Cauchysches Fundamentaltheorem
 dargestellte, lineare Funktion des Normalenvektors (schwarz)
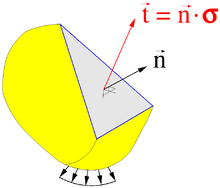
dargestellte, lineare Funktion des Normalenvektors (schwarz)Das Cauchy’sche Fundamentaltheorem (nach Augustin-Louis Cauchy) besagt,
dass der Spannungsvektor (ein Vektor
mit der Dimension Kraft pro Fläche) in einem materiellen Punkt auf einer
Schnittfläche in einem
Körper eine lineare Funktion des Normalenvektors
der Schnittfläche in diesem Punkt ist, siehe die Abbildung rechts, und diese
lineare Abbildung leistet ein, von der Orientierung der Schnittfläche
unabhängiger Spannungstensor
.
Cauchy begründete das Fundamentaltheorem mit dem im Folgenden skizzierten
Tetraederargument.
Mit dieser für die Kontinuumsmechanik zentralen Aussage führte Cauchy das wichtigste Hilfsmittel der Kontinuumsmechanik - die Tensorrechnung - ein. Vier Naturgesetze, die Impuls-, Drehimpuls- und Energiebilanz sowie der zweite Hauptsatz der Thermodynamik in Form der Clausius-Duhem Ungleichung werden in der Kontinuumsmechanik, in ihrer am materiellen Punkt gültigen Gestalt, mit Hilfe des Spannungstensors formuliert.
Das Cauchy’sche Fundamentaltheorem
Das Cauchy’sche Fundamentaltheorem besagt, dass in jedem Partikel eines materiellen Körpers der Schnittspannungsvektor der vom Cauchy’schen Spannungstensor transformierte Normalenvektor an die Schnittfläche ist [1]:
 .
.
Darin ist  der Schnittspannungsvektor,
der Schnittspannungsvektor,  der Normalenvektor, „
der Normalenvektor, „ “
das Symbol für die Vektortransformation und
der Cauchy’sche Spannungstensor. Alternativ kann auch
“
das Symbol für die Vektortransformation und
der Cauchy’sche Spannungstensor. Alternativ kann auch
 .
.
geschrieben werden. Der Spannungstensor ist von der Orientierung der Schnittfläche unabhängig.
Cauchy begründete diese Aussage mit dem Tetraederargument, das im Folgenden ausgeführt wird.
Der Tetraeder
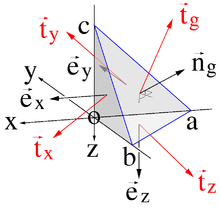
Cauchy’s Tetraederargument für die Einführung des Spannungstensors kann an einem, aus einem Körper herausgeschnittenen, Tetraeder eingesehen werden, siehe Abbildung rechts. Drei der Flächen des Tetraeders seien parallel zu einer beliebigen Orthonormalbasis ausgerichtet und im Schnittpunkt dieser drei Flächen liege der Ursprung (o im Bild) eines kartesischen Koordinatensystems mit x-, y- und z-Richtungen. Die Kanten des Tetraeders haben vom Ursprung aus gesehen die Längen a, b und c in negativer x-, y- bzw. z-Richtung. So besitzen die Flächen die Flächenelemente (Flächeninhalt mal Normale):

Das Flächenelement der vierten, schrägen Fläche berechnet sich mit dem Kreuzprodukt „ד:

Darin ist  die Frobeniusnorm eines
Vektors und
die Frobeniusnorm eines
Vektors und  der Normalenvektor
der Fläche.
der Normalenvektor
der Fläche.
Das Spannungsprinzip von Euler-Cauchy
Nach dem Spannungsprinzip von Euler-Cauchy existiert auf den Schnittflächen ein Feld von Spannungsvektoren, das die Wirkung des dort weggeschnittenen Teils des Körpers ersetzt. Dieser Umstand wird auch einfach Schnittprinzip genannt. Die Spannungsvektoren haben die Gestalt

