Regelfläche

In der Geometrie heißt eine Fläche Regelfläche, wenn gilt
- durch jeden Punkt der Fläche geht eine Gerade, die ganz in der Fläche enthalten ist.
Einfache Beispiele sind Ebenen, Zylinder, Kegel und einschalige Hyperboloide. Bei einem einschaligen Hyperboloid gehen durch jeden Punkt sogar zwei Geraden. Allerdings gilt: Eine Regelfläche, bei der durch jeden Punkt drei Geraden gehen, kann nur eine Ebene sein.
Bei konkreten Regelflächen beschränkt man oft die Erzeugenden auf Strecken, um eine unendliche Ausdehnung (z.B. bei Zylindern oder Kegeln) oder Selbstdurchdringungen (z.B. bei Regelschraubflächen) zu vermeiden.
Im Begriff Regelfläche hat Regel – wie auch in Kippregel – die ursprüngliche Bedeutung des lateinischen regula (Stab, Lineal), die heute noch im englischen rule oder dem französischen règle enthalten ist.
Regelflächen finden in der Architektur als leicht modellierbare Flächen Anwendung. Z.B. hat ein Kühlturm oft die Form eines einschaligen Hyperboloids. Im Metallgewerbe werden abwickelbare Regelflächen, wie z.B. Zylinder und Kegel, verwendet. (Das einschalige Hyperboloid ist nicht abwickelbar!) Abwickelbare Flächen haben den praktischen Vorteil, dass man sie aus ihren Abwicklungen aus Blech durch Aufwickeln herstellen kann (s. Abwicklung (Darstellende Geometrie)). Bei der geometrischen Modellierung werden Regelflächen z.B. zur Erzeugung von Coons-Flächen verwendet.
Definition und Parameterdarstellung
Definition
- Eine zweidimensionale differenzierbare Mannigfaltigkeit heißt Regelfläche, wenn sie die Vereinigung einer einparametrigen Geradenschar ist. Die Geraden dieser Schar heißen die Erzeugenden der Regelfläche.
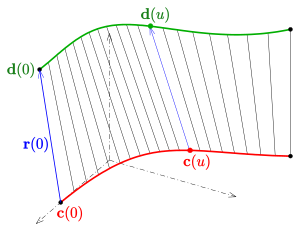
Parameterdarstellung Eine Regelfläche lässt sich durch eine Parameterdarstellung der Form
- (CR)

beschreiben. Jede Flächenkurve  mit festem Parameter
mit festem Parameter  ist eine Erzeugende (Gerade) und die Kurve
ist eine Erzeugende (Gerade) und die Kurve  ist die Leitkurve. Die Vektoren
ist die Leitkurve. Die Vektoren  beschreiben das Richtungsfeld der Erzeugenden.
beschreiben das Richtungsfeld der Erzeugenden.
Die durch die Parameterdarstellung * beschriebene Regelfläche, kann man auch
mit Hilfe der Kurve  als zweite Leitkurve beschreiben:
als zweite Leitkurve beschreiben:
- (CD)

Umgekehrt kann man von zwei sich nicht schneidenden Kurven als Leitkurven
ausgehen und erhält damit die Darstellung einer Regelfläche mit dem
Richtungsfeld 
Bei der Erzeugung einer Regelfläche mit Hilfe zweier Leitkurven (oder einer Leitkurve und eines Richtungsfeldes) ist nicht nur die geometrische Gestalt dieser Kurven von Bedeutung, sondern die konkrete Parameterdarstellung hat wesentlichen Einfluss auf die Gestalt der Regelfläche. Siehe Beispiele d)
Für theoretische Untersuchungen (s.u.) ist die Darstellung (CR)
vorteilhaft, da der Parameter  nur in einem Term vorkommt.
nur in einem Term vorkommt.
Beispiele

a) Senkrechter Kreiszylinder  :
:



Hierbei ist 
b) Senkrechter Kreiskegel  :
:


Hier ist 
Man hätte auch als Leitkurve  ,
also die Spitze des Kegels, und als Richtungsfeld
,
also die Spitze des Kegels, und als Richtungsfeld  wählen können. Bei allen Kegeln kann man als Leitkurve die Spitze wählen.
wählen können. Bei allen Kegeln kann man als Leitkurve die Spitze wählen.
c) Wendelfläche:



Die Leitkurve  ist die z-Achse, das Richtungsfeld
ist die z-Achse, das Richtungsfeld  und die zweite Leitkurve
und die zweite Leitkurve  ist eine Schraublinie.
ist eine Schraublinie.


d) Zylinder, Kegel und Hyperboloide:
Die Parameterdarstellung

besitzt zwei horizontale Einheitskreise als Leitkurven. Der zusätzliche
Parameter  erlaubt es, die Parametrdarstellungen der Kreise zu variieren. Für
erlaubt es, die Parametrdarstellungen der Kreise zu variieren. Für
 erhält man den Zylinder
erhält man den Zylinder  ,
für
,
für erhält man den Kegel
erhält man den Kegel  und für
und für erhält man ein einschaliges Hyperboloid mit der Gleichung
erhält man ein einschaliges Hyperboloid mit der Gleichung  und den Halbachsen
und den Halbachsen  .
.

