Konvexitätsbedingung
In der mathematischen Theorie der normierten Räume werden gewisse Klassen normierter Räume durch Eigenschaften der Einheitskugel definiert. Hier betrachten wir Konvexitätsbedingungen, die die Konvexität der Einheitskugel verschärfen. Deren Ursprünge liegen in den 1930er Jahren, hier sind vor allem James A. Clarkson sowie Mark G. Krein und Naum I. Achijeser für grundlegende Begriffsbildungen zu nennen.
Daneben gibt es eine Reihe von Glattheitsbedingungen, die Differenzierbarkeitseigenschaften der Norm untersuchen. Über die Dualräume besteht eine enge Beziehung zwischen Konvexitätsbedingungen und Glattheitsbedingungen.
Konvexitätsbedingungen
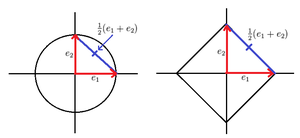
 im Fall der Summennorm (rechts) gleich 1, im Falle der euklidischen Norm (links)
ist die Konvexitätsungleichung strikt.
im Fall der Summennorm (rechts) gleich 1, im Falle der euklidischen Norm (links)
ist die Konvexitätsungleichung strikt.Es sei  ein normierter Raum. In Formeln bedeutet die Konvexität der Einheitskugel
ein normierter Raum. In Formeln bedeutet die Konvexität der Einheitskugel
- Für je zwei Vektoren
 mit
mit  und
und ![t\in [0,1]](/svg/31a5c18739ff04858eecc8fec2f53912c348e0e5.svg) gilt
gilt  .
.
Dies schließt nicht aus, dass in vielen Fällen Gleichheit auch für
verschiedene Vektoren und für  besteht, wie es zum Beispiel bei einem Quadrat als Einheitskugel vorliegt. Indem
man das ausschließt oder noch stärkere Bedingungen stellt, kommt man zu den im
Folgenden vorgestellten Raumklassen. Zur einfacheren Formulierung sei
stets ein normierter Raum mit
besteht, wie es zum Beispiel bei einem Quadrat als Einheitskugel vorliegt. Indem
man das ausschließt oder noch stärkere Bedingungen stellt, kommt man zu den im
Folgenden vorgestellten Raumklassen. Zur einfacheren Formulierung sei
stets ein normierter Raum mit
- Einheitskugel

- und Einheitssphäre
 .
.
Um Triviales auszuschließen, sei  nicht der Nullraum
nicht der Nullraum
 sei der Dualraum mit der durch
sei der Dualraum mit der durch  definierten Dualraumnorm.
definierten Dualraumnorm.
Strikt konvexe Räume
Will man die Gleichheit in der Konvexitätsformel weitestgehend ausschließen, also sicherstellen, dass die Einheitssphäre keine Strecken enthält, so führt dies zwanglos zu folgender Definition:
heißt strikt konvex, falls gilt:
- Sind
 verschieden und ist ,
so ist
verschieden und ist ,
so ist  .
.
Gleichmäßig konvexe Räume
Indem man kontrolliert, wie gut die Ungleichung in der Definition des strikt konvexen Raums erfüllt ist, kommt man zu folgendem Begriff:
heißt gleichmäßig konvex, falls gilt:
- Für jedes
 ist
ist  .
.
Lokal gleichmäßig konvexe Räume
Die Bedingung in der Definition der gleichmäßigen Konvexität gilt gleichmäßig
für alle  .
Indem man einen Vektor fest hält und das Infimum nur noch über den
anderen bildet, erhält man folgende lokale Version:
.
Indem man einen Vektor fest hält und das Infimum nur noch über den
anderen bildet, erhält man folgende lokale Version:
heißt lokal gleichmäßig konvex, falls gilt:
- Für jedes
und jedes
 ist
ist  .
.
Schwach gleichmäßig konvexe Räume
In der Definition der gleichmäßigen Konvexität kann die Bedingung  in der Menge, über die das infimum gebildet wird, zu
in der Menge, über die das infimum gebildet wird, zu  abgeschwächt werden, wobei
abgeschwächt werden, wobei  ist, also aus der Einheitssphäre des Dualraums stammt.
ist, also aus der Einheitssphäre des Dualraums stammt.
heißt schwach gleichmäßig konvex, falls gilt
- Für jedes
und
ist
 .
.
Lokal schwach gleichmäßig konvexe Räume
Die Bedingung in der Definition der schwach gleichmäßigen Konvexität lässt sich wieder zu einer lokalen Version abschwächen:
heißt lokal schwach gleichmäßig konvex, falls gilt:
- Für jedes ,
und
ist
 .
.
Lokal gleichmäßig mittelpunktskonvexe Räume
Aus der gleichmäßigen Konvexität folgt, dass für zwei Folgen  und
und  in
in  ,
für die die Norm der Folge der Mittelpunkte
,
für die die Norm der Folge der Mittelpunkte  gegen 1 konvergiert,
gegen 1 konvergiert,  gelten muss. Diese Bedingung lässt sich durch die Forderung, dass die Folge der
Mittelpunkte tatsächlich gegen ein Element der Einheitssphäre konvergieren muss,
abschwächen:
gelten muss. Diese Bedingung lässt sich durch die Forderung, dass die Folge der
Mittelpunkte tatsächlich gegen ein Element der Einheitssphäre konvergieren muss,
abschwächen:
heißt lokal gleichmäßig mittelpunktskonvex, falls gilt:
- Sind
und
Folgen in
und konvergiert
 ,
so gilt .
,
so gilt .
