Turingmaschine
Eine Turingmaschine ist ein wichtiges Rechnermodell der theoretischen Informatik. Eine Turingmaschine modelliert die Arbeitsweise eines Computers auf besonders einfache und mathematisch gut zu analysierende Weise. Sie ist benannt nach dem Mathematiker Alan Turing, der sie 1936 einführte.
Turingmaschinen machen die Begriffe des Algorithmus und der Berechenbarkeit mathematisch fassbar, das heißt, sie formalisieren diese Begriffe. Im Gegensatz zu einem physischen Computer ist eine Turingmaschine damit ein mathematisches Objekt und kann mit mathematischen Methoden untersucht werden.
Eine Turingmaschine repräsentiert einen Algorithmus bzw. ein Programm. Eine Berechnung besteht dabei aus schrittweisen Manipulationen von Symbolen bzw. Zeichen, die nach bestimmten Regeln auf ein Speicherband geschrieben und auch von dort gelesen werden. Ketten dieser Symbole können verschieden interpretiert werden, unter anderem als Zahlen. Damit beschreibt eine Turingmaschine eine Funktion, welche Zeichenketten, die anfangs auf dem Band stehen, auf Zeichenketten, die nach „Bearbeitung“ durch die Maschine auf dem Band stehen, abbildet. Eine Funktion, die anhand einer Turingmaschine berechnet werden kann, wird Turing-berechenbar oder auch einfach berechenbar genannt.
Turingmaschinen spielen auch eine bedeutende Rolle bei der Akzeptanz von formalen Sprachen. So entsprechen die Sprachen, die von Turingmaschinen akzeptiert werden, den mit Typ-0-Grammatiken definierbaren Sprachen.
Informelle Beschreibung
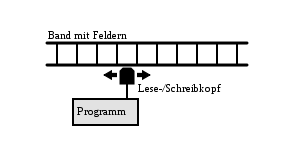

Die Turingmaschine hat ein Steuerwerk, in dem sich das Programm befindet, und besteht außerdem aus
- einem unendlich langen Speicherband mit unendlich vielen sequentiell angeordneten Feldern. Pro Feld kann genau ein Zeichen aus einem vordefinierten Alphabet gespeichert werden. Als zusätzliches Zeichen ist ein Blank (englisch für „leer/unbeschrieben“) zugelassen, das einem leeren Feld auf dem Speicherband entspricht.
- einem programmgesteuerten Lese- und Schreibkopf, der sich auf dem Speicherband feldweise bewegen und die Zeichen verändern (im Fall eines zu ‚schreibenden‘ Blanks auch löschen) kann.
Eine Berechnung für ein Eingabewort startet mit dem Eingabewort auf dem Band und dem Lese- und Schreibkopf auf dem ersten Symbol des Eingabeworts. Die Turingmaschine verarbeitet dann die Eingabe auf dem Band schrittweise nach dem festgelegten Programm.
Mit jedem Schritt liest der Lese-Schreib-Kopf das aktuelle Zeichen, überschreibt dieses mit einem anderen (oder dem gleichen) Zeichen und bewegt sich dann ein Feld nach links oder rechts oder bleibt stehen. Welches Zeichen geschrieben wird und welche Bewegung ausgeführt wird, hängt von dem an der aktuellen Position vorgefundenen Zeichen sowie dem Zustand ab, in dem sich die Turingmaschine gerade befindet. Dies wird durch eine zu der Turingmaschine gehörende Überführungsfunktion definiert. Zu Beginn befindet sich die Turingmaschine in einem vorgegebenen Startzustand und geht bei jedem Schritt in einen neuen Zustand über. Die Anzahl der Zustände, in denen sich die Turingmaschine befinden kann, ist endlich. Ein Zustand kann mehrere Male durchlaufen werden, er sagt nichts über die auf dem Band vorliegenden Zeichen aus.
Eine Turingmaschine stoppt, wenn für den aktuellen Zustand und das gelesene Bandsymbol keine Überführung zu einem neuen Zustand definiert ist. Es hängt also im Allgemeinen von der Kombination aus Zustand und Symbol ab, ob die Turingmaschine weiter rechnet oder stoppt. Zustände, in denen die Turingmaschine unabhängig von dem gelesenen Bandsymbol anhält, bezeichnet man als Endzustände. Es gibt aber auch Turingmaschinen, die für gewisse Eingaben niemals stoppen.
Neben der Berechnung von Funktionen wird die Turingmaschine – wie viele andere Automaten – auch für Entscheidungsprobleme eingesetzt, also für Fragen, die mit „ja“ oder „nein“ zu beantworten sind. Bestimmte Endzustände werden als „akzeptierend“, andere als „nicht akzeptierend“ definiert. Die Eingabe wird genau dann akzeptiert, wenn die Turingmaschine in einem akzeptierenden Endzustand endet.