Falls die Leitlinien in (CD) die Geraden

sind, erhält man
 .
.
Dies ist das hyperbolische Paraboloid, das die 4 Punkte  bilinear interpoliert.
Für das Beispiel der Zeichnung ist
bilinear interpoliert.
Für das Beispiel der Zeichnung ist
 .
.
und das hyperbolische Paraboloid hat die Gleichung  .
.

f) Möbiusband:
Die Regelfläche

mit
 (die Leitkurve ist ein Kreis),
(die Leitkurve ist ein Kreis),
enthält ein Möbiusband.
Die Zeichnung zeigt das Möbiusband für  .
.
Man rechnet leicht nach, dass  ist (s. nächsten Abschnitt). D.h. diese Realisierung eines Möbiusbandes
ist nicht abwickelbar. Es gibt allerdings auch abwickelbare
Möbiusbänder.
ist (s. nächsten Abschnitt). D.h. diese Realisierung eines Möbiusbandes
ist nicht abwickelbar. Es gibt allerdings auch abwickelbare
Möbiusbänder.
Tangentialebenen, abwickelbare Flächen
Für die hier notwendigen Ableitungen wird stets vorausgesetzt, dass sie auch existieren.
Um den Normalenvektor in einem Punkt zu berechnen, benötigt man die
partiellen Ableitungen der Darstellung  :
:
 ,
,

Da das Skalarprodukt  ist (Ein Spatprodukt mit zwei gleichen Vektoren ist immer 0!), ist
ist (Ein Spatprodukt mit zwei gleichen Vektoren ist immer 0!), ist  ein Tangentenvektor in jedem Punkt
ein Tangentenvektor in jedem Punkt  .
Die Tangentialebenen entlang dieser Gerade sind identisch, falls
.
Die Tangentialebenen entlang dieser Gerade sind identisch, falls  ein Vielfaches von
ein Vielfaches von  ist. Dies ist nur möglich, wenn die drei Vektoren
ist. Dies ist nur möglich, wenn die drei Vektoren  in einer Ebene liegen, d.h. linear abhängig sind. Die lineare Abhängigkeit
dreier Vektoren kann man mit Hilfe der Determinante dieser Vektoren feststellen:
in einer Ebene liegen, d.h. linear abhängig sind. Die lineare Abhängigkeit
dreier Vektoren kann man mit Hilfe der Determinante dieser Vektoren feststellen:
- Die Tangentialebenen entlang der Gerade
 sind gleich, falls
sind gleich, falls
-
- Eine Erzeugende, für die dies gilt heißt torsal.

- Eine Regelfläche
ist genau dann in eine Ebene abwickelbar, wenn für alle Punkte die Gauß-Krümmung
verschwindet. Dies ist genau dann der Fall, wenn
-
-
- in jedem Punkt gilt, d.h., wenn jede Erzeugende eine Torsale ist. Eine abwickelbare Fläche heißt deswegen auch Torse.

