimpulsen und dem Antworttelegramm kann die Entfernung zwischen Abfragegerät und Antwortgerät errechnet werden. Durch die im Transponder durch Decodierung und Codierung verursachten Verzögerungen ist diese Entfernungsberechnung nur korrekt, wenn diese zusätzliche Verzögerungszeit bekannt ist.
Reichweitenkalkulation
Durch aktive Mitarbeit des Ziels kann eine drastische Reduzierung der notwendigen Sendeleistung bei gleicher Reichweite erreicht werden, da bei Primärradar die Freiraumdämpfung mit dem Hin- und Rückweg in die Radargleichung eingeht, bei Sekundärradar nur mit dem Hinweg, da der Rückweg als eigenständige Funkverbindung zählt. Im Gegensatz zum Primärradar, bei dem die Reichweite durch die vierte Wurzel in der Radargleichung geprägt wird, wird beim Sekundärradar die Reichweite durch eine Funktion mit einer Quadratwurzel berechnet. Als Richtwert kann hier ein Faktor um 1000 angenommen werden. Daraus folgt ein erheblich einfacherer, kleinerer und vor allem billigerer Sender. Die in der Praxis übliche Sendeimpulsleistung eines Sekundärradars liegt zwischen 250 und maximal 2000 Watt. In der gleichen Größenordnung liegt auch die Sendeleistung der Transponder.
Gleichzeitig kann der Empfänger unempfindlicher sein, da die Leistungen der aktiven Antworten höher sind als die der passiven Echos. Bei einem Primärradar erreicht die Empfängerempfindlichkeit bei guten Radarempfängern Werte von −110 dBm … −120 dBm. Bei einem Sekundärradar sind Werte um Pe= −65 dBm optimal, um ausreichend empfindlich und gleichzeitig ausreichend störsicher zu sein. Die Reichweite wird nach der Formel:
Ps= Sendeleistung
Pe= Empfangsleistung
Gs= Gewinn der Sendeantenne
Ge= Gewinn der Empfangsantenne
λ = Wellenlänge (hier etwa 29 cm)
L= Verluste (englisch: Losses)
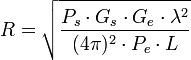
berechnet.
Da beim Sekundärradar wie beim Primärradar
die Sende- und Empfangsantennen (und somit die in die Formel einzusetzenden
Antennengewinne) sowohl auf dem Abfrageweg als auch auf dem Antwortweg gleich
sind, ist hier der einzige Unterschied durch die verschiedenen Wellenlängen bei
1030 Mhz (Abfrageweg) und 1090 Mhz (Antwortweg) gegeben. Der
Transponder kann durch die geringfügig höhere Sendefrequenz mit einer
geringfügig niedrigeren Sendeleistung arbeiten, da beide Antennen für die
Antwortfrequenz eine effektivere Wirkfläche
besitzen.
Aus der Reichweitenformel ist vor allem die notwendige Sendeleistung des Abfragegerätes zu berechnen. Die Transponder müssen immer mit voller Leistung (knapp 2 kW) antworten, da dem Transponder die Entfernung des Abfragesenders nicht bekannt ist. Nur im Abfragesender ist bekannt, bis zu welcher Reichweite die IFF/SIF-Informationen überhaupt dargestellt werden können. Deswegen kann die Reichweitenformel nach der Sendeleistung des Abfragesenders umgestellt werden:
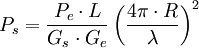
Der Term im Quadrat ist hier die Freiraumdämpfung bei einer konstanten Wellenlänge als Funktion der Entfernung. Die Verluste L können in interne Verluste von der Antenne bis zum Plotextraktor (insgesamt etwa -3,5 dB) und externe Verluste durch die Diagrammform der Antenne, durch Interferenzen beim Vorliegen von Reflexionen (durchschnittlich mit -4 dB) oder dem Einfluss eines Radoms (etwa -0,2 dB) eingeteilt werden. Unter sehr ungünstigen Bedingungen können die internen und externen Verluste insgesamt bis zu -9 dB erreichen.