Bedeutung
Der Mathematiker Alan Turing stellte die Turingmaschine 1936 im Rahmen des von David Hilbert im Jahr 1920 formulierten Hilbertprogramms speziell zur Lösung des so genannten Entscheidungsproblems in der Schrift On Computable Numbers, with an Application to the Entscheidungsproblem vor.
Das von Hilbert aufgestellte Entscheidungsproblem fragt, ob eine gegebene Formel der Prädikatenlogik allgemeingültig ist, also ob die Formel unter jeder Interpretation wahr ist. Hilbert stellte die Frage, ob dieses Problem automatisch gelöst werden kann. Die Methode, die für eine prädikatenlogische Formel bestimmt, ob sie allgemeingültig ist, soll also von einer „Maschine“ durchgeführt werden können. Vor der Erfindung des Computers bedeutete dies, dass ein Mensch nach festen Regeln – einem Algorithmus – eine Berechnung durchführt.
Turing definierte mit seinem Modell die Begriffe des Algorithmus und der Berechenbarkeit als formale, mathematische Begriffe. Im Allgemeinen wird davon ausgegangen, dass die Turing-Berechenbarkeit das intuitive Verständnis von Berechenbarkeit trifft, diese Aussage ist als Church-Turing-These bekannt. Ihr wohnt eine starke Plausibilität inne, u.a. durch die mathematische Äquivalenz des Begriffs der Turing-Berechenbarkeit mit anderen Berechenbarkeits-Begriffen (wie zum Beispiel der Ausdrückbarkeit im Lambda-Kalkül oder als partiell-rekursive Funktion, sowie die Berechenbarkeit durch Registermaschinen, welche strukturell heute verwendeten Computern nachempfunden sind). Das Besondere an einer Turingmaschine ist dabei ihre strukturelle Einfachheit. Sie benötigt nur drei Operationen (Lesen, Schreiben und Schreib-Lese-Kopf bewegen), um alle Operationen der üblichen Computerprogramme zu simulieren. Im Rahmen der theoretischen Informatik eignet sie sich deshalb besonders gut zum Beweis von Eigenschaften formaler Probleme, wie sie von der Komplexitäts- und Berechenbarkeitstheorie betrachtet werden.
Die Komplexität (etwa Laufzeit- und Speicherkomplexität) von Algorithmen wird in Bezug auf bestimmte Maschinenmodelle definiert. Auf Turingmaschinen ist etwa die asymptotische Anzahl der Zustandsübergänge in Abhängigkeit von der Eingabelänge ein mögliches Laufzeitkomplexitätsmaß eines Algorithmus. Auf anderen Modellen werden oftmals Komplexitätsmaße definiert, die einen wahlfreien Zugriff auf jede Speicherzelle oder die Ausführung arithmetischer Operationen als einzelne Schritte definieren. Diese Maße eignen sich im beschränkten Rahmen (kleiner Datenmengen bzw. kleiner Zahlen) besonders gut, um die Laufzeit vieler Algorithmen auf realen Computern abzuschätzen und sind dementsprechend oft (insbesondere unspezifiziert) anzutreffen. Auf Grund der sequentiellen Struktur von Turingmaschinen ist daher die Laufzeitkomplexität im Sinne der asymptotischen Anzahl der Zustandsübergänge für viele Algorithmen verglichen mit Definitionen für Registermaschinen höher. Die Komplexitätstheorie befasst sich mit der Frage, für welche Probleme Algorithmen mit welcher Komplexität existieren, etwa in welchen Komplexitätsklassen Probleme liegen bzw. nicht liegen. Sofern es bei der Untersuchung der Laufzeitkomplexität nicht auf Faktoren polynomiell in der Eingabelänge ankommt, sind Turingmaschinen hier recht allgemein einsetzbar, da die Simulation vieler Registermaschinen in vielen Komplexitätsmaßen nur polynomiellen Mehraufwand bedeutet.
Nicht alle mathematischen Funktionen können von einer Turingmaschine berechnet werden, selbst wenn man sich auf wohldefinierte Funktionen mit endlicher Ein- und Ausgabe beschränkt (etwa lassen sich Funktionen zwischen beliebigen reellen Zahlen nicht durch Funktionen mit endlicher Ein- und Ausgabe repräsentieren, da die reellen Zahlen überabzählbar sind, und es gibt formal gesehen Funktionen, die sich überhaupt nicht spezifizieren lassen). So konnte Turing zeigen, dass eine Turingmaschine das Hilbertsche Entscheidungsproblem nicht lösen kann, genau so wenig wie das Halteproblem.