Eigenschaften einer abwickelbaren Fläche:
- Die Erzeugenden stellen eine Schar von Asymptotenlinien dar. Sie sind auch eine Schar von Krümmungslinien.
- Eine abwickelbare Fläche ist entweder ein (allgemeiner) Zylinder oder ein (allgemeiner) Kegel oder eine Tangentenfläche (Fläche die aus den Tangenten einer Raumkurve besteht).
Anwendung und Geschichte abwickelbarer Flächen
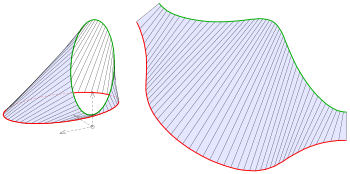
Die Determinantenbedingung für abwickelbare Flächen gibt einem eine Möglichkeit, eine Verbindungstorse zwischen zwei gegebenen Leitkurven numerisch zu ermitteln. Das Bild zeigt ein Beispiel einer Anwendung: Verbindungstorse zwischen zwei Ellipsen (eine horizontal, die andere vertikal) und ihre Abwicklung.
Einen Einblick in die Verwendung von abwickelbaren Flächen im CAD-Bereich findet man in Interactive design of developable surfaces
Einen historischen Überblick über abwickelbare Flächen gibt Developable Surfaces: Their History and Application
Weitere Beispiele
- Die Einhüllende einer einparametrigen Ebenenschar
- Hyperbolisches Paraboloid
- Oloid
- Catalansche Fläche
- Konoid
- Regelschraubflächen
Striktionslinie oder Kehllinie
Definition
Bei einer zylindrischen Regelfläche sind alle Erzeugenden parallel,
d.h. alle Richtungsvektoren  sind parallel und damit
sind parallel und damit  Bei zwei parallelen Geraden haben alle Punkte der einen Gerade denselben Abstand
zur anderen Gerade.
Bei zwei parallelen Geraden haben alle Punkte der einen Gerade denselben Abstand
zur anderen Gerade.
Bei einer nichtzylindrischen Regelfläche sind benachbarte Erzeugenden
windschief
und es existiert ein Punkt auf der einen Gerade, der minimalen Abstand zu der
anderen Gerade hat. In diesem Fall ist  Solch einen Punkt nennt man Zentralpunkt. Die Gesamtheit der
Zentralpunkte bilden eine Kurve, die Striktionslinie oder
Kehllinie oder auch Taille.
Letztere Bezeichnung beschreibt sehr anschaulich die Striktionslinie eines
einschaligen Rotations-Hyperboloids (s.u.).
Solch einen Punkt nennt man Zentralpunkt. Die Gesamtheit der
Zentralpunkte bilden eine Kurve, die Striktionslinie oder
Kehllinie oder auch Taille.
Letztere Bezeichnung beschreibt sehr anschaulich die Striktionslinie eines
einschaligen Rotations-Hyperboloids (s.u.).
- In dem Zentralpunkt einer Erzeugenden nimmt der Betrag der Gausskrümmung ein Maximum an.
Eine zylindrische Fläche besitzt keine Zentralpunkte und damit keine Striktionslinie, oder anschaulich: keine Taille. Bei einer (allgemeinen) Kegelfläche entartet die Striktionslinie/Taille zu einem Punkt, die Kegelspitze.
Parameterdarstellung
In den folgenden Überlegungen wird vorausgesetzt, dass die Regelfläche
nicht zylindrisch und genügend differenzierbar ist, genauer:
 und der Einfachheit halber
und der Einfachheit halber  ist.
ist.
Die letzte Eigenschaft hat den Vorteil, dass  ist, was Rechnungen stark vereinfacht. Bei konkreten Beispielen ist diese
Eigenschaft meist zunächst nicht erfüllt. Was sich aber durch Normierung
korrigieren lässt.
ist, was Rechnungen stark vereinfacht. Bei konkreten Beispielen ist diese
Eigenschaft meist zunächst nicht erfüllt. Was sich aber durch Normierung
korrigieren lässt.
- Zwei benachbarte Erzeugenden


Am Ende der Überlegungen geht dann  .
Deshalb sind die folgenden linearen Approximationen (man ersetzt die Kurve in
der näheren Umgebung durch ihre Tangente) sinnvoll:
.
Deshalb sind die folgenden linearen Approximationen (man ersetzt die Kurve in
der näheren Umgebung durch ihre Tangente) sinnvoll:

 .
.- Abstandsquadrat
Das Quadrat des Abstandes zweier Punkte der Geraden

 ist
ist
- Parameter des Zentralpunktes
Der Abstand wird minimal, wenn die Funktion  minimal wird. Und dies ist der Fall, wenn die 1. partiellen
Ableitungen Null sind:
minimal wird. Und dies ist der Fall, wenn die 1. partiellen
Ableitungen Null sind:




Aus diesem Gleichungssystem für  folgt für
folgt für  :
:

- Parameterdarstellung
Die Parameterdarstellung der Striktionslinie ist also

- Doppelte Regelflächen
Sowohl auf dem einschaligen Hyperboloid als auch auf dem hyperbolischen Paraboloid liegen zwei Scharen von Geraden. Zu jeder Schar gehört eine Striktionslinie. Beim einschaligen Rotations-Hyperbolod fallen die zwei Striktionslinien zusammen.
Beispiele
- 1) Einschaliges Rotations-Hyperboloid

Die Zentralpunkte haben alle den Parameter  ,
d.h. die Striktionslinie ist der Einheitskreis in der x-y-Ebene.
,
d.h. die Striktionslinie ist der Einheitskreis in der x-y-Ebene.