In jeder Richtung gleichmäßig konvexe Räume
Eine weitere Verallgemeinerung ergibt sich, wenn man nur dann auf
schließen kann, wenn die Differenzen  alle dieselbe Richtung haben.
alle dieselbe Richtung haben.
heißt gleichmäßig konvex in Richtung  ,
falls gilt:
,
falls gilt:
- Sind
und
Folgen in
und konvergiert
und ist
 für alle
für alle  ,
so gilt .
,
so gilt .
heißt in jeder Richtung gleichmäßig konvex oder auch UCED-Raum, wenn
für alle
gleichmäßig konvex in Richtung  ist.
ist.
Stark konvexe Räume

Um wie in der Verschärfung der Konvexität zur strikten Konvexität zu
erreichen, dass die Einheitssphäre keine Strecken erhält, kann man Durchschnitte
der Kugeln  mit Radius
mit Radius  mit einer konvexen Menge
mit einer konvexen Menge  betrachten und fordern, dass der Durchmesser
betrachten und fordern, dass der Durchmesser
 der nicht-leeren Durchschnitte mit fallendem Radius gegen 0 geht.
der nicht-leeren Durchschnitte mit fallendem Radius gegen 0 geht.
heißt stark konvex, falls gilt:
- Für jede konvexe Menge
 gilt
gilt  für
für  .
.
Schwach* gleichmäßig konvexe Räume
Obige Abschwächung der gleichmäßigen Konvexität unter Benutzung der schwachen Topologie kann auf dem Dualraum mit der schwach-*-Topologie formuliert werden:
Der Dualraum  heißt schwach* gleichmäßig konvex, falls gilt:
heißt schwach* gleichmäßig konvex, falls gilt:
- Für jedes
und
ist
 .
.
Übersicht
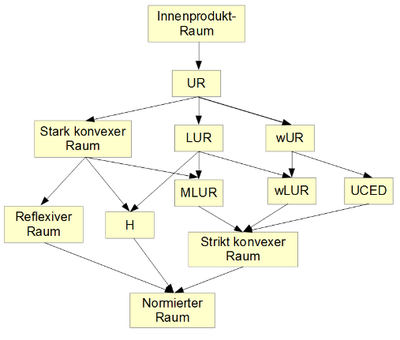
Dieses Diagramm gibt eine Übersicht über die Zusammenhänge zwischen den Raumklassen, wobei die Klasse der Innenprodukt-Räume die speziellste ist. Ein Pfeil von einer Klasse in die andere bedeutet, dass jeder normierte Raum der ersten Klasse auch der zweiten angehört. Die Reflexivität eines normierten Raums bedeutet, dass die Vervollständigung ein reflexiver Raum ist. Man beachte, dass mit Ausnahme der Reflexivität und natürlich der untersten Eigenschaft, ein normierter Raum zu sein, jede der Eigenschaften beim Übergang zu einer äquivalenten Norm verloren gehen kann. Folgende Standard-Abkürzungen, die zum Teil auf die entsprechenden englischen Bezeichnungen zurückgehen, wurden verwendet:
- UR: gleichmäßig konvex (uniformly rotund)
- LUR: lokal gleichmäßig konvex (locally uniformly rotund)
- wUR: schwach gleichmäßig konvex (weakly uniformly rotund)
- MLUR: lokal gleichmäßig mittelpunktskonvex (midpoint locally uniformly rotund)
- UCED: in jede Richtung gleichmäßig konvex (uniformly convex in each direction)
- wLUR: schwach lokal gleichmäßig konvex (weakly locally uniformly rotund)
- H: Radon-Riesz-Eigenschaft (keine englische Abkürzung)
Dualräume
Viele der hier vorgestellten Konvexitätsbedingungen entsprechen Glattheitsbedingungen auf dem Dualraum. Die hier geltenden Beziehungen sind im Artikel zu den Glattheitsbedingungen zusammengestellt.
Konvexitätsmodul
Für einen normierten Raum
heißt die Abbildung
![\delta _{X}:[0,2]\rightarrow [0,1],\delta _{X}(t):=\inf\{1-{\frac {1}{2}}\|x+y\|;\,x,y\in E,\|x\|\leq 1,\|y\|\leq 1,\|x-y\|=t\}](/svg/8f33c9d9264d87f1239c47707014c75e459a3be3.svg)
der Konvexitätsmodul. Dieser ist eine monoton wachsende Funktion, die
in 0 den Wert 0 hat, sogar die Abbildung  ist monoton wachsend.
Damit können zwei Räume bezüglich ihrer Konvexitätseigenschaften verglichen
werden; man kann einen Raum
konvexer als einen Raum
ist monoton wachsend.
Damit können zwei Räume bezüglich ihrer Konvexitätseigenschaften verglichen
werden; man kann einen Raum
konvexer als einen Raum  nennen, wenn
nennen, wenn  für alle
für alle ![t\in [0,2]](/svg/a95856cb0577d0ba62b6a8938b7b4425ad5f61e6.svg) .
.
Ein normierter Raum
ist genau dann gleichmäßig konvex, wenn  für alle
für alle  .
.
Für den Folgenraum  der Nullfolgen mit der Supremumsnorm
gilt offenbar
der Nullfolgen mit der Supremumsnorm
gilt offenbar
 für alle ,
für alle ,
denn für  und jedes
ist
und jedes
ist
 und daher
und daher .
.
Für einen Hilbertraum
 folgt unter Verwendung der Parallelogrammgleichung
folgt unter Verwendung der Parallelogrammgleichung
 für alle
für alle
und es gilt
 für alle gleichmäßig konvexen Räume .
In diesem Sinne sind die Hilberträume die "konvexesten" Räume.
für alle gleichmäßig konvexen Räume .
In diesem Sinne sind die Hilberträume die "konvexesten" Räume.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 15.04. 2021