Side-Looking-Airborne-Radar
.png)
β = Einfalls- oder Inzidenzwinkel (engl: incidence angle),
ε = Depressionswinkel (engl: depression angle), durch
die Erdkrümmung ungleich dem Streifwinkel γ
θ = 90° - ε = Betrachtungswinkel (engl.: look angle oder
off-nadir angle)
γ = Streifwinkel (engl.: grazing angle)
ϑ = ε + 90° = Winkel für die Nutzung in Kugelkoordinaten
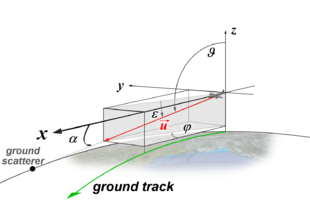
α = Konuswinkel (engl.: cone angle)
φ = Seitenwinkel (engl.: azimuth angle),
stellt die Projektion von α auf die Erdoberfläche dar.
Side Looking Airborne Radar (SLAR, deutsch luftgestütztes Seitensichtradar) bezeichnet eine Gruppe bildgebender Radar-Verfahren zur Fernerkundung. Von einer bewegten Plattform aus (zum Beispiel Flugzeug oder Satellit) detektiert ein Radar seitlich zur Bewegungsrichtung sequentiell die überflogene Landschaft. SLAR war ehemals der Oberbegriff aller nicht als Bugradar (Forward Looking Radar) oder Radaraltimeter genutzten luft- oder weltraumgestützten Radargeräte, wird aber seit der Einführung des Synthetic Aperture Radar (SAR) nur noch in historischen Betrachtungen über SAR verwendet und bezeichnet dort Radar mit realer Apertur (RAR).
Das SLAR wurde etwa 1951 für militärische Zwecke entwickelt. Es wurde ab 1960 für zivile Zwecke (Fernerkundung der Erdoberfläche) eingesetzt. Die Weiterentwicklung zum SAR wurde erstmals 1952/53 beschrieben und gelangte Mitte der 1950er Jahre zur Einsatzreife. Es wird meist eine synthetische Apertur (SAR) mit intrapulsmodulierten Sendeimpulsen verwendet. Spezielle Anwendungen können auch die gegenüber dem Impulsradar wesentlich genaueren Messmethoden eines frequenzmodulierten Dauerstrichradars einsetzen.
Grundlagen
Geometrie
Das SLAR hat eine günstigere Ausleuchtung der Szenerie als ein Bodenradar. Das Radar blickt schräg von oben mit dem Blick- oder Betrachtungswinkel θ (engl.: looking angle) seitlich auf das zu vermessende Areal. Die Blickrichtung ist oft genau senkrecht zur Flugrichtung, jedoch ist auch ein squinted mode – ein „schielender Blick“ abweichend vom rechten Winkel möglich. In diesem Fall wird der Winkel α gemessen, der Konuswinkel genannt wird aufgrund seiner Bedeutung für die Dopplerfrequenz des Echosignals. Hier wird in der Literatur manchmal auch ein Schielwinkel θsq (engl.:squint angle) genannt, der sich mit θsq = 90° - α ergibt. Die Projektion des Konuswinkels auf die Erdoberfläche ist der Seitenwinkel φ (engl.: azimuth angle).
Die Messungen erfolgen wie bei jedem Radar üblich, zunächst in Kugelkoordinaten: als
Seitenwinkel oder Azimut (als Funktion der Richtwirkung
der Antenne) und einer Schrägentfernung (als Funktion der Laufzeitmessung des
Echosignals) in einem festgelegten Höhenwinkel ϑ. Beide Messgrößen sind
bezogen auf den momentanen Standort der Trägerplattform und müssen in ein kartesisches
Koordinatensystem umgerechnet werden. Dieses Koordinatensystem hat seinen
Ursprung in der Radarantenne (genauer: in dessen Phasenzentrum) und liegt mit
seiner X-Achse auf dem Flugweg der Trägerplattform. Lotrecht dazu steht die
Z-Achse als Richtung zur Messung der Flughöhe.
Dabei zeigt der Einheitsvektor  von der Antenne zum reflektierenden Objekt (hier ground scatterer
genannt).
von der Antenne zum reflektierenden Objekt (hier ground scatterer
genannt).