Ebenfalls unentscheidbar ist nach dem Satz von Rice jedwede nicht-triviale Eigenschaft eines Programms in einer turingmächtigen Programmiersprache. Selbst wenn man sich auf terminierende Turingmaschinen beschränkt, ist es unentscheidbar, ob zwei terminierende Turingmaschinen dieselbe Sprache akzeptieren. Die Berechenbarkeitstheorie beschäftigt sich mit der Frage, welche Probleme von welchen Maschinenmodellen berechenbar bzw. nicht berechenbar sind.
Systeme, Computer und Programmiersprachen, die unter Ausblendung der Beschränktheit des Speichers und damit verbundener Eigenschaften eine Turingmaschine emulieren könnten, werden als turingvollständig bezeichnet.
Formale Definition
Formal kann eine deterministische
Turingmaschine als 7-Tupel  dargestellt werden (siehe auch nichtdeterministische
Turingmaschine).
dargestellt werden (siehe auch nichtdeterministische
Turingmaschine).
 ist die endliche Zustandsmenge
ist die endliche Zustandsmenge ist das endliche Eingabealphabet
ist das endliche Eingabealphabet ist das endliche Bandalphabet und es gilt
ist das endliche Bandalphabet und es gilt 
 ist die (partielle) Überführungsfunktion
ist die (partielle) Überführungsfunktion ist der Anfangszustand
ist der Anfangszustand steht für das leere Feld (Blank)
steht für das leere Feld (Blank) die Menge der akzeptierenden Endzustände
die Menge der akzeptierenden Endzustände
Die partielle Überführungsfunktion  liefert zu einem Zustand und einem gelesenen Bandsymbol (i) den nächsten
Zustand, (ii) ein Bandsymbol das in das aktuelle Feld geschrieben wird, und
(iii) die Bewegungsrichtung des Lese-Schreib-Kopf (L .. ein Feld nach links, N
.. nicht bewegen, R .. ein Feld nach rechts). Da in akzeptierenden Endzuständen
die Berechnung auf jeden Fall anhält, sind diese in der Definition der
Überführungsfunktion ausgenommen.
liefert zu einem Zustand und einem gelesenen Bandsymbol (i) den nächsten
Zustand, (ii) ein Bandsymbol das in das aktuelle Feld geschrieben wird, und
(iii) die Bewegungsrichtung des Lese-Schreib-Kopf (L .. ein Feld nach links, N
.. nicht bewegen, R .. ein Feld nach rechts). Da in akzeptierenden Endzuständen
die Berechnung auf jeden Fall anhält, sind diese in der Definition der
Überführungsfunktion ausgenommen.
Konfigurationen

 .
Der Lese-Schreibkopf befindet sich über dem grau hervorgehobenen
.
Der Lese-Schreibkopf befindet sich über dem grau hervorgehobenen  -Symbol.
Verwendet man
als das Blank Symbol der Turingmaschine entspricht diese Konfiguration dem
Tripel
-Symbol.
Verwendet man
als das Blank Symbol der Turingmaschine entspricht diese Konfiguration dem
Tripel 
Die Konfiguration einer Turingmaschine beschreibt nicht nur den ihr eigenen
momentanen Zustand  ,
sondern auch die Position des Lese-Schreib-Kopfes und die gerade auf dem Band
vorhandenen Symbole. Die Symbole befinden sich in einem endlichen Bereich des
Bandes, der von unendlich vielen leeren Symbolen umgeben ist. Es genügt deshalb,
diesen endlichen Bereich zu betrachten.
,
sondern auch die Position des Lese-Schreib-Kopfes und die gerade auf dem Band
vorhandenen Symbole. Die Symbole befinden sich in einem endlichen Bereich des
Bandes, der von unendlich vielen leeren Symbolen umgeben ist. Es genügt deshalb,
diesen endlichen Bereich zu betrachten.
Formal besteht eine Konfiguration aus dem aktuellen Zustand ,
einem endlichen Wort  ,
das den Inhalt des Bands links des Lese-Schreib-Kopfes enthält und einem
endlichen Wort
,
das den Inhalt des Bands links des Lese-Schreib-Kopfes enthält und einem
endlichen Wort  ,
das den Inhalt des Bandes ab der aktuellen Position des Lese-Schreib-Kopfes
enthält. Eine Konfiguration ist also ein Tripel
,
das den Inhalt des Bandes ab der aktuellen Position des Lese-Schreib-Kopfes
enthält. Eine Konfiguration ist also ein Tripel  mit ,
,
,
wobei das Band durch
mit ,
,
,
wobei das Band durch  gegeben ist und der Lese-Schreib-Kopf auf dem ersten Zeichen von
gegeben ist und der Lese-Schreib-Kopf auf dem ersten Zeichen von  steht.
steht.