| Empfängerempfindlichkeit | - 65 dBm |
|---|---|
| Freiraumdämpfung für 278 km (abgerundet) | + 140 dB |
| Antennengewinne | - (+ 27 dB) |
| Verluste (aufgerundet) | + 9 dB |
| = notwendige Sendeleistung | 57 dBm |
Mit Einberechnung der Antennengewinne und der Verluste können vom Sender zum Empfänger für eine Reichweite von 150 nautischen Meilen (= 278 km) Dämpfungen von 122 dB angenommen werden. Die Empfängerempfindlichkeit der Transponder beträgt mindestens -65 dBm. Der Sender muss für diese Entfernung demzufolge eine Impulsleistung von

aufbringen. Eine größere Sendeleistung als 500 Watt für die maximal darstellbare Entfernung von 150 nautischen Meilen hat keinen Einfluss mehr auf die Reichweite und bewirkt lediglich eine Vergrößerung der gegenseitigen Störungen durch Fruit. Die Sender der Sekundärradargeräte sind in der Flugsicherung meist für eine Impulsleistung von 2 000 Watt ausgelegt, können jedoch in -3 dB Schritten in der Sendeleistung reduziert werden. Wenn das Primärradar zum Beispiel nur eine begrenzte Reichweite hat, dann ist eine Vergrößerung der Sendeleistung des Sekundärradars kontraproduktiv.
Betriebsorganisation
Das Sekundärradarverfahren wird in der zivilen und militärischen Luftfahrt mit einander kompatiblen Systemen angewendet:
-
- zivil: "SIF" für Selective Identification Feature sowie "SSR" für Secondary Surveillance Radar
- militärisch: "IFF" für Identification Friend or Foe - Freund-Feind-Erkennung
Sekundärradar bietet in der Luftfahrt zusätzliche Informationen über ein Flugzeug, die ein Primärradar nicht beziehungsweise nicht in der Qualität ermitteln kann. Es ist ein kooperatives Verfahren, das heißt:
-
- Das Flugzeug muss bei dem Verfahren mitarbeiten und
- die einzelnen Schritte des Verfahrens müssen standardisiert sein, damit Flugzeug und Bodenstation einander verstehen.
Standard Mark X
Durch die ICAO werden verbindliche Standards definiert, die das Sekundärradarverfahren regeln. Ein solcher Standard ist als Mark X (sprich: Mark ten) bekannt. In diesem Standard sind die klassischen Mode und Code definiert. Das Ziel dieser Abfrage ist eine Identifizierung des Flugzeuges und die Abfrage der Zusatzinformation Flughöhe.
Abfrageformat
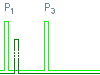
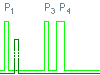
Die Abfrage wird oft auch als Mode bezeichnet. Die Frage lautet etwa: "Wer bist du?" Der Transponder im Flugzeug antwortet darauf mit einem Transpondercode. Alternativ dazu kann auch abgefragt werden "Wie hoch fliegst du?" (Diese Frage ergab sich daraus, dass die meisten Radargeräte früher nur 2D-Radargeräte waren.) Das Flugzeug antwortet darauf mit einem weiteren Code. Mode und Code gehören immer zusammen, denn wenn die Frage nicht bekannt ist, ist der geantwortete Zahlenwert nicht eindeutig. Der Mode wird durch den Abstand zwischen zwei kurzen Sendeimpulsen kodiert übertragen und hat folgende Bedeutungen:
| Mode | Abstand zwischen P1 - P3 |
Verwendung | |
|---|---|---|---|
| militärisch | zivil | ||
| 1 |  3 (±0.2) µs |
Militärische Identifikation
Dieser Mode unterstützt nur 32 verschiedene Codes (obwohl ebenfalls 4096 Codes technisch möglich sind). Im Normalfall werden durch diese Codes Informationen über Einsatzzweck, -aufgabe und Typ übermittelt. Wird in Friedenszeiten kaum genutzt. | |
| 2 | 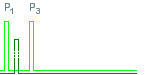 5 (±0.2) µs |
Militärische Identifikation
Der Mode 2 enthält 4096 verschiedene Codes für militärische Zwecke (wie Mode A). Im Normalfall werden durch diese Codes ein individueller Code des Flugzeuges (militärische Kennung) übermittelt. | |