wenn - wie üblich - die x-, y- und z-Koordinaten mit 1, 2 und 3 durchnummeriert werden. Der erste Index (i) bezieht sich also auf die Flächennormale und der zweite (j) auf die Komponente des Spannungsvektors. Bei hinreichend (infinitesimal) kleinem Tetraeder können diese Spannungsvektoren als konstant über die Flächen angenommen werden. Dem Cauchy’schen Postulat zufolge hängen diese Spannungsvektoren ausschließlich von den Normalenvektoren im betreffenden Punkt der Fläche ab und nicht z.B. von deren Krümmung.
Das zweite Newton’sche Gesetz
Das zweite Newton'sche
Gesetz besagt, dass die an den Tetraeder von außen angreifenden Kräfte -
unter anderem diese mit der Fläche multiplizieren Spannungsvektoren - den
Tetraeder beschleunigen. Wenn die Kantenlängen des Tetraeders die Größenordnung
L haben, dann sind die Flächen und die mit der Fläche multiplizieren
Spannungsvektoren von der Größenordnung L² und das Volumen des Tetraeders hat
die Größenordnung L³. Bei infinitesimal kleinen Kantenlängen (mit L  )
können die dem Volumen und damit der Masse proportionalen Größen (Schwerkraft
und Impulsänderung, umgangssprachlich Trägheitskraft) gegenüber den
Oberflächenkräften vernachlässigt werden. Also muss am infinitesimal kleinen
Tetraeder in allen Raumrichtungen die Summe der Oberflächenkräfte verschwinden.
Anders ausgedrückt müssen die Oberflächenkräfte im Gleichgewicht sein.
)
können die dem Volumen und damit der Masse proportionalen Größen (Schwerkraft
und Impulsänderung, umgangssprachlich Trägheitskraft) gegenüber den
Oberflächenkräften vernachlässigt werden. Also muss am infinitesimal kleinen
Tetraeder in allen Raumrichtungen die Summe der Oberflächenkräfte verschwinden.
Anders ausgedrückt müssen die Oberflächenkräfte im Gleichgewicht sein.
Der Cauchy’sche Spannungstensor
Summation der in x-, y- und z-Richtung an den Tetraeder angreifenden Oberflächenkräfte liefert:

Hier manifestiert sich der Cauchy’sche Spannungstensor
 ,
,
in dem die Spannungsvektoren in x-, y- und z-Richtung zeilenweise eingetragen
sind [1].
Das Rechenzeichen  bildet das dyadische
Produkt von zwei Vektoren.
bildet das dyadische
Produkt von zwei Vektoren.
Zwar ist der Cauchy’sche Spannungstensor symmetrisch, aber das ergibt sich erst aus der Drehimpulsbilanz, die hier nicht in die Betrachtung einfließt.
Das Tetraederargument
Nach dem zweiten Newton’schen Gesetz muss, wie oben dargelegt, die Summe aller Kräfte in jeder Raumrichtung verschwinden:
 .
.
Wenn also  gilt, dann sind die Kräfte im Gleichgewicht. An dieser Stelle zeigt sich das
Cauchy’sche Fundamentallemma:
gilt, dann sind die Kräfte im Gleichgewicht. An dieser Stelle zeigt sich das
Cauchy’sche Fundamentallemma:
 .
.
Nun ist auch umgekehrt

Es gilt also auch die Umkehrung: Wenn die Spannungsvektoren die vom Spannungstensor transformierten Normalenvektoren sind, dann herrscht am infinitesimal kleinen Tetraeder Gleichgewicht. Weil die Ausrichtung des Tetraeders und die Schräge seiner vierten Fläche beliebig gewählt werden können, folgt also aus dem zweiten Newton’schen Gesetz das Cauchy’sche Fundamentaltheorem
 .
.
Anmerkungen
- ↑ a
b
Manchmal wird die transponierte
Beziehung

benutzt, was den Nachteil hat, dass die Indizes der Komponenten der Spannungsvektoren an dieser Stelle nicht mit denen der Spannungskomponenten im Cauchy’schen Spannungstensor übereinstimmen. Weil der Cauchy’sche Spannungstensor aufgrund der Drehimpulsbilanz symmetrisch ist, hat diese Diskrepanz aber keine Auswirkungen.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 19.12. 2020