- 2) Gerades Konoid
Bei einem geraden Konoid ist die Achse das gemeinsame Lot aller Erzeugenden. (Es gilt allgemein: Ein Punktepaar zweier windschiefer Geraden hat den kürzesten Abstand, wenn seine Verbindung das gemeinsame Lot der Geraden ist.) Also gilt für gerade Konoide
- Die Achse eines geraden Konoids ist auch seine Striktionslinie.
Beispiele von geraden Konoiden sind das hyperbolische Paraboloid
und die Wendelfläche.

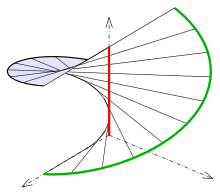
- 3) Torse
Jede vom allgemeinen Zylinder und Kegel verschiedene abwickelbare Regelfläche
(Torse) ist eine Tangentenfläche, d.h. die Gesamtheit der Erzeugenden der
Regelfläche besteht aus der Schar der Tangenten einer vorgegebenen Kurve  .
(Im Bild ist die Kurve eine Schraublinie. Dadurch entsteht eine Schraubtorse.)
Allgemein gilt
.
(Im Bild ist die Kurve eine Schraublinie. Dadurch entsteht eine Schraubtorse.)
Allgemein gilt
- Die Striktionslinie einer durch eine Kurve
erzeugte Tangentenfläche ist die Kurve
selbst.
- 4) Möbiusband

Für die oben angegebene Beschreibung eines Möbiusbandes ist
-
,

(Zum Bild: Damit die Striktionslinie völlig auf der dargestellten Fläche
liegt, wurde das Band verbreitert.) Der Richtungsvektor  ist in diesem Fall schon ein Einheitsvektor, was die Rechnung wesentlich
vereinfacht.
ist in diesem Fall schon ein Einheitsvektor, was die Rechnung wesentlich
vereinfacht.
Für den Parameter des jeweiligen Zentralpunktes ergibt sich  und schließlich die Parameterdarstellung der Striktionslinie
und schließlich die Parameterdarstellung der Striktionslinie

Man erkennt leicht, dass diese Kurve in der Ebene  liegt. Um zu zeigen, dass diese ebene Kurve sogar
liegt. Um zu zeigen, dass diese ebene Kurve sogar
- eine Ellipse mit Mittelpunkt
 und den Halbachsen
und den Halbachsen  ist,
ist,
zeigt man, dass die x- und y-Koordinaten die Gleichung  erfüllen. Also ist der Grundriss der Striktionslinie eine Ellipse und damit die
Striktionslinie als Parallelprojektion auch.
erfüllen. Also ist der Grundriss der Striktionslinie eine Ellipse und damit die
Striktionslinie als Parallelprojektion auch.
Die Striktionslinie lässt sich einfacher durch die Parameterdarstellung
 mit
mit
beschreiben (s. Ellipse).
Zusammensetzung von Regelflächen
Man kann je zwei abwickelbare Regelflächen längs einer Geraden  bzw.
bzw.  abschneiden und sie so zusammensetzen, dass aus
und
eine gemeinsame Gerade der zusammengesetzten Fläche mit einer neuen gemeinsamen
Tangentialebene von dieser wird.
abschneiden und sie so zusammensetzen, dass aus
und
eine gemeinsame Gerade der zusammengesetzten Fläche mit einer neuen gemeinsamen
Tangentialebene von dieser wird.
Bei einer nicht abwickelbaren und einer abwickelbaren Regelfläche ist die so zusammengesetzte Fläche längs der gemeinsamen Erzeugenden nicht differenzierbar. Die gemeinsame Erzeugende ist als Kante sichtbar, wobei die Kante an verschiedenen Punkten der Erzeugenden verschieden deutlich hervortritt. Bei zwei nicht abwickelbaren Regelflächen kann die so zusammengesetzte Fläche längs der gemeinsamen Erzeugenden differenzierbar sein, ist es im Allgemeinen aber nicht.
Außermathematische Anwendung
Regelflächen können nicht nur in der Mathematik, sondern auch außerhalb davon in Konstruktionen und Ingenieursarbeit verwendet werden. Ein gutes Beispiel hierfür ist die Arbeit des Architekten/Mathematikers Antoni Gaudí. Das Gewölbe der La Sagrada Família beschreibt hierbei mehrere Hyperboloide, hyperbolische Paraboloide und Helikoide.
Literatur
- Manfredo P. do Carmo: Differentialgeometrie von Kurven und Flächen. Springer-Verlag, 2013, ISBN 978-3-322-85494-0.
- H. Schmidbauer: Abwickelbare Flächen: Eine Konstruktionslehre für Praktiker. Springer-Verlag, 2013, ISBN 978-3-642-47353-1


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 10.04. 2023