| 3 | A | 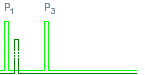 8 (±0.2) µs |
Zivile und militärische Identifikation
Die Antwort auf den Mode A (Code) ist eine vierstellige Zahl (oktal 0000 bis 7777; drei Bit beziehungsweise Pulse pro Stelle BCD-Kodiert) zur Identifikation des Flugzeugs. Er wird vom Piloten am Transponder direkt oder an der abgesetzten Bedieneinheit eingegeben. (War mal als Individualcode gedacht, reicht aber für diese Aufgabe heute nicht mehr aus.) |
| B | 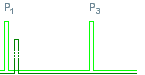 17 (±0.2) µs |
nicht verwendet | |
| C | 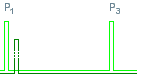 21 (±0.2) µs |
Barometrische Höhenangabe
Flughöhe des Flugzeuges in 25-Fuß-Schritten (früher in 100-Fuß-Schritten). Dieser Wert wird von einem barometrischen Höhenmesser ermittelt, der in allen Flugzeugen der Welt dieselbe Standardeinstellung hat (ICAO Standard Atmosphere). Der Wert wird technisch ähnlich wie der Mode 3/A übertragen, jedoch nicht direkt oktal codiert, sondern mittels Gillham-Code. Der Wertebereich umfasst Angaben von -1000 bis 127.000 Fuß. | |
| D |  25 (±0.2) µs |
nicht verwendet | |
Bei den Anfragen, die bei diesem Verfahren generell auf 1030 MHz gesendet werden, ist jeweils noch ein Impuls P2 integriert. Dieser dient der ebenkeulenunterdrückung und bewirkt, dass nur Transponder aus der Hauptrichtung auf die Abfrage antworten.
Antworttelegramm
Das Antworttelegramm ist bei allen bisher genannten Modi 20,3 µs lang und wird auf der Frequenz 1 090 MHz übertragen. Bei dieser Antwort muss ein größerer Toleranzbereich akzeptiert werden, weil zum Beispiel in großen Höhen bei starker Kälte die frequenzbestimmenden Bauteile des Transponders größere Abweichungen vom Sollwert haben.
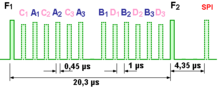
Das Antwort- Telegramm besteht aus 2 bis 15 Impulsen mit einer Impulsdauer von je 0,45 µs (±0,1 µs). Die beiden Rahmenimpulse F1 und F2 im Abstand von 20,3 µs müssen mindestens vorhanden sein, damit vom Empfänger diese Impulse als gültige Antwort erkannt werden. Zwischen den Rahmenimpulsen gibt es im Abstand von 1,45 µs insgesamt 13 Positionen für die Codierimpulse. Von diesen werden im Mode A und C nur maximal 12 für die Übertragung der gewünschten Information in einem Oktalcode genutzt. Die drei Leerstellen dürfen nicht durch Impulse belegt sein, da sonst manche Decoder die gesamte Antwort als Störung interpretieren und somit verwerfen. Das Antwort- Telegramm enthält jedoch keinerlei Information über den Mode. Der Decoder des Sekundärradars geht immer davon aus, dass die empfangene Antwort zu dem als letztes abgefragten Mode passt.
Die Impulse zwischen den Rahmenimpulsen beinhalten den Code, der abhängig vom Abfragemode die gewünschte Information als Oktalzahl enthält. Durch die Anzahl von 12 möglichen Impulsen ist der Wertevorrat der eindeutigen Informationen auf 409610 begrenzt.
Der SPI-Impuls (special position identification pulse) wird beim "squawk ident", nach manuellen drücken des Piloten der Taste "IDENT" im Bedienfeld des Transponders, 4,35 µs (drei Rasterintervalle) nach dem Rahmenimpuls F2 platziert. Dadurch blinkt z.B. bei DERD-Radarbildschirmen das Kopfsymbol des SSR-Ziels auf.
Die Verschachtelung der Impulse und die Leerstelle in der Mitte sind aus historischen Gründen enthalten. Der Vorläufer dieses Verfahrens hatte nur die Möglichkeit, zwei Oktalzahlen zu übertragen. Später wurden aus Kompatibilitätsgründen die zusätzlichen Oktalzahlen in die Zwischenräume der alten Antwort gelegt.