Bei der Umrechnung der Folge der gemessenen Echosignale in ein Abbild der ausgeleuchteten Fläche treten abhängig vom Blickwinkel Verzerrungen auf, die durch aufwändige Verfahren kompensiert werden müssen.
Dynamik der Empfangssignale
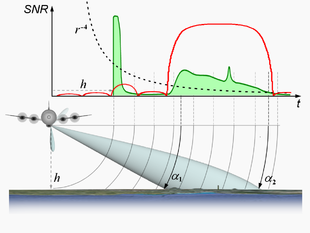
Die Stärke des Echosignals ist abhängig von der Zweiwegdämpfung (r−4–Abhängigkeit – siehe Radargleichung) und dem Antennendiagramm. Beide Einflüsse bewirken eine grob sägezahnförmige Amplitudenmodulation der Echos in der Hauptkeule. Im Nahbereich liegende reflektierende Objekte oder Flächen liefern deutlich stärkere Echosignale als Objekte im Fernbereich. Einer Vergrößerung der beleuchteten Fläche mit zunehmender Entfernung (etwa nach dem Modell eines sogenannten Volumenzieles beim Wetterradar) wirkt jedoch eine schlechtere Rückstrahlung (Retroreflexion) durch den verkleinerten Streifwinkel γ sowie eine Verringerung der Leistungsdichte am Ort der Reflexion um den Faktor 1/cosγ entgegen.
Das erste Echosignal auf der Zeitachse ist immer der sogenannte „Nadir-Return“. Obwohl der Fußpunkt (Nadir) nicht durch das Antennendiagramm abgedeckt wird, bildet dieser Nadir aufgrund der geringeren Zweiwegdämpfung und des erhöhten Anteils spiegelnder Reflexion ein sehr starkes Echosignal, welches meist durch Nebenkeulen empfangen wird. Die zeitliche Verzögerung zum Sendeimpuls ist das Maß für die aktuelle Flughöhe des Flugzeuges.
Ortsauflösungsvermögen
Der seitliche Blick erlaubt, die von der Senderbandbreite B der Radarimpulse bestimmte, gute Entfernungsauflösung in eine horizontale Auflösung am Boden umzusetzen. Das Auflösungsvermögen in der radialen Richtung (quer zur Flugrichtung) ist abhängig vom Streifwinkel γ: Je steiler das Radar abwärts blickt, desto schlechter wird die Auflösung in dieser Richtung am Boden. (Nur bei SLAR in Flugzeugen mit geringer bis mittlerer Flughöhe und bei ebener Ausleuchtungszone kann der Streifwinkel unter Vernachlässigung der Erdkrümmung dem Depressionswinkel ε gleichgesetzt werden.) Das Entfernungsauflösungsvermögen δg bezogen auf die Erdoberfläche wird berechnet gemäß:
 mit c0 als der
Lichtgeschwindigkeit im freien Raum.
mit c0 als der
Lichtgeschwindigkeit im freien Raum.
Ein größerer Blickwinkel verbessert diesen Wert auf Kosten schlechterer Auflösung in Flugrichtung, schwächerer Echosignale durch die größere Schrägentfernung und möglichen Schattenwurfs in steilem Terrain. Da die Reflexionen der einzelnen Punkte auf dem Boden in Abhängigkeit von der Schrägentfernung zu unterschiedlichen Zeitpunkten wieder an der Radarantenne eintreffen, muss das Antennendiagramm nicht geschwenkt werden, um eine Entfernungsauflösung zu erzielen. Die zeitliche Reihenfolge enthält allerdings durch die Höhenunterschiede am Boden starke Verzerrungen.
Quer zur Blickrichtung (in Azimut, oder engl.: cross range) hängt das Auflösungsvermögen im Wesentlichen von der Richtwirkung der Antenne sowie von der Schrägentfernung r (slant range) ab. Sie ist beim SLAR ein wenig besser als die Breite der Ausleuchtungszone (siehe die dritte Grafik). Die Richtwirkung wird aufgeschlüsselt durch die Halbwertsbreite (−3 dB Öffnungswinkel) der Antenne, der annähernd gleich dem Verhältnis des Durchmessers der realen Apertur D der Radarantenne zu der benutzten Wellenlänge λ ist:

Das heißt, bei einem SLAR ist die cross range-Auflösung δcr abhängig von der Schrägentfernung r. Je größer die Flughöhe ist und je flacher das Radar blickt, desto schlechter wird das Auflösungsvermögen eines SLAR mit realer Apertur (RAR). Für Satelliten ist das RAR aufgrund dieser Beschränkung nur bedingt geeignet.