Oft werden Konfiguration auch durch eine Folge  ,
mit
,
mit  beschrieben, bei der der aktuelle Zustand
beschrieben, bei der der aktuelle Zustand  an der aktuellen Position des Lese-Schreibkopfes in das Wort, das den
Bandinhalt wiedergibt, eingefügt wird.
an der aktuellen Position des Lese-Schreibkopfes in das Wort, das den
Bandinhalt wiedergibt, eingefügt wird.  ist das am weitesten links stehende, nicht-leere Bandsymbol,
ist das am weitesten links stehende, nicht-leere Bandsymbol,  das am weitesten rechts stehende, nicht-leere Bandsymbol, und
das am weitesten rechts stehende, nicht-leere Bandsymbol, und  das Symbol über dem sich der Lese-Schreibkopf befindet. Bewegt sich der
Lese-Schreib-Kopf über den Rand hinaus, sind der Konfiguration noch weitere
das Symbol über dem sich der Lese-Schreibkopf befindet. Bewegt sich der
Lese-Schreib-Kopf über den Rand hinaus, sind der Konfiguration noch weitere
 -Symbole
hinzuzufügen.
-Symbole
hinzuzufügen.
Durch eine Startkonfiguration wird das Eingabewort festgelegt. Eine übliche
Startkonfiguration ist  mit Startzustand
mit Startzustand  und Eingabewort
und Eingabewort  .
Diese entspricht dem Tripel
.
Diese entspricht dem Tripel  ,
wobei
,
wobei  das leere Wort ist.
das leere Wort ist.
Berechnung
Die Überführungsfunktion
gibt zu einer Startkonfiguration den Ablauf einer Turingmaschine vor. Sie
wechselt in einem Schritt von der aktuellen Konfiguration in die
Nachfolgekonfiguration. Ein solcher Schritt von Konfiguration  zu Konfiguration
zu Konfiguration  kann als
kann als  dargestellt werden.
dargestellt werden.
Schreibt die Überführungsfunktion für einen Zustand
und das Eingabesymbol
zum Beispiel vor, dass  geschrieben wird, der Lese-Schreibkopf sich nach links bewegt und der
Nachfolgezustand
geschrieben wird, der Lese-Schreibkopf sich nach links bewegt und der
Nachfolgezustand  ist, so bedeutet dies folgenden Schritt:
ist, so bedeutet dies folgenden Schritt:  .
.
Die Berechnung einer Turingmaschine ist eine endliche oder unendliche Folge
von Konfigurationsschritten. Eine Turingmaschine akzeptiert ein durch die
Startkonfiguration gegebenes Wort, wenn die Berechnung in dieser
Startkonfiguration beginnt und in einer Konfiguration endet, in der die
Turingmaschine in einem akzeptierenden Endzustand  ist. Endet die Berechnung in einer anderen Konfiguration, verwirft die
Turingmaschine das Eingabewort. Ist die Berechnung der Turingmaschine unendlich,
wird das Wort weder akzeptiert noch verworfen.
ist. Endet die Berechnung in einer anderen Konfiguration, verwirft die
Turingmaschine das Eingabewort. Ist die Berechnung der Turingmaschine unendlich,
wird das Wort weder akzeptiert noch verworfen.
Intuition
Die Turingmaschine führt eine Berechnung aus, indem sie schrittweise eine Eingabe in eine Ausgabe umwandelt. Ein-, Ausgabe und Zwischenergebnisse werden auf dem unendlich langen Band gespeichert.
Zu Beginn steht ein Wort als Eingabe auf dem Band (pro Bandfeld ein Zeichen
des Eingabewortes), der Rest des Bandes besteht aus leeren Feldern .
Der Lese-Schreib-Kopf steht auf dem ersten Zeichen der Eingabe und die
Turingmaschine befindet sich im Startzustand .
Die Überführungsfunktion gibt an, wie die Turingmaschine schrittweise den Bandinhalt liest und beschreibt, ihren Zustand wechselt und die Position des Lese-Schreib-Kopfes ändert. Diese Funktion nimmt als Argument den aktuellen Zustand und das Zeichen, das sich in der aktuellen Konfiguration unter dem Lese-Schreib-Kopf befindet. Als Ergebnis liefert sie dann:
- genau einen Zustand (dieser wird zum Nachfolgezustand der Turingmaschine),
- ein Zeichen (mit diesem wird der Inhalt des Feldes, auf welches der Lese-Schreib-Kopf weist, überschrieben) und
- entweder das Symbol L (in diesem Fall bewegt sich der Lese-Schreib-Kopf um ein Feld nach links), R (in diesem Fall bewegt er sich ein Feld nach rechts) oder N (dann verharrt er auf demselben Feld).