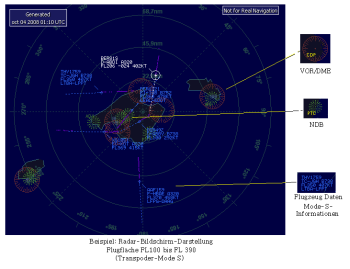
Anzeige

Im einfachsten Fall wird auf dem Radarschirm hinter dem Zielzeichen des Primärradargerätes ein weiteres, meist etwas dünneres Zielzeichen angezeigt. Der Abstand entsprach anfangs der zusätzlichen Verzögerungszeit im Transponder. Später konnte er individuell am Sichtgerät eingestellt werden. Die Zahlenwerte des Identifizierungscodes und die Höhenangabe müssen auf einem zusätzlichen Display aus Leuchtdioden am Sekundärradar oder an einer abgesetzten Anzeige neben dem Primärradarbildschirm abgelesen werden. Einige Radargeräte können diese Zusatzinformationen auf dem Bildschirm selbst als Zahlenangabe einblenden.
Moderne digitale Radargeräte können die Informationen des Sekundärradars mit dem Zielzeichen des Primärradargerätes zusammenfügen. Hier werden beide Radarinformationen in je einen Plotextraktor zu einem digitalen Datenwort verarbeitet, die dann im Radar Data Processor zu einem Datensatz korreliert werden. Die Anzeige erfolgt also auf dem digitalen Bildschirm des Primärradargerätes. Da die Signalverzögerungszeiten nun auch in der Bodenstation sich erheblich unterscheiden, muss die Antenne des Sekundärradargerätes mit einem kleinen Winkelversatz auf der Primärradarantenne montiert werden.
Standard Mark XII (Mode S)
Ein weiterer durch die ICAO definierter verbindlicher Standard (Mark XII - sprich: Mark twelve) wird auch als Mode S (Mode Selektive) bezeichnet. Diese neue Standardisierung wurde erforderlich, weil die bisherigen Systeme durch den angestiegenen Flugverkehr an ihre Kapazitätsgrenzen gelangt waren. Gründe waren: Überschreitung der maximalen Zahl der verarbeitbaren Ziele, falsche Radarechos (z.B. durch ACAS-Abfragen generierter FRUIT), begrenzte Azimutauflösung. Dies führte in mehreren Fällen dazu, dass Flugzeuge auf dem Radarschirm falsch oder gar nicht dargestellt wurden ("lost targets"). Ein weiterer Punkt war, dass der Wertevorrat für Mode 3/A (mit nur 4096 verschiedenen Codes) zu klein wurde.
Beim Mode S hat jeder Transponder eine fest einprogrammierte individuelle Adresse. Der Standard sieht vor, dass bei einer Abfrage nicht mehr alle Transponder antworten, sondern nur noch diejenigen, die ausdrücklich über ihre Adresse angesprochen werden. Dadurch wird die Anzahl der Antwortsignale massiv gesenkt. Außerdem enthält auch das Antwortsignal die Adressinformation, so dass es eindeutig dem jeweiligen Flugzeug zugeordnet werden kann und FRUIT ausgeschlossen wird. Dieser Standard wurde durch die ICAO festgelegt und ist für Flugzeugneuzulassungen vorgeschrieben.
"Die individuelle SSR Mode S Adresse soll eine von 16.777.214 möglichen 24-Bit Adressierungen sein, die durch die ICAO oder einer staatlichen oder einer anderen bevollmächtigten allgemeinen Registrierungsbehörde zugeteilt wird."

Unten: Flugzeug der ČSA mit zusätzlichen Mode-S- Informationen
Das bisherige Identifizierungssystem im Mode 3/A hat durch den verwendeten vierstelligen Oktalcode nur einen Wertevorrat von 4.096 verschiedenen Identifizierungscodes. Deshalb musste dieser Code dynamisch zugewiesen werden, das heißt, beim Durchflug durch verschiedene Zuständigkeitszonen wurde dem Flugzeug ein jeweils neuer Identifizierungscode zugewiesen. Das hat bisher die Gefahr von Verwechslungen auf dem Radarschirm verursacht.