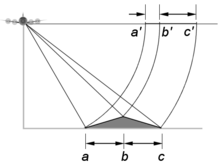
Verzerrungen
Eine grundsätzliche nichtlineare Verzerrung entsteht in der Entfernungsanzeige durch die Messung einer Schrägentfernung und der notwendigen Projektion dieser in eine entsprechende maßstabsgerechte Darstellung der Entfernung am Boden. In älteren Sichtgeräten, die das Bild in Echtzeit dargestellt haben, wurde das durch eine nichtlineare Auslenkungsgeschwindigkeit des Kathodenstrahls der Bildröhre annähernd erreicht. Diese Technologie funktioniert aber nur unter der Annahme, dass eine ebene Fläche ohne wesentliche Höhenunterschiede vorliegt.
Bedingt durch den Betrachtungswinkel (oder komplementär dazu dem Depressionswinkel, der meist zwischen 10 und 50° liegt), enthalten die Messungen der Schrägentfernung einen Fehler durch unterschiedliche Geländehöhen. Zum SLAR hin geneigte Geländeflächen werden im Abbild der Geländeoberfläche verkürzt wiedergegeben. Höher gelegene Geländepunkte werden zum Ursprung des Koordinatensystems hin versetzt dargestellt. Dadurch tritt bei den zum SLAR hin orientierten Hängen eine Verkürzung (engl. foreshortening) auf. Ist die Hangneigung größer als der Depressionswinkel, so geht die Verkürzung in eine Überlagerung (engl. layover) über: Der Gipfel wird im Abbild noch vor dem Fuß des Hügels dargestellt. Hinter den vom Radar abgeneigten Hängen kann eine Schattenbildung auftreten, in der durch das Radar keine Information erhältlich ist und in deren Bereich nur Rauschen empfangen wird. Eine sehr einfache trigonometrische Methode der Berechnung einer relativen Höhe ist, die Länge des Schattens mit dem Tangens des Depressionswinkels zu multiplizieren.
Aufgrund des schlechten Auflösungsvermögens beim RAR haben diese Verzerrungen praktisch erst bei SAR eine größere Bedeutung und werden dort mit einem speziellen Fast-Delivery (FD)- Algorithmus bei der Erstellung des Abbildes korrigiert. Gravierende Abweichungen können nach mehrmaligem Überfliegen und dem Vergleich der Daten aus verschiedenen Depressionswinkeln korrigiert werden. Durch Parallelbefliegung können auch Stereobildpaare erzeugt werden, die ein rechnerisches Korrigieren der Verzerrungen durch eine Ansicht des gleichen Objektes unter verschiedenen Depressionswinkeln ermöglichen.
Bezeichnungen im Zusammenhang mit SLAR-Verfahren
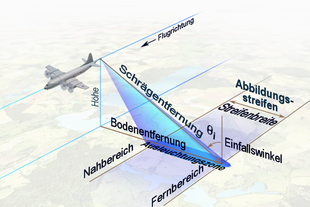
Die Abbildung rechts zeigt ein SLAR, das sich in Flughöhe h über Grund mit einem Flugzeug bewegt.
- Ausleuchtungszone (englisch footprint)
- Blickfeld der Antenne am Boden (in der Abb. die blaue Fläche der Ellipse).
- Abbildungsstreifen, Schwad (englisch swath)
- von der Antenne im Überflug erfasstes Gebiet (in der Abb. das graublaue Band). Echos aus dem Nahbereich werden vor den Echos aus dem Fernbereich empfangen.
- Schrägentfernung (englisch slant range)
- radiale Entfernung r zum Aufpunkt (Reflexionspunkt). Die gemessenen Schrägentfernungen werden auf eine radiale Linie projiziert und diese auf die Y-Achse gedreht. Durch unterschiedliche lokale Streifwinkel entstehen dabei nichtlineare Verzerrungen.
- Fußpunkt (Nadir)
- Punkt am Boden lotrecht unter dem Phasenzentrum der Radarantenne.