Damit hat die Turingmaschine einen Schritt ihres Arbeitszyklus durchlaufen und steht für einen weiteren bereit.
Da die Überführungsfunktion partiell ist, muss sie nicht für jeden Zustand
und jedes Eingabezeichen einen Übergang definieren. Der Endzustand hat
beispielsweise für kein Eingabezeichen einen Nachfolgezustand. Erreicht die
Turingmaschine einen Endzustand ,
kann die Turingmaschine deshalb keine weiteren Aktionen durchführen, und die
Berechnung ist beendet. Die Ausgabe ist dann der Inhalt des Bandes.
Beispiel
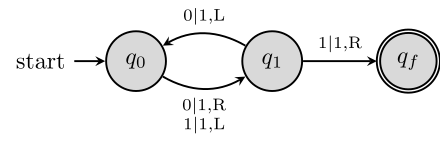
Die folgende deterministische Ein-Band-Turingmaschine  erwartet eine Folge von Einsen als Eingabe auf dem Band. Sie verdoppelt die
Anzahl der Einsen, wobei ein Leersymbol in der Mitte stehen bleibt. Aus „11“
wird beispielsweise die Zeichenfolge „11011“. Der Schreib-/Lesekopf befindet
sich initial auf der ersten Eins. Der Anfangszustand ist
erwartet eine Folge von Einsen als Eingabe auf dem Band. Sie verdoppelt die
Anzahl der Einsen, wobei ein Leersymbol in der Mitte stehen bleibt. Aus „11“
wird beispielsweise die Zeichenfolge „11011“. Der Schreib-/Lesekopf befindet
sich initial auf der ersten Eins. Der Anfangszustand ist  ,
der Endzustand
,
der Endzustand  .
Die Null steht für das leere Feld
und das Band besteht bis auf die darauf geschriebenen Einsen aus leeren Feldern.
.
Die Null steht für das leere Feld
und das Band besteht bis auf die darauf geschriebenen Einsen aus leeren Feldern.




Die Überführungsfunktion
ist wie folgt definiert:
 als Graph
als Graph| aktueller Zustand |
geles. Symbol |
schr. Symbol |
neuer Zustand |
Kopf- richtung | |
|---|---|---|---|---|---|
| s1 | 1 | → | 0 | s2 | R |
| s1 | 0 | → | 0 | s6 | N |
| s2 | 1 | → | 1 | s2 | R |
| s2 | 0 | → | 0 | s3 | R |
| s3 | 1 | → | 1 | s3 | R |
| s3 | 0 | → | 1 | s4 | L |
| s4 | 1 | → | 1 | s4 | L |
| s4 | 0 | → | 0 | s5 | L |
| s5 | 1 | → | 1 | s5 | L |
| s5 | 0 | → | 1 | s1 | R |
durchläuft im oben erwähnten Beispiel, also bei der Eingabe „11“, folgende
Zustände, wobei die aktuelle Kopfposition fett gedruckt ist:

| Schritt | Zust. | Band |
|---|---|---|
| 1 | s1 | 11000 |
| 2 | s2 | 01000 |
| 3 | s2 | 01000 |
| 4 | s3 | 01000 |
| 5 | s4 | 01010 |
| 6 | s5 | 01010 |
| 7 | s5 | 01010 |
| 8 | s1 | 11010 |
| Schritt | Zust. | Band |
|---|---|---|
| 9 | s2 | 10010 |
| 10 | s3 | 10010 |
| 11 | s3 | 10010 |
| 12 | s4 | 10011 |
| 13 | s4 | 10011 |
| 14 | s5 | 10011 |
| 15 | s1 | 11011 |
| 16 | s6 | -halt- |
Die Berechnung beginnt im Anfangszustand .
Hier wird die erste Eins durch ein leeres Feld ersetzt, der Schreib-Lese-Kopf
bewegt sich nach rechts und neuer Zustand wird  .
Der Kopf wandert nun solange nach rechts, bis ein leeres Feld gelesen wird.
Danach gelangt die Turingmaschine in den Zustand
.
Der Kopf wandert nun solange nach rechts, bis ein leeres Feld gelesen wird.
Danach gelangt die Turingmaschine in den Zustand  und überliest alle weiteren Einsen, bis sie erneut ein leeres Feld findet.