Das Mode-S-System kann als Basisprotokoll für die Kommunikation zwischen dem Transponder im Flugzeug und dem Sekundärradar am Boden definiert werden. Neben dem Identifizierungscode, der nun individuell für ein Flugzeug vergeben wird, können sehr viel mehr Informationen über den aktuellen Flugzustand an das Sekundärradar übertragen werden. Der militärische Mode 4 ist für zivile Geräte nicht auswertbar, da die Antworten kodiert und der Inhalt daher klassifiziert (classified/geheim) ist.
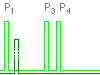
Ein wesentlicher Vorteil des Systems ist, dass die Bodenstationen die abgefragten Informationen über ein Netzwerk austauschen können. Das verringert die Abfragehäufigkeit und somit auch die gegenseitigen Störungen durch Fruit. Das setzt allerdings voraus, dass wenn die selektive Abfrage eines Flugzeuges erfolgt ist, dessen Antwort einem Primärecho zugeordnet wird und eine weitere Abfrage unterbleibt. Die Abfrage muss wieder abwärtskompatibel sein. Ein alter Mark-X-Transponder darf durch die Mode-S-Abfragen nicht verwirrt werden. Deshalb werden diese alten Transponder wie bisher abgefragt, allerdings wird dem Protokoll ein vierter Impuls (P4) angehängt, der einen Mode-S-Transponder für diese Abfragen sperrt. Die alten Transponder kennen diesen Impuls nicht und ignorieren ihn.
Die Abfragemöglichkeiten einer mode-S-fähigen Bodenstation werden grob in zwei Typen klassifiziert:
All-call interrogations
- "All-call interrogations" erwarten von allen Flugzeugen im Auffassungsbereich eine Antwort. Doch unter bestimmten Bedingungen kann der Mode-S-Transponder diese Antworten sperren. Zum Beispiel kann eine erfolgreiche Abfrage bewirken, dass die diese Abfrage auslösende Bodenstation keine Antworten auf diesen Abfragemode mehr erhält. Der Transponder erwartet von dieser Bodenstation nun eine "Roll-call interrogation".
Roll-call interrogations
- "Roll-call interrogations" sind individuell (selektiv) adressierte Abfragen, auf die nur der eine angesprochene Mode-S-Transponder reagiert. Die Antwort auf diese selektive Abfrage ist ein Telegramm aus bis zu 112 Bit, das diverse Informationen wie Kurs, Geschwindigkeit oder Ausweichempfehlungen vom bordeigenen Kollisionswarnsystem (siehe TCAS) enthalten kann. Der genaue Inhalt kann vom Fluglotsen aus einem Pool von Möglichkeiten ausgewählt werden.
Übertragungsprotokolle
Uplink
Neben der eigentlichen Mode-S-Abfrage müssen durch die Bodenstationen auch zum Mark-X-System kompatible Impulsmuster gesendet werden, die in der folgenden Tabelle gezeigt werden:
| Impulsdauer von P4 | Mode S inter mode | |
|---|---|---|
 kein P4 |
Mode A reply | Diese Abfrage wird abwärtskompatibel für nicht mode-S-fähige Transponder gesendet. Da der Transponder nicht erkennen kann, ob eine mode-S-fähige Bodenstation abfragt, antwortet er auch. |
 0,8 µs |
no reply | Deshalb wird durch Mode S-fähige Abfragestationen ein kurzer P4-Impuls gesendet, dann antwortet ein Mode-S-Transponder nicht. Alte Transponder kennen diesen Impuls nicht und antworten. |
 1,6 µs |
all-call reply | Ein langer P4-Impuls wird gesendet, um eine "All-call interrogation" auszulösen. Dieser Mode wird selten verwendet, da es andere und bessere Möglichkeiten gibt, den Individualcode zu erfassen und eine gezielte Mode-S-Abfrage auszulösen. |
 kein P4 dafür großer P2 |
Mode S reply | Das Radar sendet einen P2-Impuls mit gleicher Amplitude wie der P1-Impuls. Das aktiviert Mode S Transponder zu dem Empfang des P6-Impulses mit dem Datenblock. Für nicht Mode-S-fähige Transponder erscheint diese Abfrage wie als aus einer Nebenkeule und wird deswegen durch die erfüllte ISLS- Bedingung nicht beantwortet. |
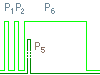
Als Übertragungsprotokoll wird auf dem sogenannten Uplink-Weg (Abfrage von der Bodenstation hoch zum Flugzeug) innerhalb des P6-Impulses eine Impulsmodulation mit differenzieller Phasenumtastung (DPSK) genutzt. Da der P2-Impuls nun zur Sperrung der alten Transponder verwendet wird, muss die Nebenkeulenunterdrückung anders gelöst werden. Ein fünfter Impuls P5 wird wie früher der P2-Impuls über eine Antenne mit Rundstrahlcharakteristik ausgesendet. Dieser Impuls überdeckt das Synchron-Bit im P6-Impuls. Ist der P5-Impuls zu groß, dann kann der Transponder den Impuls P6 nicht decodieren. Der P6-Impuls kann entweder 56 oder 112 Bit enthalten.