- Bodenentfernung (englisch ground range, true range)
- Abstand Fußpunkt–Aufpunkt. Die Bodenentfernung wird aus der Schrägentfernung berechnet. Eventuelle Höhenunterschiede ergeben vorerst einen Messfehler.
- Bodenspur, Nadirlinie (englisch ground track)
- Projektion der Flugbahn auf den Boden.
Weiterentwicklungen
High PRF Mode

Um die Energiebilanz des Radars (und somit dessen Reichweite) und gleichzeitig die Datenerneuerungsrate zu verbessern, wird meist der High PRF Mode verwendet. Hier wird auf Kosten der Eindeutigkeit der Messentfernung eine sehr hohe Impulsfolgefrequenz genutzt. Die Impulsperioden sind wesentlich kürzer als die notwendige Laufzeit der Impulse. Zwischen dem Radar und der darzustellenden Erdoberfläche sind also mehrere Sendeimpulse gleichzeitig unterwegs. Die Messergebnisse der Laufzeit sind „gefaltet“, in einer Impulsperiode werden also die Echos aus mehreren vorangegangenen Impulsperioden empfangen.
Dieser Mode ist möglich, da auf dem Weg vom Radar zur Erdoberfläche kaum darzustellende Hindernisse auftreten. Zusätzlich werden (als Erkennungsmerkmal für die Einzelimpulse) mit dem Pulskompressionsverfahren bis zu drei unterschiedliche Impulsmodulationen mit oft sieben unterschiedlichen Längen der Impulsperiode verwendet. So kann die Software die Echosignale „entfalten“, also ihrem ursprünglichen Sendeimpuls zuordnen, und eine eindeutige Entfernungsbestimmung ermöglichen. Als Nebeneffekt können jetzt keine Mehrdeutigkeiten in der Dopplerfrequenz mehr auftreten, da solche Mehrdeutigkeiten an eine kleine Impulsfolgefrequenz gebunden sind. Nachteilig ist, dass nun Verluste von 1 bis 2 dB auftreten, ein sogenanntes eclipsing loss, weil der Empfänger bei vielen Duplexerarten im Sendemoment abgeschaltet ist und die während dieser Zeit eintreffenden Echosignale nicht verarbeitet werden können.
Doppler Beam Sharpening (DBS)
Verbesserungen in der Azimut- oder cross range- Auflösung erzielt man mit der Auswertung der Dopplerfrequenz, dem sogenannten Doppler Beam Sharpening. Da das Radar in dem System der Bezugspunkt ist, haben ortsfeste Reflektoren eine radiale Geschwindigkeit zur Radarplattform. Die Größe der Doppler-Verschiebung ihrer Echos ist abhängig vom Winkel zwischen Sichtlinie und Flugrichtung. Quer zur Flugrichtung tritt kein Doppler-Effekt auf, da die Radialgeschwindigkeit gleich Null ist. Durch schmalbandige Filterung kann man innerhalb der Antennenkeule mehrere Winkel unterscheiden, was die Auflösung in Flugrichtung entsprechend steigert. Die effektive Apertur der Antenne ist die während dieser Dauer zurückgelegte Flugstrecke. Raumsonden auf hochelliptischen Umlaufbahnen eignen sich aufgrund ihrer hohen Fluggeschwindigkeit in der Periapsis besonders für dieses Verfahren. So kartierten 1983/4 die Sonden Venera 15 und 16 Teile der Venus-Oberfläche mit einer Auflösung von nur einem Kilometer. Dieses Verfahren ist erst ab einem seitlichen Winkel effektiv, der mehr als 15° von der Flugrichtung abweicht. Das DBS-Verfahren wird noch in Bugradargeräten eingesetzt, die einen Sektor-PPI-Bildschirm verwenden und verbessert dort die Winkelauflösung des Radars von (z.B. bei einer X-Band- Parabolantenne) von 4° auf 0,5°.
Das Filterverfahren DBS wurde im Rückblick als SAR-Verfahren erkannt und wird nun manchmal als inkohärentes SAR bezeichnet (obwohl moderne Bugradare, die dieses Verfahren anwenden, mittlerweile ebenfalls voll kohärent arbeiten), das klassische SLAR als RAR (Radar mit Realer Apertur).