Dieses wird dann durch eine Eins ersetzt. Im Zustand
und überliest alle weiteren Einsen, bis sie erneut ein leeres Feld findet.
Dieses wird dann durch eine Eins ersetzt. Im Zustand  bewegt sich der Kopf zurück, überliest wieder alle Einsen, bis er auf ein leeres
Feld trifft, Zustandswechsel auf
bewegt sich der Kopf zurück, überliest wieder alle Einsen, bis er auf ein leeres
Feld trifft, Zustandswechsel auf  .
Der Kopf bewegt sich nun solange nach links, bis das ursprünglich in Zustand
geschriebene leere Feld gefunden wird. Dieses wird wieder durch eine Eins
ersetzt, der Kopf bewegt sich ein Feld nach rechts und die Turingmaschine
gelangt wieder in den Zustand .
Hier beginnt ein neuer Rechenzyklus.
.
Der Kopf bewegt sich nun solange nach links, bis das ursprünglich in Zustand
geschriebene leere Feld gefunden wird. Dieses wird wieder durch eine Eins
ersetzt, der Kopf bewegt sich ein Feld nach rechts und die Turingmaschine
gelangt wieder in den Zustand .
Hier beginnt ein neuer Rechenzyklus.
Wird im Zustand
ein leeres Feld gelesen, so gelangt die Turingmaschine
in den Endzustand ,
woraufhin die Berechnung beendet wird.
Äquivalente Varianten der Turingmaschine
In der Literatur findet man zahlreiche unterschiedliche Definitionen und Varianten der Turingmaschine, die sich jeweils in einigen Details unterscheiden. Diese sind äquivalent in dem Sinne, dass Turingmaschinen einer Definition leicht in Turingmaschinen der anderen Definitionen umgewandelt werden können, sodass diese die gleichen Berechnungen durchführen. Häufige Abweichungen von der obigen Definition sind:
- Es wird nicht zwischen Eingabealphabet und Bandalphabet unterschieden.
- Statt einer Menge von akzeptierenden Endzuständen gibt es nur einen einzigen akzeptierenden Endzustand.
- Zusätzlich zu einem oder mehreren akzeptierenden Endzuständen gibt es noch einen oder mehrere verwerfende Endzustände.
- Der Lese-Schreib-Kopf bewegt sich immer entweder nach links oder nach
rechts. Für die Bewegung des Kopfes gibt es also nur die Symbole
 .
. - Die Funktion
ist als totale Funktion gegeben. Die Maschine hält in Endzuständen und in
Zuständen ,
wenn das Symbol
 gelesen wird und
gelesen wird und  .
. - Semiunendliches Speicherband: Das Speicherband ist nur in eine Richtung unendlich. Es gibt ein spezielles Symbol, das den Anfang der Eingabe markiert. Der Lese-/Schreibkopf kann sich dann nicht darüber hinaus nach links bewegen, aber beliebig weit nach rechts.
Zudem gibt es Erweiterungen, die ebenfalls hinsichtlich der Berechenbarkeit äquivalent zu Turingmaschinen sind. Selbst komplexitätstheoretisch sind die Unterschiede zwischen vielen der Varianten weitgehend zu vernachlässigen. Insgesamt führen sehr viele Varianten zu nicht mehr als polynomialen Aufwandsunterschieden (wobei Aufwand hier eine beliebige Ressource meint) und sind daher für viele komplexitätstheoretische Untersuchungen vernachlässigbar. Man passt in Abhängigkeit von den Zielen der jeweiligen Analyse das verwendete Modell so an, dass die Analyse möglichst einfach durchgeführt werden kann. Es gibt jedoch auch hinsichtlich der Berechenbarkeit, nicht aber der Komplexität (im Sinne von „bis auf polynomiellen Mehraufwand“), äquivalente Erweiterungen der Turingmaschine, wie zum Beispiel nichtdeterministische Turingmaschinen und bestimmte Orakel-Turingmaschinen.
- Mehrspuren-Turingmaschine (engl. Multi-track Turing machine): Turingmaschinen, die erlauben, mehrere Symbole in ein Feld des Speicherbands zu speichern.
- Mehrband-Turingmaschine (engl. Multitape Turing machine): Turingmaschinen mit mehreren Bändern mit jeweils einem Lese-Schreib-Kopf.
- Vergessliche Turingmaschine (engl. Oblivious Turing machines): Eine Turingmaschine wird vergesslich oder auch bewegungsuniform genannt, falls die Kopfbewegungen nicht vom konkreten Inhalt der Eingabe abhängen, sondern nur von der Länge der Eingabe. Jede Turingmaschine kann durch eine vergessliche simuliert werden.