Technisch ist es auch möglich, über den Uplink Informationen an Flugzeuge zu schicken, beispielsweise Wetterdaten, Informationen über sich annähernde Flugzeuge (TIS, traffic information service, in den USA), Flugfreigaben etc. Diese Möglichkeiten werden in der EU noch nicht ausgenutzt. Insgesamt sind 25 verschiedene Abfragen mit Mark-XII möglich; ebenso gibt es 25 individuelle Antwortmöglichkeiten.
Downlink
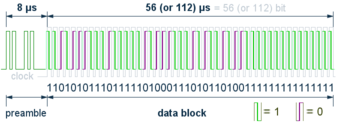
Auf dem Downlink-Weg (Antwort vom Flugzeug zum Abfragenden) ist es ungünstig, ebenfalls die differenzielle Phasenumtastung (DPSK) zu verwenden. Die Übertragungssicherheit wird durch die extremen Temperaturschwankungen, denen ein Transponder in großen Flughöhen ausgesetzt wird, ungünstig beeinflusst. Deshalb wird eine weniger anfällige Modulation, die Pulse Position Modulation (PPM) verwendet. Immer dann, wenn in einem dem Antwortdiagramm als Zeitraster hinterlegten Synchrontakt eine fallende Flanke erkannt wird, dann liegt eine logische "1" an. Bei einer steigenden Flanke wird eine logische "0" erkannt. Auch auf dem Antwortweg werden so entweder 56 oder 112 Bit übertragen.
Squitter-Mode
Eine Besonderheit der Mode-S-fähigen Transponder ist der sogenannte Squitter-Mode, bei dem der Transponder unabhängig von einer Abfrage und in regelmäßigen Abständen zum Beispiel GPS- Position und Identifizierung als Rundspruch sendet (ADS-B Automatic Dependent Surveillance - Broadcast). Die Unterstützung dieses Modes ist in Deutschland jedoch keine Pflicht. Auch sind noch nicht alle Mode-S-fähigen Transponder technisch in der Lage, eine solche Nachricht zu versenden.
Dieser Mode ermöglicht, mit einem einfachen über eine USB-Schnittstelle an einen Computer angeschlossenen Empfänger auf der Frequenz 1090 MHz ein virtuelles Radar aufzubauen, das mit einer kleinen Stabantenne die kommerziellen Flüge im Umkreis von etwa 40 km auf dem Computerdisplay in Echtzeit darstellen kann. Durch die Verknüpfung vieler solcher kleinen Empfangsstationen über ein Netzwerk sind lückenlose Darstellungen der Bewegungen im Luftraum möglich.
Ausrüstungsvorschriften
In Deutschland ist ein Transponder vorgeschrieben:
- Bei IFR-Flügen (§ 3 Verordnung über die Flugsicherungsausrüstung der Luftfahrzeuge
- Bei Sichtflug VFR-Flügen in den Lufträumen C und D(nicht Kontrollzone) (§ 4 FSAV)
- Bei VFR-Flügen in Lufträumen mit vorgeschriebener Transponderschaltung (Transponder Mandatory Zone – TMZ) (§ 4 FSAV)
- Bei VFR-Flügen bei Nacht im kontrollierten Luftraum (§ 4 FSAV)
- Bei VFR-Flügen mit motorgetriebenen Luftfahrzeugen oberhalb 5 000 Fuß über NN oder oberhalb einer Flughöhe von 3 500 ft über Grund (§ 4 FSAV)

© biancahoegel.de;
Datum der letzten Änderung: Jena, den: 21.03. 2021