Synthetic Aperture Radar (SAR)
Das SAR verwendet eine relativ kleine Antenne als Einzelstrahler und speichert die kompletten Impulsperioden der Echosignale. Später wird aus diesen Einzelperioden ein scharfes Bild errechnet, welches eine sehr viel höhere Auflösung hat als das Real Aperture Radar mit einer relativ großen Antenne. Es werden
- unfocused SAR
- – nicht fokussiertes SAR – (als durch die vormals begrenzte Rechenleistung bedingt) und
- focused SAR
- – fokussiertes SAR –
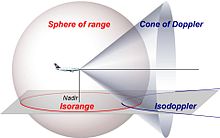
unterschieden, wobei das focused SAR eine durch Laufzeitunterschiede notwendige entfernungsabhängige Phasenkorrektur der Echosignale vornehmen kann. Die azimutale (cross range) Auflösung ist bei dem klassischen SAR Verfahren nur noch abhängig von der synthetischen Aperturlänge und somit unabhängig von der Schrägentfernung r und der Wellenlänge λ. Heutzutage wird unter dem Begriff SAR nur noch das focused SAR verstanden. Für eine sehr genaue Richtungsbestimmung werden die Schnittpunkte der Linien gleicher Entfernungsmessung (Isoranges) und gleicher Dopplerfrequenz (Iso-Doppler oder Isodops) verwendet.
Die Verbesserungen im Auflösungsvermögen würden unter Verwendung der gleichen Radarantenne, des gleichen Senders und Empfängers nur durch eine andere Software im Radardatenprozessor (RDP) erzielt. In der Literatur werden für diese verschiedenen Radarverfahren die in der Tabelle zusammengefassten theoretisch erzielbaren Auflösungsvermögen angegeben:
Rahmenbedingungen für die Tabelle:
- r = 100 km, Schrägentfernung für eine extrem niedrig angenommene Flughöhe eines Satelliten.
- γ = 30°, Streifwinkel (cosγ ≈ 0,866)
- λ ≈ 3 cm, Wellenlänge für ein Radar im X-Band
- D = 2 m, Durchmesser der Antenne mit realer Apertur
Fluggeschwindigkeit 180 m/s, Länge der synthetischen Apertur unter diesen Bedingungen im stripmap-mode etwa 750 m, im spot-light-mode etwa 5000 m.
| Verfahren | Azimutales Auflösungsvermögen |
|---|---|
| SLAR (RAR) | 1500 m |
| Doppler Beam Sharpening (DBS) | 150 m |
| SAR[Anm. 1] (nicht fokussiert) | 27 m |
| SAR[Anm. 1] (fokussiert) | 1 m |
| Spotlight SAR | 0,3 m |
Die möglichen Verbesserungen durch SAR betreffen nicht das Auflösungsvermögen in der Entfernung (in radialer Richtung). Hier ist das Auflösungsvermögen durch die Bandbreite des Sendesignals begrenzt. Um eine gute Energiebilanz bei gleichzeitiger guter Entfernungsauflösung bei einem Radargerät zu erzielen, wird das Pulskompressionsverfahren verwendet. Für eine Senderbandbreite von 100 MHz (entspricht etwa 1 % der Sendefrequenz) wird theoretisch eine Entfernungsauflösung von 1,5 m möglich. Durch die schräge Blickrichtung mit den obigen Winkeln ergibt das ein Auflösungsvermögen von etwa 1,7 m am Boden. Oft werden die Parameter des SAR danach gewählt, auch im Azimutbereich ein vergleichbares Auflösungsvermögen zu erreichen um in der bildlichen Darstellung ein annähernd quadratisches Pixel auszufüllen, welches range bin genannt wird. Die Größe dieses range bins wird meist mit etwa der Hälfte des Auflösungsvermögen festgelegt um auch dann eine scharfe Darstellung zu erhalten, wenn ein Objekt in der Größenordnung des Auflösungsvermögens genau zwischen zwei range bins fällt. In der Radarsignalverarbeitung sind dann die Speicherkapazitäten auf diese range bin- Größe ausgerichtet.
Auswertungen der Dopplerfrequenz sind durch deren Abhängigkeit von der Sendefrequenz nur möglich, wenn die Dopplerfrequenz bei einer Nutzung eines linear frequenzmodulierten Sendeimpulses „normalisiert“ wird, also diese Frequenzabhängigkeit durch Division mit der aktuellen Sendefrequenz entfernt wird. Dieses Verfahren wird auch de-ramping genannt.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 07.04. 2023