- Zweikellerautomat (engl. Two-stack Push Down Automaton): Ein Kellerautomat mit zwei Kellerspeichern.
- Zählermaschinen (engl. Counter Machine) mit mindestens 2 Zählern.
Überführungsfunktion δ als Ganzzahl
In seinem ursprünglichen Artikel zu Hilberts Entscheidungsproblem beschreibt Alan Turing eine Möglichkeit, die Überführungsfunktion, die man meistens grafisch abbildet oder in einer Tabelle aufschreibt, mithilfe einer einzigen Zahl zu definieren. Dazu überführt er die Tabelle zuerst in eine Normalform und ersetzt dann die einzelnen Zustände, Buchstaben und Anweisungen durch Zahlen, die dann zu einer langen Zahl zusammengefasst werden.
Universelle Turingmaschine
In der obigen Definition ist das Programm fest in die Maschine eingebaut und kann nicht verändert werden. Kodiert man die Beschreibung einer Turingmaschine als hinreichend einfache Zeichenkette, so kann man eine sogenannte universelle Turingmaschine – selbst eine Turingmaschine – konstruieren, welche eine solche Kodierung einer beliebigen Turingmaschine als Teil ihrer Eingabe nimmt und das Verhalten der kodierten Turingmaschine auf der ebenfalls gegebenen Eingabe simuliert. Aus der Existenz einer solchen universellen Turingmaschine folgt zum Beispiel die Unentscheidbarkeit des Halteproblems. Eine ähnliche Idee, bei der das Programm als ein Teil der veränderbaren Eingabedaten betrachtet wird, liegt auch fast allen heutigen Rechnerarchitekturen zugrunde (Von-Neumann-Architektur).
Formal ist eine universelle Turingmaschine eine Maschine  ,
die eine Eingabe
,
die eine Eingabe  liest. Das Wort
liest. Das Wort  ist hierbei eine hinreichend einfache Beschreibung einer Maschine
ist hierbei eine hinreichend einfache Beschreibung einer Maschine  ,
die zu einer bestimmten Funktion mit Eingabe
,
die zu einer bestimmten Funktion mit Eingabe  die Ausgabe berechnet.
die Ausgabe berechnet.  ist ein Trennzeichen zwischen Programmbeschreibung und Eingabe.
simuliert also das Verhalten von
mit Hilfe der Funktionsbeschreibung
und der Eingabe .
Der Index
ist ein Trennzeichen zwischen Programmbeschreibung und Eingabe.
simuliert also das Verhalten von
mit Hilfe der Funktionsbeschreibung
und der Eingabe .
Der Index  in
zeigt an, dass es nicht nur eine einzige universelle Turingmaschine gibt. So
könnten z.B.
in
zeigt an, dass es nicht nur eine einzige universelle Turingmaschine gibt. So
könnten z.B.  und
und  verschiedene Wörter verstehen. Das Wort
muss dabei in einer Sprache
codiert sein, die die
versteht.
verschiedene Wörter verstehen. Das Wort
muss dabei in einer Sprache
codiert sein, die die
versteht.
Bekannte Turingmaschinen
Fleißiger Biber
Als Fleißige Biber (engl. Busy Beaver) werden die deterministischen Turingmaschinen bezeichnet, die bezogen auf alle terminierenden, deterministischen Turingmaschinen mit derselben Anzahl von Zuständen und Symbolen die maximale Anzahl eines bestimmten Symbols auf das Band schreiben und dann anhalten. Es existiert keine berechenbare Funktion, die einer gegebenen Anzahl von Symbolen und Zuständen einen entsprechenden Fleißigen Biber, die Anzahl der von ihm am Ende geschriebenen Symbole (die sogenannte Radó-Funktion) oder die Anzahl der Schritte zuordnet, die er braucht, um zu terminieren.
Ameise
Christopher Langton Ameise ist eine Turingmaschine mit zweidimensionalem Band (eigentlich eine Fläche) und sehr einfachen Regeln, dessen Bandinhalt als zweidimensionales Bild zunächst chaotisch aussieht, jedoch nach über 10.000 Schritten eine gewisse sichtbare Struktur herausbildet.
An Turingmaschinen angelehnte Maschinenmodelle
Nichtdeterministische Turingmaschine
Eine nichtdeterministische Turingmaschine verwendet anstatt der
Übergangsfunktion
eine Übergangsrelation. In der Konfiguration dieser nichtdeterministischen
Turingmaschine kann es daher mehrere Möglichkeiten für den nächsten
Berechnungsschritt geben. Die Maschine akzeptiert ein Wort, wenn eine der
möglichen Berechnungen, die mit dem Wort als Eingabe starten, einen zu
akzeptierenden Endzustand erreicht.
Alternierende Turingmaschine
Eine alternierende Turingmaschine ist eine nichtdeterministische Turingmaschine, welche die Regeln für die Akzeptanz einer Eingabe erweitert. Dabei werden existentielle und universelle Zustände der Maschine unterschieden. Erstere akzeptieren eine Eingabe, wenn es eine mögliche Berechnung gibt, die akzeptiert, während die zweiten Zustände Eingaben nur dann akzeptieren, wenn alle möglichen Berechnung akzeptiert werden.
Orakel-Turingmaschine
Orakel-Turingmaschinen sind Verallgemeinerungen der Turingmaschine, bei der die Turingmaschine in einem Schritt bestimmte zusätzliche Operationen durchführen kann, etwa die Lösung unentscheidbarer oder nur mit hohem Aufwand entscheidbarer Probleme. Somit erlauben Orakel-Turingmaschinen eine weitere Kategorisierung unentscheidbarer Probleme, oder auch die Definition zusätzlicher Komplexitätsklassen.
Probabilistische Turingmaschine
Probabilistische Turingmaschinen erlauben für jeden Zustand und jede Eingabe zwei (oder äquivalent dazu endlich viele) mögliche Übergänge, von denen bei der Ausführung – intuitiv ausgedrückt – einer zufällig ausgewählt wird, und dienen der theoretischen Beschreibung randomisierter Algorithmen.
Quanten-Turingmaschine
Quanten-Turingmaschinen dienen in der Quanteninformatik als abstrakte Maschinenmodelle zur theoretischen Beschreibung der Möglichkeiten von Quantencomputern. Quantenschaltungen sind in diesem Kontext als anderes verbreitetes Modell zu nennen.
Persistente Turingmaschine
Um interaktive Modelle (im Sinne von „Modellen mit Gedächtnis“) durch eine Turingmaschine darzustellen, ist eine Erweiterung derselben um ebendieses Gedächtnis notwendig.
Laut Definition ist eine Persistente Turingmaschine (PTM) eine nichtdeterministische 3-Band-Turingmaschine mit einem Eingabe-, einem Arbeits- und einem Ausgabeband. Die Eingabe wird auf dem Arbeitsband verarbeitet, und erst nach vollständiger Bearbeitung gelangen die Ergebnisse auf dem Ausgabeband zurück in die „Umwelt“. Danach kann eine erneute Eingabe aus der Umwelt verarbeitet werden. Zwischen zwei Arbeitsschritten bleiben die Inhalte des Arbeitsbandes als „Gedächtnis“ erhalten.
Zenomaschine
Die Zenomaschine ist eine in geometrischer Reihe beschleunigt immer schneller rechnende Turingmaschine. Sie stellt ein fiktives Modell jenseits der Turing-Berechenbarkeit dar.
Beziehung zwischen einer Turingmaschine und einer formalen Sprache
Akzeptierte Sprache
Eine Turingmaschine akzeptiert eine Sprache
 ,
wenn sie bei Eingabe eines jeden Wortes
,
wenn sie bei Eingabe eines jeden Wortes  nach endlich vielen Schritten in einem zu akzeptierenden Zustand hält und bei
Eingabe eines jeden Wortes
nach endlich vielen Schritten in einem zu akzeptierenden Zustand hält und bei
Eingabe eines jeden Wortes  in einem nicht akzeptierenden Zustand oder überhaupt nicht hält.
in einem nicht akzeptierenden Zustand oder überhaupt nicht hält.
Eine Sprache  heißt genau dann rekursiv
aufzählbar bzw. semientscheidbar (Typ 0 der Chomsky-Hierarchie),
wenn es eine Turingmaschine gibt, die
akzeptiert.
heißt genau dann rekursiv
aufzählbar bzw. semientscheidbar (Typ 0 der Chomsky-Hierarchie),
wenn es eine Turingmaschine gibt, die
akzeptiert.
Entscheidbare Sprache
Akzeptiert eine Turingmaschine eine Sprache und hält sie zusätzlich bei allen Eingaben, die nicht zu dieser Sprache gehören, so entscheidet die Turingmaschine diese Sprache.
Eine Sprache
heißt rekursiv oder entscheidbar
genau dann, wenn es eine Turingmaschine gibt, die
entscheidet.
Literatur
- Juraj Hromkovič: Theoretische Informatik. Formale Sprachen, Berechenbarkeit, Komplexitätstheorie, Algorithmik, Kommunikation und Kryptographie. 3., überarbeitete und erweiterte Auflage. Teubner, Wiesbaden 2007, ISBN 978-3-8351-0043-5.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 21.09. 2021